Для определения положений дроссельной заслонки и угловой скорости перемещения
(частоты вращения) коленчатого вала применяют датчики контактного типа.
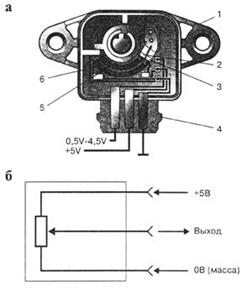
Основой потенциометрического датчика является пленочный резистор с несколькими контактными дорожками, с которыми контактируют упругие токосъемные элементы (см. рис. 2.1.9). Последние связаны с осью датчика и перемещаются вместе с ней. Токосъемные элементы обеспечивают получение сигналов ускорения при резком открытии дроссельной заслонки, о холостом ходе двигателя, информацию о положении дроссельной заслонки и полном или близком к нему открытии дроссельной заслонки.

 в
в
Рис. 2.1.9. Один из вариантов потенциометрического датчика положения дроссельной заслонки:
а – конструкция; б – электрическая схема; в – типичная градуировочная характеристика; 1 - корпус; 2, 3 - скользящие контакты; 4 - электрический разъем; 5, 6 - резистивные дорожки
Основные требования к датчику положения дроссельной заслонки: высокая долговечность и стабильность работы при отсутствии дребезжания контактов. Эти требования выполняются за счет подбора износостойких материалов дорожек и контактных площадок токосъемных элементов.
Недостатки электромеханических датчиков контактного типа отсутствуют в бесконтактных датчиках, в частности, оптоэлектронных датчиках с кодирующим диском. Разрешающая способность датчика может быть меньше 1° за счет применения
прецизионных кодирующих дисков и оптических или фотоэлектрических устройств. Кодирующий диск имеет прорези или прозрачные площадки. По разным сторонам диска установлены источники света и фоточувствительные элементы (обычно фотодиоды). При вращении диска свет попадает на определенную комбинацию фотодиодов (фотоэлементов), что позволяет однозначно определять угол поворота диска.
Индуктивные датчики перемещения в электронных системах управления двигателем используются в основном для измерения частоты вращения коленчатого или распределительного вала двигателя. Они предназначены также для определения ВМТ первого цилиндра или другой специальной метки, служащей началом отсчета для системы управления, чем обеспечивается синхронизация функционирования системы управления с рабочим процессом двигателя.
Индукционная катушка датчика размещена вокруг постоянного магнита, полюс которого со стороны, обращенной к объекту вращения, например, к зубчатому венцу маховика (см. рис. 2.1.10 и 2.1.11), имеет магнитопровод из магнитомягкого материала. Магнитопровод установлен с небольшим зазором относительно зубьев вращающегося зубчатого венца маховика.

 Рис. 2.1.10. Индуктивный датчик:
Рис. 2.1.10. Индуктивный датчик:
1 - корпус; 2 - индукционная катушка; 3 -
магнитопровод; 4 - магнит из феррита бария: 5
- пружинное кольцо; 6 - крышка со штекерами; 7 - фланец
Рис. 2.1.11. Индуктивный датчик вращения:
1 - постоянный магнит; 2 - корпус; 3 - картер двигателя; 4 - магнитомягкий сердечник; 5 - обмотка; 6 - зубчатое колесо с точкой отсчета
При перемещении зубьев относительно магнитопровода величина зазора между ними меняется. Это вызывает изменение магнитной индукции и появление двухполярного электрического импульса в индукционной катушке. Две пикообразные полуволны импульса расположены симметрично относительно оси, проходящей через нулевую точку, а нулевая точка соответствует центру каждого зуба, что позволяет с большой точностью определить их положение.
Амплитуда выходного сигнала датчика зависит от длины воздушного зазора между магнитопроводом и маркерным зубом и от скорости изменения магнитной индукции, зависящей от скорости перемещения зуба.
Индуктивные датчики относятся к числу наиболее надежных датчиков в электронных системах управления автомобильных двигателей.
Рис. 2.1.12. Пьезоэлектрический вибродатчик:
1 - основание; 2 - пьезоэпементы;
Датчики детонации
 Датчики детонации отличаются большим разнообразием по конструкции и физическим принципам работы, так как имеет место большое количество признаков проявления детонации. Соответственно, датчики могут размещаться на двигателе в различных местах.
Датчики детонации отличаются большим разнообразием по конструкции и физическим принципам работы, так как имеет место большое количество признаков проявления детонации. Соответственно, датчики могут размещаться на двигателе в различных местах.
Наиболее распространен способ установления детонации с помощью пьезокварцевого вибродатчика (рис. 2.1.12), все элементы которого крепятся к основанию 1, выполненному из титанового сплава. Пьезоэлектрический преобразователь состоит из двух включенных
3 - инерционная масса; 4 - латунная фольга; 5 - крышка; 6 - кабель
параллельно кварцевых пьезо-элементов. При возникновении детонации (вибрации) инерционная масса 3 воздействует на пьезоэлементы 2 с
соответствующей частотой и усилием. В результате пьезоэффекта появляется переменный сигнал, который снимается с кварцевых пластин с помощью выводов из латунной фольги.