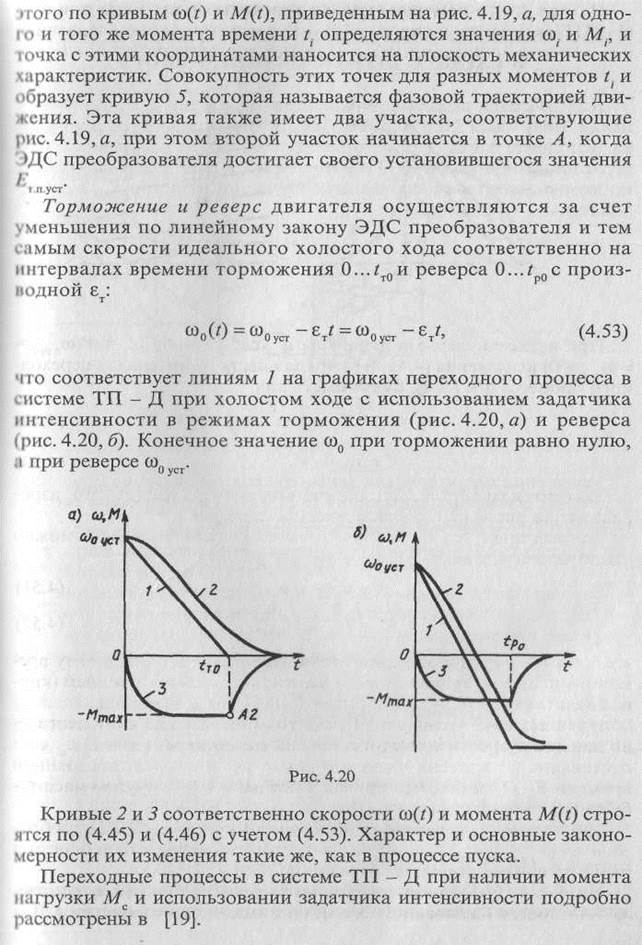
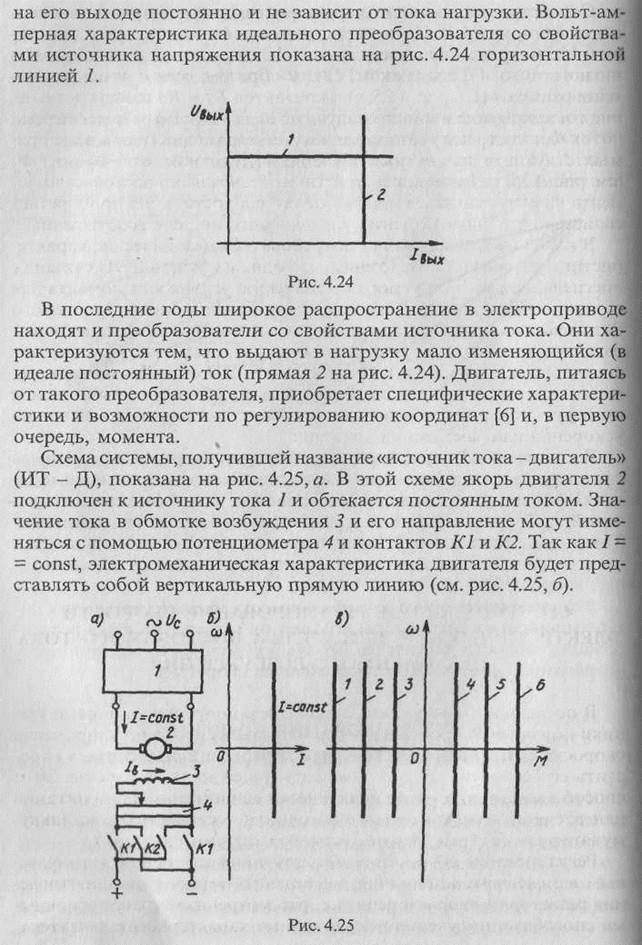
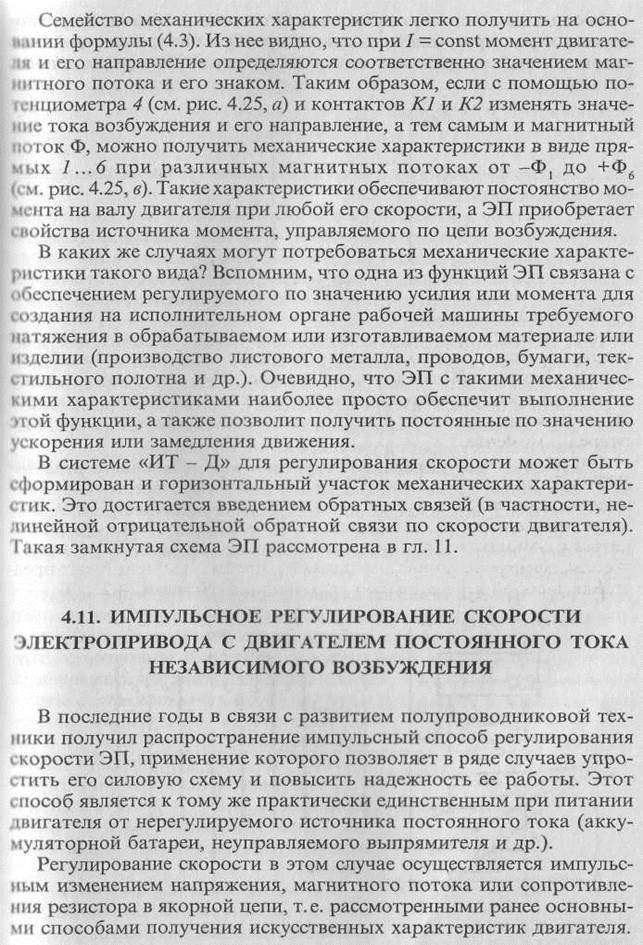
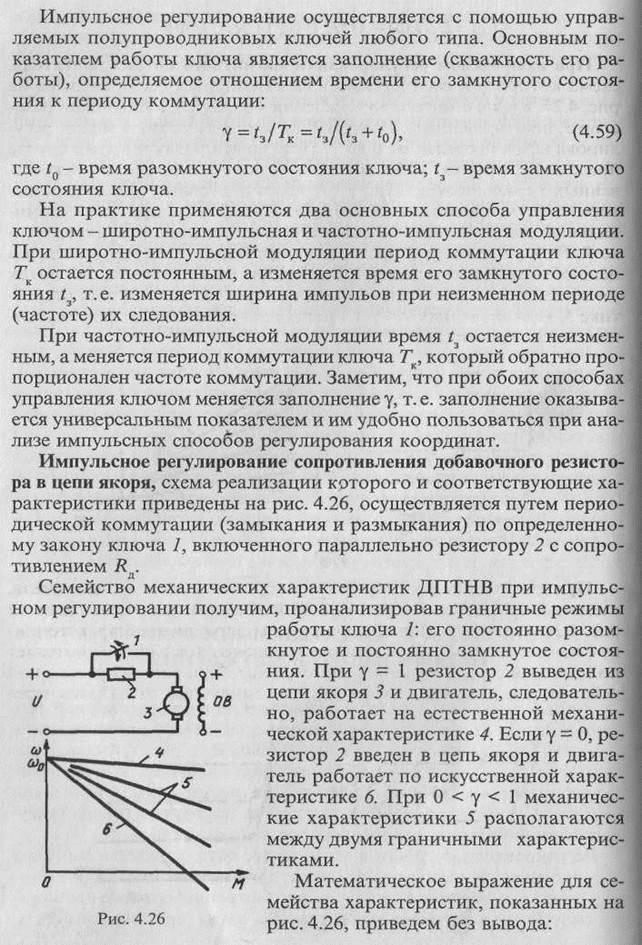
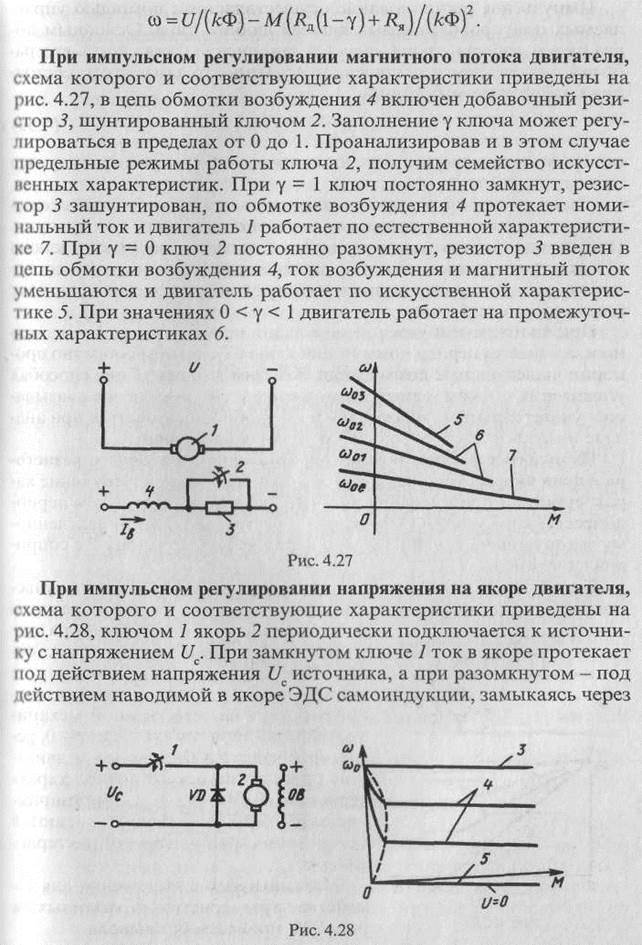
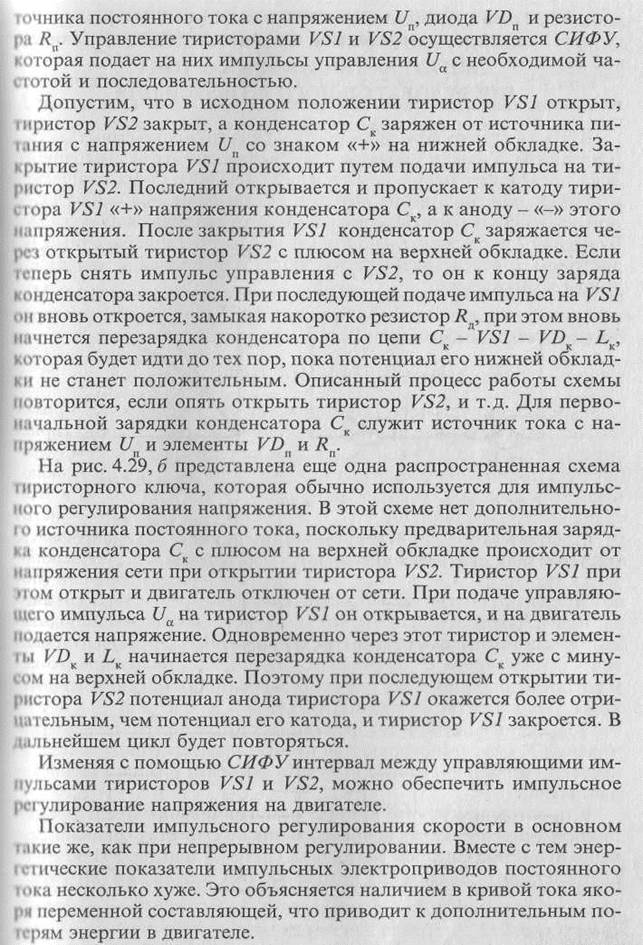
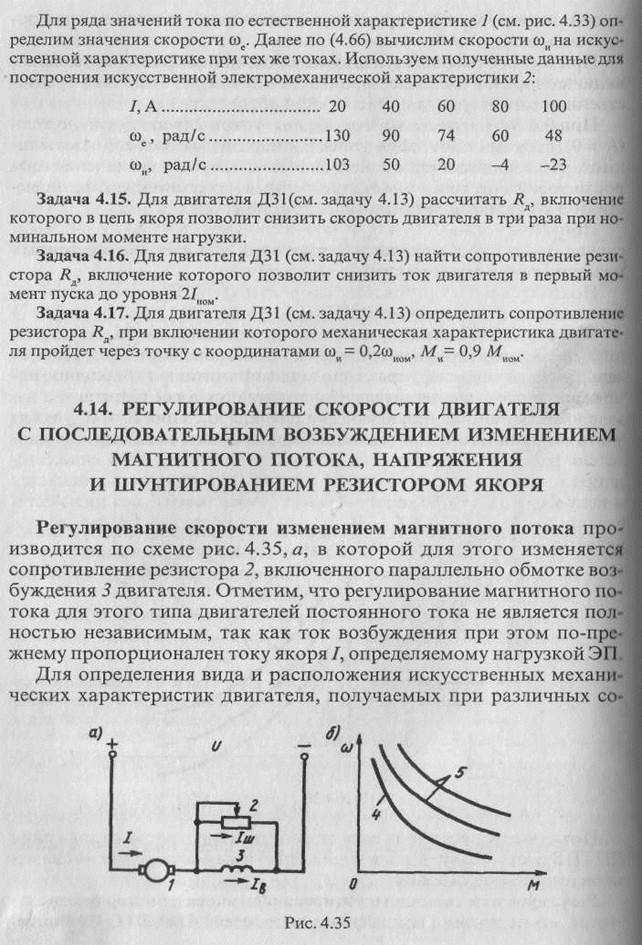
В ЭП используются двигатели постоянного тока независимого (ДПТНВ), последовательного (ДПТПВ) и смешанного (ДПТСВ) возбуждения, а также двигатели с возбуждением от постоянных магнитов, которые по своим характеристикам близки к ДПТНВ.
Электроприводы с ДПТНВ являлись до недавнего времени основным видом регулируемого ЭП. Созданные на базе системы «управляемый выпрямитель - двигатель» (УВ - Д) замкнутые ЭП обеспечивают регулирование координат движения исполнительных органов рабочих машин и механизмов во всех режимах работы с высокими показателями качества.
Электротехническая промышленность выпускает двигатели постоянного тока основной общепромышленной серии 2П в диапазоне мощностей от 0,13 до 200 кВт различного конструктивного исполнения и с разными способами вентиляции, предназначенные в первую очередь для работы в регулируемых ЭП. В частности, эти двигатели имеют встроенный датчик скорости - тахогенератор и ориентированы на питание от тиристорных преобразователей.
Усовершенствование двигателей постоянного тока привело к разработке новой серии 4П, рассчитанной на напряжения 110 и 220 В, со скоростями вращения от 750 до 3000 об /мин и номинальными моментами от 2 до 15 000 Н-мс улучшенными удельными энергетическими показателями, динамическими и виброакустическими свойствами. Кроме того, трудоемкость их изготовления по сравнению с серией 2П снижена в 2,5...3 раза при уменьшении расхода меди на 25...30%.
Для ЭП ряда рабочих машин и механизмов выпускаются специализированные серии ДПТНВ. Для ЭП металлорежущих станков помимо серий 2П и 4П применяются двигатели серий ПБСТ и ПГТ (с гладким якорем), а также высокомоментные двигатели серий ПБВ, ДК1 и ДК2 с возбуждением от постоянных магнитов.
Для крановых механизмов выпускаются двигатели серии Д с независимым и последовательным возбуждением, исполнение которых максимально учитывает условия их работы и предъявляемые к ним требования. Для краново-металлургических ЭП применяются также двигатели с независимым, последовательным и смешанным возбуждением серий ДП.
Специализированные серии ДПТ выпускаются и для металлургического производства (например, прокатные двигатели серий НП и ПП), текстильной промышленности и ряда других отраслей народного хозяйства.
4.1. СХЕМА ВКЛЮЧЕНИЯ И СТАТИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Основная схема включения ДПТНВ представлена на рис. 4.1, а, где приняты следующие обозначения:  - соответственно токи в цепях обмоток якоря и возбуждения, А; Е - ЭДС якоря, В;
- соответственно токи в цепях обмоток якоря и возбуждения, А; Е - ЭДС якоря, В;  и М - соответственно угловая скорость, рад/с, и момент,
и М - соответственно угловая скорость, рад/с, и момент,  двигателя;
двигателя;
 - сопротивление якоря, состоящее из сопротивлений обмотки якоря, добавочных полюсов, компенсационной обмотки и щеточного контакта, Ом;
- сопротивление якоря, состоящее из сопротивлений обмотки якоря, добавочных полюсов, компенсационной обмотки и щеточного контакта, Ом;  - сопротивление обмотки возбуждения (ОВ), Ом;
- сопротивление обмотки возбуждения (ОВ), Ом;  - соответственно индуктивности обмоток якоря и возбуждения, Гн. На схеме показаны добавочные резисторы в цепях обмоток якоря
- соответственно индуктивности обмоток якоря и возбуждения, Гн. На схеме показаны добавочные резисторы в цепях обмоток якоря  и возбуждения
и возбуждения  а также отдельные источники питания обмоток якоря и возбуждения с напряжениями соответственно U и
а также отдельные источники питания обмоток якоря и возбуждения с напряжениями соответственно U и 
 При выводе уравнений для статических характеристик двигателя примем следующие допущения: реакция якоря не учитывается; момент на валу двигателя равен электромагнитному моменту. Тогда равнения для напряжения, ЭДС якоря и электромагнитного моментабудут иметь вид
При выводе уравнений для статических характеристик двигателя примем следующие допущения: реакция якоря не учитывается; момент на валу двигателя равен электромагнитному моменту. Тогда равнения для напряжения, ЭДС якоря и электромагнитного моментабудут иметь вид
R - полное сопротивление цепи якоря, Ом; Ф - магнитный поток, Вб; U- подводимое к якорю напряжение, В;  - конструктивный коэффициент двигателя; р - число пар полюсов; N - число активных проводников обмотки якоря; а - число параллельных ветвей обмотки якоря.
- конструктивный коэффициент двигателя; р - число пар полюсов; N - число активных проводников обмотки якоря; а - число параллельных ветвей обмотки якоря.
Подставляя (4.2) в (4.1), получим формулу для электромеханическойхарактеристики 

Формулу для механической характеристики  ДПТНВполучим из (4.4) с использованием выражения (4.3):
ДПТНВполучим из (4.4) с использованием выражения (4.3):

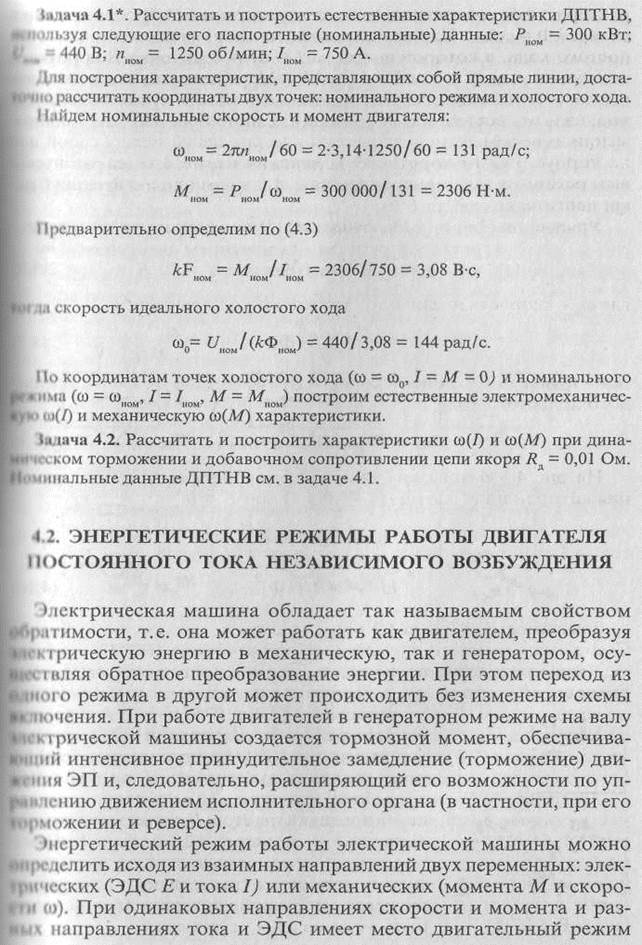
В соответствии с (4.4) и (4.5) электромеханическая и механическая характеристики ДПТНВ представляют собой линейные зависимости угловой скорости (далее скорости) от тока и момента, вид которых для разных полярностей питающего якорь напряжения показан на рис. 4.1, б. Здесь электромеханическая и механическая характеристики совмещены, что в соответствии с (4.3) справедливо в случае кФ = const.

Их характерными точками являются точка А холостого хода, в которой  а I = М = О, и точка В короткою замыкания, где
а I = М = О, и точка В короткою замыкания, где  = 0, а
= 0, а  и
и  Отметим, что режим короткого замыкания для электрической машины соответствует неподвижному состоянию якоря при поданном на двигатель напряжении, а не замыканию его электрических цепей между собой или на корпус. Режим короткого замыкания называется также пусковым режимом, поскольку является начальным при включении (пуске) двигателя.
Отметим, что режим короткого замыкания для электрической машины соответствует неподвижному состоянию якоря при поданном на двигатель напряжении, а не замыканию его электрических цепей между собой или на корпус. Режим короткого замыкания называется также пусковым режимом, поскольку является начальным при включении (пуске) двигателя.
Уравнения (4.4) и (4.5) можно записать в сокращенной форме: 
где  - скорость идеального холостого хода двигателя,
- скорость идеального холостого хода двигателя,

 - изменение угловой скорости относительно скорости идеального холостого хода,
- изменение угловой скорости относительно скорости идеального холостого хода,

На рис. 4.1,б показана также характеристика ДПТНВ, уравнения которой получают из (4.4) и (4.5) при U = 0:


Зависимости  и
и  при U = 0 также являются линейными.
при U = 0 также являются линейными.
Схема динамического торможения, при котором ДПТНВ имеет такую характеристику, приведена на рис. 4.2. (она может называться также схемой генератора, работающего на автономную нагрузку 
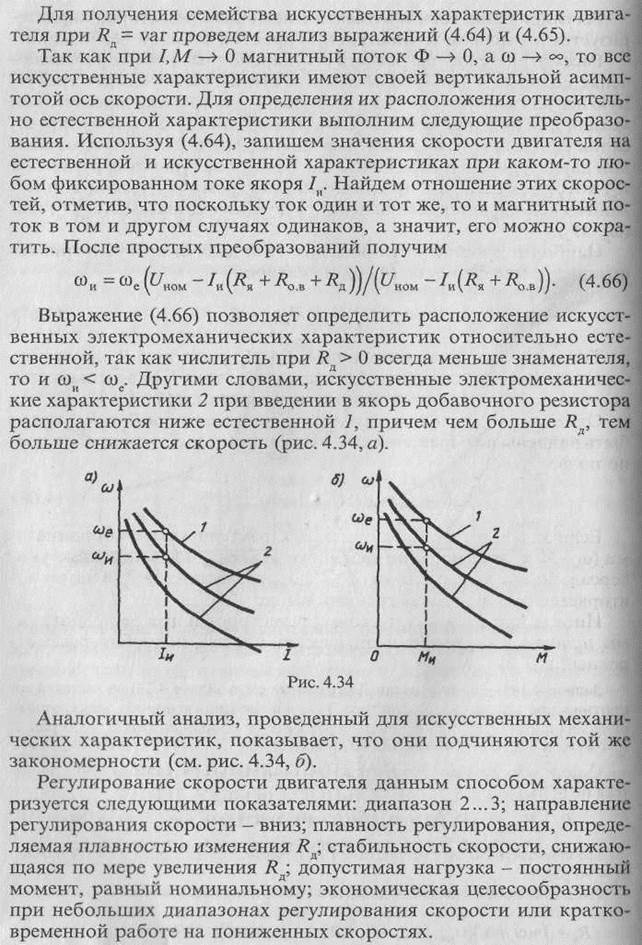
 Выражения (4.4) и (4.5) позволяют назвать основные способы реализации искусственных характеристик ДПТНВ, используемых для регулирования координат ЭП. К ним относятся изменение сопротивления добавочного резистора в цепи якоря
Выражения (4.4) и (4.5) позволяют назвать основные способы реализации искусственных характеристик ДПТНВ, используемых для регулирования координат ЭП. К ним относятся изменение сопротивления добавочного резистора в цепи якоря  магнитного потока Ф и подводимого к якорю напряжения U. Отметим, что значения входящих в эти выражения тока и момента определяются только механической нагрузкой двигателя
магнитного потока Ф и подводимого к якорю напряжения U. Отметим, что значения входящих в эти выражения тока и момента определяются только механической нагрузкой двигателя  и не могут быть установлены произвольно.
и не могут быть установлены произвольно.
|


|

|
|
|

|


|


|
|


|
|

|

|

|

|

|
|

|

|
|
|
|
|

|

|

|

|

|
|

|
|


|
|

|
|