Моделирование и идентификация динамических систем
Моделирование линейной динамической системы
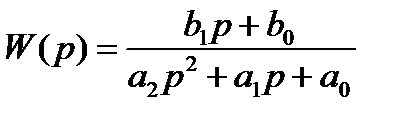
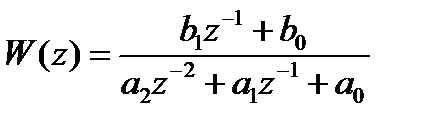
Линейная динамическая система задана в виде передаточной функции:
непрерывная система: дискретная система:
| W(p) |
| u (t) |
| y (t) |
| W(z) |
| u (k) |
| y (k) |
· t – непрерывное время,  -заданный интервал времени
-заданный интервал времени
· k – номер дискретного момента времени,  - дискретный момент времени,
- дискретный момент времени,  - шаг по времени (период дискретизации)
- шаг по времени (период дискретизации)
· u (t) – непрерывный, u (k) – дискретный входной сигнал (управление)
· y (t) – непрерывный, y (k) – дискретный выходной сигнал (реакция системы)
· W(p) – передаточная функция в непрерывном и W(z) – дискретном случае
·  – оператор дифференцирования,
– оператор дифференцирования,  ,
, 
·  - оператор запаздывания (смещения),
- оператор запаздывания (смещения),  ,
,  ,
,
 ,
, 
Уравнение непрерывной линейной динамической системы 2-го порядка:

· u (t) – вход системы (управление)
· y (t) – выход системы (реакция)
·  – время
– время
Задача моделирования: найти значения выхода системы y (t) на временном диапазоне при заданных параметрам системы  и заданном управлении u (t).
и заданном управлении u (t).
Решение задачи моделирования:
Переход к дискретному представлению:
·  ,
,  - дискретный момент времени, k – номер дискретного момента времени, - шаг по времени (период дискретизации)
- дискретный момент времени, k – номер дискретного момента времени, - шаг по времени (период дискретизации)
·  ,
,  ,
,
·  ,
, 
· 

Приводим подобные

Оставляем в левой части 

Регрессионное уравнение для моделирования

·  ,
,  ,
,  ,
, 
Для моделирования необходимо задать начальные условия  ,
,  - числа.
- числа.
Аналогично для дискретной системы 2-го порядка

где - оператор запаздывания (смещения),  ,
, 
 ,
,  , регрессионное уравнение примет вид:
, регрессионное уравнение примет вид:


Идентификация линейной динамической системы
Задача идентификации: найти значения выбранных параметров системы (из набора ) используя данные о входе u (t) и выходе y (t) системы на временном диапазоне
Решение задачи идентификации:
Пример: пусть требуется найти значения параметров  для непрерывной системы.
для непрерывной системы.
Уравнение системы записывается в линейно-регрессионном виде - все слагаемые уравнения содержащие неизвестные параметры записываются в правой части уравнения, все остальное – в левой части:
из получаем:

Приводим в дискретный вид:

где  ,
, 

Для расчета дискретной производной 2-го порядка нам потребуется значения функций с запаздыванием на 2 шага. Соответственно выборка данных сократиться на 2 шага и мы будем рассматривать временной диапазон значений  .
.
Все что в левой части обозначаем как 
Правую часть записываем в виде:  , где
, где  - искомые параметры,
- искомые параметры, 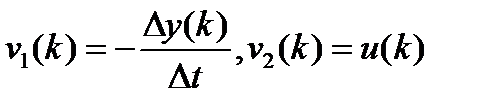 - регрессионные переменные (знак относится к переменной а не к параметру).
- регрессионные переменные (знак относится к переменной а не к параметру).
Получившееся регрессионное уравнение имеет вид

где  - вектор параметров,
- вектор параметров,  - вектор регрессионных переменных.
- вектор регрессионных переменных.
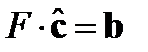
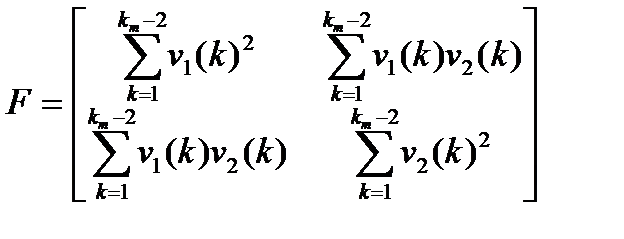
Схема МНК-идентификации данного регрессионного уравнения имеет вид:
 - вектор искомых параметров системы.
- вектор искомых параметров системы.
Решение данной системы записывается в виде:
 ,
,
где  - обратная матрица к
- обратная матрица к  .
.
Аналогично для дискретной системы 2-го порядка
Регрессионное уравнение:

где 
Правую часть записываем в виде:, где - искомые параметры, 
Задания:
1. Задана передаточная функция  , период времени , период дискретизации
, период времени , период дискретизации  и входной сигнал
и входной сигнал  (указаны в таблице вариантов заданий). Провести численное моделирование выходного сигнала
(указаны в таблице вариантов заданий). Провести численное моделирование выходного сигнала  и построить графики
и построить графики  и
и  .
.
2. По результатам предыдущего задания построить схему МНК-идентификации неизвестных параметров (указаны в таблице вариантов заданий)
Таблица вариантов заданий:
| A | B | |
| 
| |
 входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации: 
|  входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации: 
| |
входной сигнал: II,
неизвестные при идентификации: 
|  входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации:
| |
 входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации:
|  входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации: 
| |
 входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации: 
|  входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации: 
| |
 входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации:
|  входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации:
| |
 входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации:
|  входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации:
| |
 входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации:
|  входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации:
| |
 входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации:
|  входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации:
| |
 входной сигнал: I,
входной сигнал: I,  неизвестные при идентификации:
неизвестные при идентификации:
|  входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации:
| |
|
входной сигнал: II,
неизвестные при идентификации:
|  входной сигнал: II,
неизвестные при идентификации:
входной сигнал: II,
неизвестные при идентификации:
|
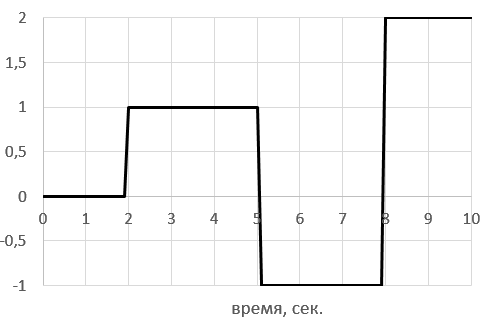
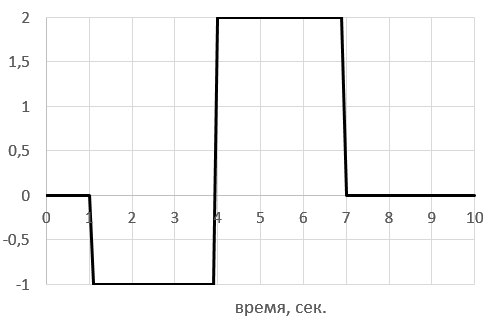
Входные сигналы:
| I | II |
| 
|