РАСЧЕТНО – ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
по теории механизмов и машин
Тема работы:
“Исследование плоского шарнирно-рычажного механизма”
| Задание № 1 Вариант № 2 |
| Выполнил: студент гр. 062122 Донюшкин Д.А Руководитель: Долгушин В.А. |
Пушкин, 2016 г.
Оглавление
1.Структурный анализ механизма. 3
Схема заданного механизма. 3
1.2 Определение степени подвижности механизма. 4
1.3 Разложение механизма на структурные группы Ассура, определение их классов, порядка и вида. 4
1.4 Определение формулы строения механизма, его класса и порядка. 4
2. Кинематическое исследование механихма. 4
2.1 Планы положения механизма. 4
2.2 План скоростей механизма. 5
2.3 Планы ускорений механизма. 7
2.4 Диаграммы перемещений и скоростей ползуна. 10
Структурный анализ механизма
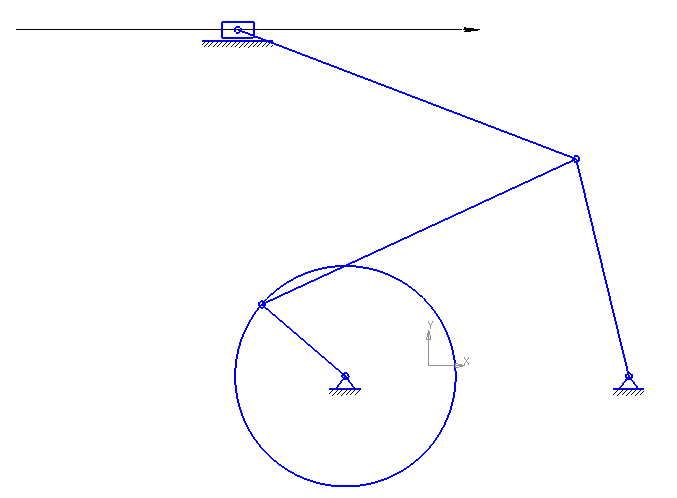
Рис. 1
Схема заданного механизма
| Параметры | Букв. обозначение | Величина |
| Длина крив. “1”, м | L1 | 0.07 |
| Длина шатуна “2”, м | L2 | 0.22 |
| Длина звена “3”, м | L3 | 0.14 |
| Длина шатуна “4”, м | L4 | 0.23 |
| Размер “b”, м | b | 0.18 |
| Размер “a”, м | a | 0.22 |
| Угл. скор., (рад/с) | ω | 5.4 |
| Массы звеньев (кг) | m2 | 2.1 |
| m3 | 1.3 | |
| m4 | 2.2 | |
| m5 | 1.7 | |
| Момент инерции звеньев (кг.м2) | IS2 | 0.02 |
| IS3 | 0.005 | |
| IS4 | 0.023 | |
| Максимальная сила сопротивления (Н) | Pmax | |
| № положения для силового расчета | – | |
| Коэф. неравномер. | δ | 0.12 |
Определение степени подвижности механизма
Степень подвижности механизма определяется по формуле Чебышева:
W=3n-2p5-P4
где: n – число подвижных звеньев;
P5 – число кинематических пар 5-го класса;
P4 – число кинематических пар 4-го класса;
Степень подвижности заданного механизма равна:
W=3*5-2*7-0=1
Значит, для однозначного определения положения всех звеньев достаточно знать положение только одного звена механизма.
Разложение механизма на структурные группы Ассура, определение их классов, порядка и вида.
Из представленной схемы видно, что механизм состоит из механизма 1-го класса (звенья 0 и 1) и присоединенных к нему двух групп Ассура второго класса второго порядка.
Определение формулы строения механизма, его класса и порядка
Формулы строения механизма имеет вид:
II 1 (2,3) II 2 (4,5)
I (0,1)
Класс и порядок механизма определяется по наивысшему классу группы Ассура, которая входит в его состав. Значит данный механизм второго класса второго порядка.
Кинематическое исследование механизма
Планы положения механизма
Планы 8 положений механизма изображаются на первом листе чертежа курсовой работы. Они нужны для того чтобы:
а) показать положения всех звеньев механизма в различные моменты времени;
б) определить ход ползуна;
в) определить угол размаха коромысла;
г) показать траекторию движения какой – либо точки. В данном задании – траекторию движения центра масс шатуна 4 (точка S4).
Построение проводим в масштабе. Под масштабом понимают отношение действительной длины звена в метрах, к длине звена на чертеже в мм, например: 
 ; длина кривошипа на чертеже должна быть (l1)=40-70 мм
; длина кривошипа на чертеже должна быть (l1)=40-70 мм
Принимаем в нашем случае (l1)=70 мм. Тогда масштаб длин будет:
ϻl=  =0.001
=0.001
Теперь можно определить все остальные размеры на чертеже по формуле:
(li)=  [мм]
[мм]
Эти размеры будут:
(b)=  =180[мм]
=180[мм]
(l2)=  =220[мм]
=220[мм]
(l3)=  =140[мм]
=140[мм]
(l4)=  =230[мм]
=230[мм]
(a)= =220[мм]
Далее чертим план механизма в 8 положениях, используя расчетные длины и расстояния. Затем строим предельные положения механизма и определяем ход ползуна HE (в метрах) и угол размаха коромысла ɣ (в градусах).
HE=(HE)*ϻ [м]
План скоростей механизма
Планы скоростей механизма изображаются на первом листе чертежа. Они нужны для того, чтобы:
а) определить величину и направление скорости в любой точки механизма в различные моменты времени;
б) определить угловые скорости звеньев в различные моменты времени.
Построение планов скоростей проводим в соответствии с формулой, известной из теоретической механики:
Vабс=Vпер+Vотн
где: Vабс – абсолютная скорость точки;
Vпер – переносная скорость выбранного полюса;
Vотн –скорость точки относительно выбранного полюса;
Для того чтобы начертить планы скоростей, сначала нужно вычислить скорость точки В кривошипа АВ. Эту скорость определяем по формуле:
VB=ω1*lАВ 
где: VB – модуль скорости точки В;
ω1 – заданная угловая скорость движения кривошипа, ω1 =5,4  ;
;
lАВ – заданная длина кривошипа (в метрах) lАВ = 0,07 м.
В нашем случае:
VB=5,4*0,07=0,378
Эту скорость показываем на чертеже в виде вектора, перпендикулярного кривошипу АВ и имеющего длину (pb)=(40-60) мм. Принимаем (pb)=60 мм.
Тогда масштаб будущего плана скоростей ϻv будет:
ϻv=  =
=  =0.0063
=0.0063 
Для определения скорости точки С записываем векторные уравнения вида (1):
VС=VB+V CB
VС=VD+VCD (2)
Для определения скорости точки Е – аналогичные векторные уравнения:
VE=VC+V CE
VE=VE0+VEE0 (3)
Далее строим планы скоростей для каждого положения механизма, используя в каждом из них вектор VB и векторные уравнения (2) и (3). После построения всех 8 планов скоростей определяем величины всех характерных точек механизма, используя формулу:
Vi=(Vi)*ϻv
где: (Vi) – длина вектора скорости характерной точки на плане скоростей;
ϻv – масштаб плана скоростей, вычисленный ранее.
Угловые скорости вращательного движения звеньев 2,3,4 можно рассчитать по формуле:
ωi=  ,
, 
где: Vотн – относительная скорость, полученная из планов скоростей, ;
li – длина соответствующего звена, [м].
Результаты вычислений Vi и ωi сводим в таблицу 1.
Таблица 1. Значение скоростей точек и угловых скоростей звеньев.
| Положения механизма | ||||||||
| Скорости | ||||||||
| VB (м/с) | 0,38 | 0,38 | 0,38 | 0,38 | 0,38 | 0,38 | 0,38 | 0,38 |
| VЕ (м/с) | 0,53 | 0,32 | 0,43 | 0,32 | 0,13 | 0,13 | 0,56 | |
| VС (м/с) | 0,48 | 0,28 | 0,41 | 0,36 | 0,21 | 0,21 | 0,59 | |
| VСВ (м/с) | 0,76 | 0,12 | 0,09 | 0,21 | 0,33 | 0,38 | 0,21 | 0,37 |
| VЕС (м/с) | 0,29 | 0,18 | 0,09 | 0,08 | 0,11 | 0,12 | 0,8 | |
| VСD (м/с) | 0,48 | 0,28 | 0,41 | 0,36 | 0,21 | 0,21 | 0,59 | |
| VS1 (м/с) | 0,13 | 0,13 | 0,13 | 0,13 | 0,13 | 0,13 | 0,13 | 0,13 |
| VS2 (м/с) | 0,21 | 0,33 | 0,39 | 0,35 | 0,25 | 0,29 | 0,46 | |
| VS3 (м/с) | 0,24 | 0,14 | 0,2 | 0,18 | 0,1 | 0,11 | 0,3 | |
| VS4 (м/с) | 0,49 | 0,28 | 0,42 | 0,34 | 0,16 | 0,16 | 0,57 | |
| ω2 (1/с) | 3,44 | 0,49 | 0,4 | 0,95 | 1,5 | 1,72 | 0,97 | 1,69 |
| ω3 (1/с) | 3,42 | 2,03 | 2,93 | 2,57 | 1,5 | 1,53 | 4,23 | |
| ω4 (1/с) | 1,26 | 0,77 | 0,38 | 0,33 | 0,47 | 0,52 | 0,33 |
Планы ускорений механизма
Планы ускорений механизма изображаем на первом листе чертежа. Они нужны для того, чтобы:
а) определить величину и направление ускорения в любой точки механизма в различные моменты времени;
б) определить угловые ускорения звеньев в различные моменты времени.
Построение планов ускорений проводим в соответствии с формулами известными из теоретической механики:
aабс=aпер+aотн , (4)
где:
aотн=an+at – если относительное движение является вращательным; (5)
aотн=ak+ar – если в относительном движении одним из составляющих является поступательное движение (кулиса). (6)
В этих формулах:
aабс – абсолютное ускорение точки;
aотн – полное относительное ускорение точки;
an=  - нормальное относительное движение точки; (7)
- нормальное относительное движение точки; (7)
at – тангенциальное относительное ускорение точки;
ak=2*ωкул* Vотн – ускорение Кориолиса; (8)
ar – относительное ускорение точки вдоль оси кулисы;
Для того, чтобы изобразить планы ускорений сначала нужно вычислить ускорение точки В кривошипа АВ. Это ускорение определяем по формуле:
aB=ω12*lАВ 
где: aB – модуль ускорения точки В;
ω1 – заданная угловая скорость движения кривошипа, ;
lАВ – заданная длина кривошипа (в метрах).
В нашем случае: aB=5,42*0,07=2,0412
Это ускорение показываем на чертеже в виде вектора, параллельного кривошипу АВ и имеющего длину (pb)=(40-60) мм. Принимаем (pb)=60 мм.
Тогда масштаб будущего плана ускорений ϻa будет:
ϻa=  =
=  =0.03402
=0.03402 
Для определения ускорения точки С записываем векторные уравнения вида:
aС=aB+anCB+ arCB
aD=aD+ anCD+ arCD
Для определения ускорения точки Е – аналогичные векторные уравнения:
aE=aC+anCE+ arCE
aE=aE0+aEE0
Вычисляем нормальное ускорение точки С в относительном движении вокруг точки В по формуле (7). anCB= 

Вычисляем длину отрезка, изображающего это ускорение на чертеже (n2).
(n2)=  ,[мм]
,[мм]
Вычисляем нормальное ускорение точки Е в относительном движении вокруг точки С по формуле (7). anCE = 
Вычисляем длину отрезка, изображающего это ускорение на чертеже (n4).
(n4)=  ,[мм]
,[мм]
Аналогичные операции проводим для всех 8 положений механизма, результаты заносим в таблицу 2.
| Полож.мех | ||||||||
| anCВ | 2,6 | 0,052 | 0,03 | 0,196 | 0,49 | 0,65 | 0,2 | 0,63 |
| (n2) | 1,5 | 5,7 | 14,3 | 19,3 | 6,08 | 18,47 | ||
| anCD | 1,6 | 0,57 | 1,19 | 0,9 | 0,31 | 0,33 | 2,51 | |
| (n3) | 16,8 | 9,1 | 9,6 | 73,6 | ||||
| anCE | 0,3 | 0,14 | 0,03 | 0,025 | 0,05 | 0,062 | 0,025 | |
| (n4) | 3,9 | 0,98 | 0,73 | 1,49 | 1,83 | 0,73 |
Таблица 2
Далее строим планы ускорений для 8 положений механизма в соответствии с векторными уравнениями 4-6, используя данные таблицы 2.
После их построения определяем величину ускорения всех характерных точек механизма(абсолютные и относительные), используя формулу:
ai=(ai)*ϻa
где: ai – действительное ускорение данной точки (абсолютное или относительное)
(ai) – длина вектора ускорения данной точки на плане ускорений;
ϻa – масштаб плана ускорений.
Угловые скорости вращательного движения звеньев 2,3,4 можно рассчитать по формуле:
ɛi=  ,
, 
где: atотн – относительное ускорение, полученное из плана ускорений, ;
li – длина соответствующего звена, [м].
Результаты вычислений ai и ɛi сводим в сводную таблицу 3.
Таблица 3. Значения ускорений точек и угловых ускорений звеньев.
| Положения механизма | ||||||||
| Ускорения | ||||||||
| aB | 2,0412 | 2,0412 | 2,0412 | 2,0412 | 2,0412 | 2,0412 | 2,0412 | 2,0412 |
| anCВ | 2,6 | 0,052 | 0,035 | 0,196 | 0,49 | 0,65 | 0,207 | 0,63 |
| atCВ | 4,35 | 2,31 | 0,92 | 1,39 | 1,02 | 0,17 | 5,9 | |
| aCВ | 5,07 | 2,31 | 0,92 | 1,39 | 1,1 | 0,6 | 5,9 | |
| aS2 | 4,42 | 1,8 | 1,6 | 2,14 | 1,56 | 1,7 | 1,77 | 0,95 |
| anCD | 1,64 | 0,57 | 1,198 | 0,921 | 0,31 | 0,33 | 2,51 | |
| atCD | 6,74 | 2,2 | 0,02 | 2,28 | 1,2 | 1,39 | 2,96 | |
| aCD | 6,94 | 2,25 | 1,2 | 2,48 | 1,2 | 1,39 | 3,9 | |
| aS3 | 3,47 | 1,12 | 0,59 | 1,24 | 0,6 | 0,7 | 1,02 | 1,94 |
| anCE | 0,37 | 0,14 | 0,033 | 0,025 | 0,05 | 0,062 | 0,025 | |
| atCE | 2,35 | 0,85 | 1,2 | 0,48 | 0,6 | 0,6 | 1,12 | 2,25 |
| aCE | 2,38 | 0,85 | 1,2 | 0,48 | 0,6 | 0,9 | 1,12 | 2,25 |
| aS4 | 2,35 | 0,5 | 2,5 | 0,95 | 0,99 | 1,56 | 3,81 | |
| aE=aS5 | 7,28 | 2,52 | 0,17 | 2,59 | 0,78 | 0,7 | 1,26 | 4,05 |
| ɛ2 | 19,77 | 10,5 | 4,18 | 6,3 | 4,6 | 0,77 | 9,09 | 26,82 |
| ɛ3 | 48,14 | 15,71 | 0,14 | 16,3 | 8,6 | 9,93 | 14,3 | 21,14 |
| ɛ4 | 10,22 | 3,7 | 5,2 | 2,1 | 2,6 | 3,9 | 4,9 | 9,78 |
Диаграммы перемещений и скоростей ползуна.
Кинематические диаграммы – это графическое изображение перемещений, скоростей и ускорений отдельных точек механизма как функций времени или угла поворота кривошипа:
S=S(t), V=V(t)
или S=S(ϕ) V=V(ϕ)
Если построены планы 8 положений механизма, то можно построить кривую S(t), а затем, используя приемы графического дифференцирования, построить кривую V(t).
Порядок построения:
1. Проводим оси кинематических диаграмм.
2. Откладываем на оси времени отрезок l=(150-200) мм, соответствующий времени одного полного оборота кривошипа. Принимаем l=180 мм. При этом масштаб времени будет:
ϻv=  =
=  =
= 

3. Масштаб перемещений ϻs принимаем равным или кратным масштабу ϻl плана положений механизма.
4. Строим диаграмму перемещений ползуна S= S(ϕ), используя планы положений механизма.
5. Для того, чтобы отрезки на оси ординат были равны отрезкам на планах скоростей, построенных ранее, необходимо найти полюсное расстояние Hv. Вычисляем его по формуле:
Hv=  [мм]
[мм]
где: ϻv – масштаб планов скоростей, построенных ранее.
6. Строим диаграмму скоростей ползуна V=V(ϕ),используя приемы графического дифференцирования (метод хорд).
7. Вычисляем полюсное расстояния Ha по аналогичной формуле