Схема наклонного ленточного конвейера представлена на рис. 1. Несущим и тяговым элементом конвейера является бесконечная, замкнутая лента 4, движущаяся по поддерживающим роликовым опорам 5. Движение конвейеру сообщается от электродвигателя 1, через плоскоременную передачу 2 на приводной барабан 3. Замкнутая тканевая прорезиненная лента 4 натянута между приводным и натяжным барабанами. Натяжной барабан 6 снабжен винтовыми натяжными станциями 7, в которых вращательное движение винтов превращается в поступательное движение ползунов, в которых расположены опоры натяжного барабана. Нормальное натяжение ленты необходимо для сцепления ленты с барабаном и создания сил трения необходимого для работы конвейера.
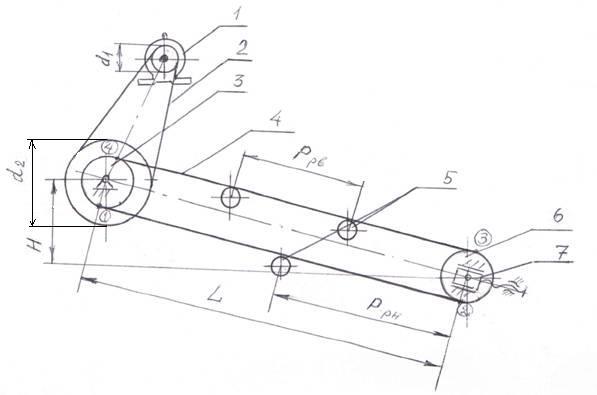
Рис. 1. Схема наклонного ленточного конвейера
Груз перемещается по верхней ветви конвейера, а нижняя часть – холостая, возвратная. Изучаемый ленточный конвейер предназначен для перемещения сыпучего груза, поэтому лента на рабочей ветви имеет форму желоба.
Форма ленты получается путем расположения под ней трёхроликовой опоры, в которой крайние поддерживающие ролики располагаются под углом (рис. 2). Холостая ветвь прямая, поддерживается прямым роликом.
Груз перемещается снизу наверх. В данной работе конвейер работает вхолостую. Поэтому мощность расходуется только на преодоление внутренних вредных сопротивлений: трения скольжения (качения) в опорах, поддерживающих роликовые опоры, трения ленты по роликам при ее движении, сопротивления от перегиба ленты при ее набегании на приводной и натяжной барабаны, трения скольжения (качения) в подшипниках барабанов и др.
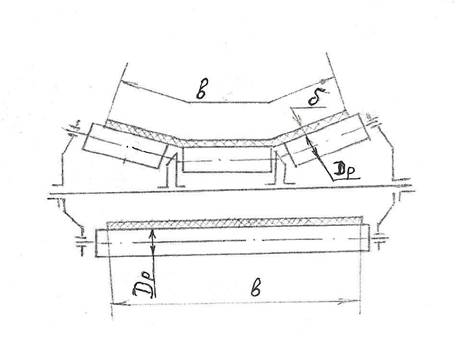
Рис. 2. Схема расположения роликовых опор
|
|
Расчет ленточного конвейера производится по «методу обхода контура конвейера по точкам» (рис. 1). Для этого разбиваем трассу конвейера характерными точками на прямолинейные и криволинейные участки (рис. 1).
Характерным точкам присваиваем номера от 1 до 4. Точка 1 принимается на сбегающей ветви приводного барабана, далее точки номеруем по направлению движения ленты. Минимальное натяжение ленты принимается в характерной точке 1.
Принимаем минимальное натяжение ленты:
F1 = 1000, Н.
Натяжение ленты в точке 2:
F2= F1 + F1-2, где:
F1-2 – сила сопротивления движению ленты на участке 1-2.
Так как конвейер наклонный, рассматриваем две составляющие силы и получаем:
F1-2 = (qЛ + qрн) ∙L∙ωЛ – qЛ∙H, где:
qЛ = 0,011 ∙ b ∙ δ – сила тяжести 1м ленты конвейера, Н/м;
В – ширина ленты, мм;
δл –толщина ленты, мм;
δл = δоί + δ1 + δ2;
δо = 1,0 – толщина прокладки, мм;
ί = 3 – количество прокладок в ленте;
δ1 = δ2 = 1,5 – толщина резиновых обкладок, мм;
qрн– сила тяжести роликов нижних на холостой ветви конвейера, приходящаяся на 1 м конвейера, Н/м;
qрн = mрн∙g/ ррн, где:
mрн –масса роликанижнего, кг;
g – ускорение свободного падения, м/сек2;
ррн – расстояние междуроликоопорами в нижней, холостой ветви, м;
ω л – коэффициент сопротивления движению ленты по роликоопорам;
ω л = 0,02 … 0,04 [1, стр. 48];
L – длина конвейера, м;
H – высота подъема конвейера, м.
В точке 3 натяжение ленты будет:
F3 = F2∙ ζ1, где:
ζ1 – коэффициент сопротивления на ролике (барабане) при углах обхвата 1800 и более, ζ1 = 1,05 … 1,1.
В точке 4 натяжение ленты будет:
F4 = F3 + F3-4, где:
|
|
F3-4 – сила сопротивления движению ленты на участке 3-4.
F3-4 = (qЛ + qрв) ∙L∙ω л + qЛ∙H, где:
qрв – сила тяжести роликов верхних на рабочей ветви конвейера, приходящаяся на 1 м конвейера, Н/м;
qрв = 3 ∙mрв∙g/ррв, где:
mрв –масса одного ролика верхнего, кг; вроликоопоре верхней стоят 3 ролика.
ррв – расстояние междуроликовыми опорами в верхней (рабочей) ветви, м.
Окружное (тяговое) усилие на приводном барабане конвейера определяем:
Ft = F4∙ ζ1 - F1, где:
ζ1= 1,08 … 1,1 – коэффициент сопротивления движению ленты при обхвате приводного барабана [1, стр. 50].
Потребная мощность на приводном барабане:
Pб = Ft∙νл/103, кВт.
νл – скорость ленты, м/с;
νл = (2 ∙L+ π ∙Dпр)/t, где:
L – длина конвейера, м;
Dпр – диаметр приводного барабана, мм;
t –время одного пробега ленты, с
или для определения скорости ленты можно воспользоваться формулой [1, стр. 50]:
νл = π ∙Dпр∙nб/60 ∙ 103, где:
nб – частота вращения приводного барабана, 1/мин;
nб = nэл/uрем, uрем = d2 / d1, где:
d2 – диаметр ведомого шкива ременной передачи, мм;
d1 – диаметр ведущего шкива ременной передачи, мм.
Потребная мощность электродвигателя (потребляемая) [1, стр. 17]:
Pэл = к ∙Pб/ηпр, где:
ηпр – КПД привода конвейера.
В нашем случае ηпр = ηрем, где:
ηрем – КПД ременной передачи,
ηрем = 0,98,
к =1,25 … 1,5 – коэффициент запаса мощности.
Порядок выполнения работы
1. Уяснить цель и содержание работы, ее теоретические основы и методику проведения.
2. Ознакомиться с устройством и работой ленточного конвейера и указать его основные элементы в бланке лабораторной работы.
|
|
3. Выполнить замер основных параметров:
- конвейера: его длины, ширины, числа прокладок, толщины ленты, диаметра приводного барабана, диаметра ролика, массы ролика: верхнего, нижнего; расстояния между роликами: на рабочей ветви и на холостой ветви; высоты подъема; частоты вращения приводного барабана; показаний ваттметра, показывающие потребляемую мощность; времени одного пробега ленты.
- электродвигателя: его мощности и частоты вращения;
- ременной передачи: диаметра ведущего шкива, диаметра ведомого шкива;