Контрольная работа
По дисциплине
«Введение в профессию»
Вариант
Выполнил: Студент: 1 курса Кромин М.С Направление: 15.03.04(2) Шифр: 485177 Работа сдана на проверку Преподаватель: Остапенко А.Е. Дата: Оценка______
Мелеуз – 2019
Содержание
Введение
1. Усилительные, исполнительные элементы в составе систем автоматического регулирования и управления.
2. Специфика отраслей пищевой промышленности с точки зрения их автоматизации.
Заключение
Список литературы
Введение
Современного человека окружают самые разнообразные предметы, созданные для удовлетворения его многочисленных потребностей. Вся эта созданная людьми технологическая среда носит название "промышленная собственность", что позволяет нам определить технологию, как процесс удовлетворения человеческих нужд с помощью искусственно созданных материальных объектов", а любая технологическая система является конкретным представителем этого искусственного мира.
Комплексное технологическое образование подразумевает рассмотрение технологии, как процесса постановки и решения проблемы, опирающегося на опыт и знания, учитывающего социальную значимость достигнутого результата
Как известно, любые технологии имеют тенденцию устаревать. Соответственно, устаревает и оборудование, которое является их воплощением. По имеющимся данным, за рубежом жизненный цикл систем автоматизации составляет около 10-15 лет, после чего, как правило, производится модернизация технического оборудования предприятия, в том числе и системы автоматизации технологических процессов. В России этот цикл составляет в среднем 15-20 лет.
Для того чтобы лучше представлять себе проблемы автоматизации, следует иметь в виду особенности технологических процессов пищевой промышленности, которые имеют:
· трубопроводный характер производства, предполагающий управление насосами, клапанами, дозаторами, а также контроль параметров жидких и сыпучих сред в транспортных магистралях и емкостях;
· специфические, не реализованные в стандартной измерительной аппаратуре методики расчета характеристик транспортируемых сред (например, расчет концентрации различных растворов при изменении их температуры).
Основной целью автоматизации технологических систем является повышение надежности, оперативности и качества управления этими системами.
Степень автоматизации технологических систем определяются составом технологического оборудования, технологическими задачами и подготовленностью объекта к автоматизации.
Усилительные, исполнительные элементы в составе систем автоматического регулирования и управления.
Исполнительные устройства — электромагниты с втяжным и поворотным якорями, электромагнитные муфты, а также электродвигатели, относящиеся к электромеханическим исполнительным элементам автоматических устройств.
Электромагниты преобразуют электрический сигнал в механическое движение; их применяют для перемещения рабочих органов, например клапанов, вентилей, золотников и т. п.
Электромагнитные муфты используются в электроприводах и устройствах управления для быстрого включения и выключения приводимого механизма, а также для его реверса, т.е. изменения направления движения управляемого устройства.
В некоторых случаях электромагнитные муфты применяют для регулирования скорости и ограничения передаваемого момента.
Электродвигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую и преодолевающее при этом значительное механическое сопротивление со стороны перемещаемых устройств. Одним из главных требований, предъявляемых к электродвигателям, является их способность развивать требуемую механическую мощность. Кроме того, электродвигатель должен обеспечивать реверс, а также движение объекта с заданными скоростями и ускорениями.
Наиболее широко в качестве электромеханических исполнительных элементов применяют электродвигатели постоянного и переменного тока.
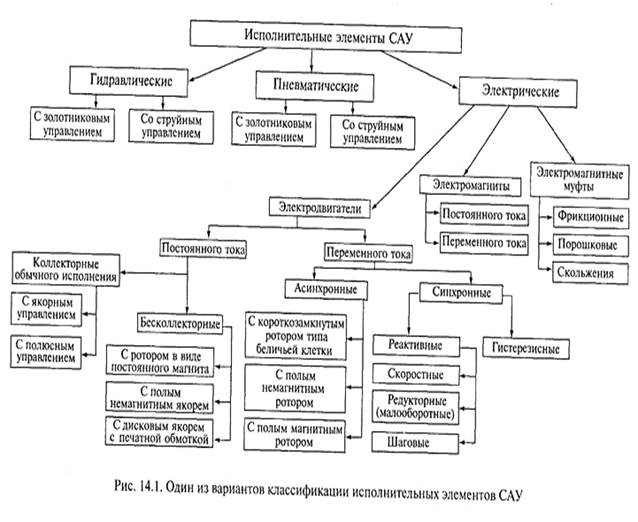
Исполнительные элементы (ИЭ) систем автоматики предназначены для создания управляющего воздействия на регулирующий орган (РО) объекта управления (ОУ). При этом изменяется положение или состояние РО, что приводит в конечном итоге к изменению положения или состояния ОУ в соответствии с алгоритмом управления.
Один из вариантов классификации исполнительных элементов САУ представлен на рис. 14.1.
Еще одним вариантом исполнительных элементов является следящий привод, который воспроизводит на выходе заданное на входе перемещение, но с большим механическим усилием, т.е. момент или сила на выходе его существенно больше, чем на входе. Следящий привод широко применяется в автоматических манипуляторах (роботах), станках с числовым программным управлением (ЧПУ), для управления прокатными станами, антеннами радиолокаторов, в космической и ракетной технике и т. д.
Исполнительный элемент (исполнительное устройство ) — функциональный элемент системы автоматического управления, осуществляющий воздействие на объект управления путем изменения потока энергии и потока материалов, поступающих на объект. Исполнительные элементы в основном бывают двух типов:
с механическим двигателем (в частности, сервомотор, серводвигатель или сервопривод), в этом случае исполнительный элемент производит механическое перемещение регулирующего органа;
с электрическим выходом, в этом случае воздействие, непосредственно прикладываемое к объекту регулирования, имеет электрическую природу.
Например, в регуляторе напряжения генератора постоянного тока регулирующим воздействием является напряжение возбуждения, получаемое от усилителя.
В зависимости от характера объекта и вида вспомогательной энергии, применяемой в системе автоматического управления, роль исполнительных элементов выполняют самые разные конструктивные элементы: электронные, электромашинные, магнитные или полупроводниковые усилители, реле, пневматические или гидравлические сервомоторы и др.
Динамические характеристики исполнительных элементов с механическим выходом отличаются значительно большей инерционностью, чем элементы с электрическим выходом. Часто исполнительные элементы второго типа служат приводом исполнительных элементов первого типа.
Сервоэлектродвигатели, применяемые в качестве исполнительных элементов с механическим выходом, отличаются специальным исполнением, обеспечивающим пониженную инерционность (удлиненным ротором малого диаметра, полым ротором). Значительно меньшую инерционность при той же мощности имеют гидравлические и пневматические серводвигатели.
Требования к исполнительным элементам определяются характеристиками объекта регулирования и требуемым качеством процесса регулирования.
Исполнительный механизм (сервопривод) — исполнительный элемент с механическим выходом. Исполнительные механизмы классифицируются по назначению и типу управляемых элементов, виду осуществляемых перемещений, роду применяемой энергии.
Исполнительные механизмы предназначаются для привода:
элементов, регулирующих потоки энергии, жидкости, газа, сыпучих и перемещаемых твердых тел (реостатов, клапанов, задвижек и заслонок, направляющих аппаратов турбин и насосов, шлагбаумов и других устройств);
элементов следящих систем (копировальных станков, манипуляторов, автокомпенсационных, регулирующих и других устройств);
рулевых устройств транспортных объектов;
особых элементов систем управления (противовесов в грузоподъемных сооружениях, зажимных автоматических устройств и т.п.).
К числу контрольных элементов исполнительных механизмов относятся:
механизм обратной связи, определяющий характеристику регулятора либо обеспечивающий передачу сигнала на дистанционный указатель положения исполнительного механизма;
концевые или путевые выключатели, которые останавливают исполнительный механизм в крайних, а иногда и промежуточных положениях (например, трехпозиционный исполнительный механизм), и концевые выключатели, в некоторых случаях выполняющие сигнальные функции;
измеритель вращающего момента на выходной оси исполнительного механизма, обеспечивающий выключение двигателя или его проскальзывание в специальной муфте после достижения предельно допустимого момента, что необходимо для получения запорного или зажимного действия исполнительно механизма или предохранения его от аварий в случае попадания под управляемое устройство посторонних предметов;
тормозное устройство при быстроходных двигателях для борьбы с инерцией в момент остановки;
защелка с выключателем главного соленоида и спускное расцепляющее устройство в исполнительном механизме с соленоидами большой мощности.
В большинстве электрических исполнительных механизмов мощность электродвигателей 10... 1000 Вт. Пневматические исполнительные механизмы работают при давлениях до 0,6 МПа, а гидравлические — до 3 МПа. В некоторых случаях мощность исполнительных механизмов достигает десятков киловатт, а давление — 10 МПа. Исполнительные механизмы обычно развивают на выходном валу вращающий момент от 1 до 100 Н • м при числе рабочих оборотов от 0,25 до 30 с-1 либо усилие от 100 до 5000 Н при ходе от 25 до 750 мм.
В приборах точной механики применяют исполнительные механизмы с меньшими вращающими моментами и переставляющими усилиями. Время перестановки устройства управляемого исполнительного механизма из одного крайнего положения в другое обычно находится в пределах 5... 120 с. Время перестановки более 120 с можно увеличить с помощью регуляторов прерывистого (шагового) действия, чтобы не усложнять чрезмерно редуктор. Время перестановки соленоидных, а также дозирующих и аварийных исполнительных механизмов доходит до долей секунд.
Исполнительный механизм электрический — исполнительный механизм, в котором перемещение регулирующего органа производится за счет электрической энергии. Электрические исполнительные механизмы бывают двух основных типов:
с приводом от электродвигателя (наиболее широко распространены в схемах общепромышленной автоматики);
с приводом от электромагнита (обычно соленоида).
В электрических исполнительных механизмах применяются асинхронные двигатели. Для исполнительных устройств малой мощности — двухфазные с короткозамкнутым или полым ротором, для более мощных — трехфазные с короткозамкнутым или массивным ротором. Для уменьшения выбега двигателя и улучшения качества регулирования используется электрическое торможение или электромагнитные тормоза, которые накладываются при снятии с двигателя напряжения питания.
Управление электрическим исполнительным механизмом с помощью соответствующих обратных связей можно построить так, чтобы перемещение регулирующего органа или скорость его движения изменялись пропорционально сигналу управления.
Конструктивно электродвигательные исполнительные механизмы выполняются, как правило, с вращательным движением выходного вала и реже с поступательным перемещением выходного штока. В системах общепромышленной автоматики для привода заслонок, кранов, шиберов и других устройств наиболее часто применяются однооборотные электрические исполнительные механизмы, в которых поворот выходного вала составляет 120... 170°. С помощью многооборотных электрических исполнительных механизмов обычно перемещаются такие регулирующие органы, как запорные вентили и задвижки.