Специальность
Техническое обслуживание и ремонт автомобильного транспорта
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ДЛЯ ВЫПОЛНЕНИЯ ПРАКТИЧЕСКИХ РАБОТ
Дисциплина Техническая механика
Преподаватель Хазиахметова Л.Н.
Содержание
| Практическая работа №1 Тема «Плоская система сходящихся сил», «Пространственная система сил» | |
| Практическая работа №2 Тема «Общие сведения о передаточных механизмах. Кинематические схемы» | |
| Практическая работа №3 Темы «Критерии работоспособности и основы расчетов механизмов» |
Практическая работа №1
Статика
Тема: Плоская система сходящихся сил.
Цель: Познакомиться с понятием равновесие, со случаями сходящихся сил в плоскости. Установить зависимость проекции сил на ость от угла. Научится определять нагрузку в сходящихся стержнях графическим и аналитическим методом.
Задание 1
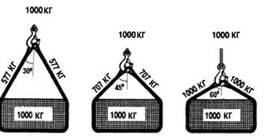
1. Зарисовать. Перевести заданные величины в систему СИ (1Т ≈10кН)
2. Какой угол называют углом стрововки (горизонталь, вертикаль)?
3. Как зависит нагрузка на канаты от угла строповки (прямо- или обратно- пропорциональная зависимость)?
Задание 2
1 Построить силовые треугольники.
2 Как нагружен каждый стержень (растянут, сжат)? Сравнить с силой F.


|

|

Пример выполнения задания 2
Исходные данные: Системы стержней рисунок1,2, и 3, находятся в равновесии. 1) Построить силовые треугольник. 2) Определить, растянуты или сжаты стержни. 3)Проанализировать системы.
1) Строим силовые треугольники, для чего изображаем силу F и параллельно стержням 1 и 2 проводим линии так, чтобы образовался треугольник.
2) Выбираем направления сил так, чтобы силовой треугольник был замкнут. (по часовой или против часовой стрелки). Определяем растяжение или сжатие стержней. Рисунок 1а, 2а, 3а.
3) Определяем соотношение сторон треугольника.
Задание 3
Определить силы в стержнях кронштейна, составленных из сдвоенных стандартных уголков, удерживающих груз F. Сделать проверку графически. Установить, какой из стержней нагружен больше.
Таблица вариантов и схемы к заданию 3
| Вари ант | № схемы | F (кН) | Вари ант | № схемы | F (кН) | Вари ант | № схемы | F (кН) |
| 1 | 75 | 6 | 100 | 1 | 160 | |||
| 2 | 200 | 7 | 150 | 2 | 110 | |||
| 3 | 150 | 8 | 200 | 3 | 110 | |||
| 4 | 90 | 9 | 100 | 4 | 160 | |||
| 5 | 100 | 10 | 50 | 5 | 180 | |||
Пример выполнения задания 3 
1 Изображаем систему стержней, равновесие которой должно быть рассмотрено.
2 Освобождаем систему от связей и вместо них прикладываем реакции R1 и R2, указываем заданную силу F.
3 Определяем точку схода сил «О».
4 Проводим ось координат Х так, чтобы одна из неизвестных реакций лежала на ней. Ось Y, проводим перпендикулярно. Определяем углы между осями и силами.
5 Составляем уравнения равновесия

6 Определяем реакции
Знак минус показывает, что направление противоположно выбранному (т.е. стержень 2 сжат)
7 Проверку делаем графически. Выбираем масштаб.
От точки О вниз откладываем в масштабе F=100кН (10 делений), от найденной точки А, под углом 450 вверх откладываем R2 =89,66 (≈9 делений), получаем точку В. Замеряем отрезок ВО, который соответствует силе R1, данный отрезок составляет несколько больше чем 7 делений≈73кН, угол АОВ при замере ≈750.
Вывод: Проверка показала, что решение верное.
R1 =73,22кН (стержень растянут)
R2=89,66кН (стержень сжат) – более нагружен.
Задача имеет продолжение
Справочный материал к практической работе №1
| Значение Углов (градусы) | Sin | Cos | Tg | Ctg |
| 0,0000 0,0872 0,1736 0,2588 0,3420 0,4226 0,5000 0,5736 0,6428 0,7071 0,7660 0,8192 0,8660 0,9063 0,9397 0,9659 0,9846 0,9962 1,0000 | 1,0000 0,9962 0,9846 0,9659 0,9397 0,9063 0,8660 0,8192 0,7660 0,7071 0,6428 0,5736 0,5000 0,4226 0,3420 0,2588 0,1736 0,0872 0,0000 | 0,0000 0,0875 0,1763 0,2679 0,3640 0,4663 0,5774 0,7002 0,8391 1,0000 1,1918 1,4281 1,732 2,145 2,747 3,732 5,671 11,43 | 11,43 5,671 3,732 2,747 2,145 1,732 1,4281 1,1918 1,0000 0,8391 0,7002 0,5774 0,4663 0,3640 0,2679 0,1763 0,0875 0,0000 |
Практическая работа №2
Кинематика и динамика. Основы расчетов деталей машин.
Тема Общие сведения о передаточных механизмах. Кинематические схемы
Цель: Научится составлять и читать кинематические схемы. Проводить кинематические и силовые расчеты механических передач и простейших сборочных единиц.
Задание 1
Составить кинематическую схему привода по варианту. Определить передаточные числа механических передач, угловые скорости, частоты вращения, мощности и моменты на валах привода.
Варианты: 1, 6, 11
Привод элеватора состоит из электродвигателя, косозубой цилиндрической закрытой передачи, цепной передачи, муфты упругой, далее установлен элеватор.
| Вариант | |||
| Мощность Эл. двигателя Рэл.двиг (кВт) | 7,5 | 4,0 | 1,5 |
| Частота вращения вала ротора пэл.двиг (об/мин) | |||
| Число зубьев шестерни z1 | |||
| Число зубьев колеса z2 | |||
| Число зубьев ведущей звездочки z3 | |||
| Число зубьев ведомой звездочки z4 |
Варианты: 2. 7, 12
Привод скребкового конвейера состоит из электродвигатель – плоскоременной передача, цилиндрической косозубой закрытой передача, муфты упругой, далее скребковый конвейер
| Вариант | |||
| Мощность Эл. Двигателя Рэл.двиг (кВт) | 7,5 | 4,0 | 1,5 |
| Частота вращения вала ротора пэл.двиг (об/мин) | |||
| Диаметр ведущего шкива d1 (мм) | |||
| Диаметр ведущего шкива d2 (мм) | |||
| Число зубьев шестерни z1 | |||
| Число зубьев колеса z2 |
Варианты: 3. 8, 13 Привод ленточного конвейера состоит из электродвигателя, клиноременной передачи, цилиндрической косозубой закрытой передачи, муфта цепной и далее ленточный конвейер.
| Вариант | |||
| Мощность Эл. Двигателя Рэл.двиг (кВт) | 7,5 | 4,0 | 1,5 |
| Частота вращения вала ротора пэл.двиг (об/мин) | |||
| Диаметр ведущего шкива d1 (мм) | |||
| Диаметр ведущего шкива d2 (мм) | |||
| Число зубьев шестерни z1 | |||
| Число зубьев колеса z2 |
Варианты: 4, 9, 14 Привод к подъемнику, состоящего из электродвигателя, цилиндрической зубчатой передачи, закрытой червячной передачи, с нижним расположением червяка и далее подъемник.
| Вариант | |||
| Мощность Эл. Двигателя Рэл.двиг (кВт) | 7,5 | 4,0 | 1,5 |
| Частота вращения вала ротора пэл.двиг (об/мин) | |||
| Число зубьев шестерни z1 | |||
| Число зубьев колеса z2 | |||
| Число витков червяка z3 | |||
| Число зубьев черв. колеса z4 |
Варианты: 5, 10, 15 Привод к мешалке, состоящий из электродвигатель, клиноременной передачи, цилиндрической косозубой закрытой передачи, муфты упругой и далее мешалка.
| Вариант | |||
| Мощность Эл. Двигателя Рэл.двиг (кВт) | 7,5 | 4,0 | 1,5 |
| Частота вращения вала ротора пэл.двиг (об/мин) | |||
| Диаметр ведущего шкива d1 (мм) | |||
| Диаметр ведущего шкива d2 (мм) | |||
| Число зубьев шестерни z1 | |||
| Число зубьев колеса z2 |