4.1 Определение мощностей на валах привода
При передаче мощности от электродвигателя к выходному валу привода её потери в каждом звене определяются значениями КПД этих звеньев. Величина мощности на выходном валу привода  известна из формулы (1). Переходя последовательно от выходного вала к валу электродвигателя, можно определить мощность на каждом валу привода следующим образом:
известна из формулы (1). Переходя последовательно от выходного вала к валу электродвигателя, можно определить мощность на каждом валу привода следующим образом:
· для привода с кинематической схемой типа А или Б
 , (13)
, (13)
· для привода с кинематической схемой типа В или Г
 , (14)
, (14)
· далее, для одноступенчатого редуктора
 , (15)
, (15)
· для двухступенчатого редуктора
 , (16)
, (16)
 , (17)
, (17)
· для трёхступенчатого редуктора
 , (18)
, (18)
 , (19)
, (19)
 , (20)
, (20)
· наконец, для привода с кинематической схемой типа А или В
 , (21)
, (21)
· для привода с кинематической схемой типа Б или Г
 , (22)
, (22)
где  и
и  - КПД закрытой (редукторной) и открытой передачи того или иного вида, расположенной между рассматриваемыми валами привода.
- КПД закрытой (редукторной) и открытой передачи того или иного вида, расположенной между рассматриваемыми валами привода.
При этом значение  , рассчитанное по (21) или (22), должно с точностью до сотых долей совпадать с величиной
, рассчитанное по (21) или (22), должно с точностью до сотых долей совпадать с величиной  , полученной ранее согласно (5). Данное условие является первой проверкой правильности выполненных расчётов.
, полученной ранее согласно (5). Данное условие является первой проверкой правильности выполненных расчётов.
4.2. Определение круговых частот вращения валов привода
Расчет частот вращения валов начинают, исходя из того, что после выбора электродвигателя уже известна частота вращения его вала  . Частота вращения каждого последующего вала привода при переходе от вала электродвигателя к валу исполнительного звена можно рассчитать как частоту вращения предыдущего вала, делённую на передаточное отношение кинематической пары, расположенной между этими валами:
. Частота вращения каждого последующего вала привода при переходе от вала электродвигателя к валу исполнительного звена можно рассчитать как частоту вращения предыдущего вала, делённую на передаточное отношение кинематической пары, расположенной между этими валами:
· для привода с кинематической схемой типа А или В
 , (23)
, (23)
· для привода с кинематической схемой типа Б или Г
 , (24)
, (24)
· далее, для одноступенчатого редуктора
 , (25)
, (25)
· для двухступенчатого редуктора
 , (26)
, (26)
 , (27)
, (27)
· для трёхступенчатого редуктора
 , (28)
, (28)
 , (29)
, (29)
 , (30)
, (30)
· наконец, для привода с кинематической схемой типа А или В
 , (31)
, (31)
· для привода с кинематической схемой типа В или Г
 . (32)
. (32)
Частота вращения выходного вала привода, полученная в результате этого расчета по (31) или (32), должна совпадать с величиной  , определенной ранее по формуле (2) с точностью до сотых долей.Это условие является второй проверкой правильности выполненных расчётов.
, определенной ранее по формуле (2) с точностью до сотых долей.Это условие является второй проверкой правильности выполненных расчётов.
4.3. Определение вращающих моментов на валах привода
При известных значениях  и
и  вращающие моменты на валах привода определяют в соответствии с известной зависимостью
вращающие моменты на валах привода определяют в соответствии с известной зависимостью
 . (33)
. (33)
ПРИМЕРЫКИНЕМАТИЧЕСКИХ РАСЧЁТОВ
РАЗЛИЧНЫХ ТИПОВ ПРИВОДОВ МАШИН
Пример 5.1
Провести кинематический расчёт привода (рис. 2) цепного подвесного транспортёра, если известно, что окружная сила на тяговой звёздочке составляет  , частота её вращения равна
, частота её вращения равна  , а делительный диаметр
, а делительный диаметр  .
.

Рис. 2. Кинематическая схема привода
1. Заданная кинематическая схема привода относится к типу А. В состав привода входят: асинхронный электродвигатель серии АИР, две упругие компенсирующие муфты, одноступенчатый червячный редуктор и приводной вал с тяговой звёздочкой.
2. Уточняем характеристики исполнительного звена (выходного вала) привода. Так как  , т.е. известна, то рассчитываем лишь
, т.е. известна, то рассчитываем лишь  . Сначала по (4) определяем вращающий момент на выходном валу
. Сначала по (4) определяем вращающий момент на выходном валу
 .
.
Затем согласно (1) вычисляем требуемую мощность на выходе привода
 .
.
3. Общий КПД привода рассчитываем в соответствии с (6) с учетом данных табл. 5
 .
.
4. Согласно (5) определяем требуемую мощность электродвигателя
 .
.
5. По табл. 4 из условия (7) с учётом рекомендаций, приведённых в разделе 2 работы, выбираем электродвигатель типа АИР80А4 со следующими параметрами:  ;
;  ;
;  .
.
6. Рассчитываем общее передаточное отношение привода согласно (8)
 .
.
Т.к. в составе привода нет открытых механических передач, то в соответствии с (9) передаточное отношение редуктора
 .
.
Однако полученная величина  превышает максимально возможное для одноступенчатого червячного редуктора значение, равное 63 (табл. 7).
превышает максимально возможное для одноступенчатого червячного редуктора значение, равное 63 (табл. 7).
7. Тогда согласно рекомендаций раздела 3.2 работы выбираем, используя табл. 3, другой электродвигатель с той же мощностью, но с меньшей  , имеющий следующие параметры: тип электродвигателя АИР80В6,
, имеющий следующие параметры: тип электродвигателя АИР80В6,  ,
,  ,
,  , и после перерасчёта (п. 6) имеем
, и после перерасчёта (п. 6) имеем
 ,
,
удовлетворяющее рекомендациям табл. 7.
8. По формулам (I3, 15, 21) определяем мощности на валах привода
 ;
;
 ;
;
 ;
;
 .
.
Полученное значение  совпадает с величиной (см. п. 4 расчёта). Следовательно мощности на валах привода определены верно.
совпадает с величиной (см. п. 4 расчёта). Следовательно мощности на валах привода определены верно.
9. По формулам (23, 25, 31) рассчитываем круговые частоты вращения валов
 ;
;
 ;
;
 .
.
 .
.
Полученное значение  совпадает с требуемым в исходных данных. Следовательно круговые частоты вращения валов определены верно.
совпадает с требуемым в исходных данных. Следовательно круговые частоты вращения валов определены верно.
10. Значения  рассчитываем согласно (33)
рассчитываем согласно (33)
 ;
;
 ;
;
 ;
;
 .
.
Полученное значение  с точностью до 1% совпадает со значением этого параметра, рассчитанном в п. 2. Следовательно вращающие моменты на валах привода определены верно.
с точностью до 1% совпадает со значением этого параметра, рассчитанном в п. 2. Следовательно вращающие моменты на валах привода определены верно.
Пример 5.2
Провести кинематический расчёт привода (рис. 3) пластинчатого транспортёра, если известно, что окружное усилие на тяговых звёздочках приводного вала  , скорость тяговых цепей
, скорость тяговых цепей  , число зубьев тяговой звёздочки
, число зубьев тяговой звёздочки  , шаг тяговой цепи
, шаг тяговой цепи  .
.

Рис. 3. Кинематическая схема привода
1. Заданная кинематическая схема привода относится к типу Б. В состав привода входят: асинхронный электродвигатель серии АИР, клиноремённая передача, цилиндрический 2-х ступенчатый редуктор, имеющий развёрнутую схему, упругая компенсирующая муфта и приводной вал с двумя тяговыми звёздочками.
2. Уточняя характеристики исполнительного звена (выходного вала) привода, согласно (1…3) имеем
 ;
;
 ;
;
 .
.
3. Общий КПД привода рассчитываем в соответствии с (6) с учетом данных табл. 5
 .
.
4. Согласно (5) определяем требуемую мощность электродвигателя

5. По табл. 4 из условия (7) с учётом рекомендаций, приведённых в разделе 2 работы, выбираем электродвигатель типа АИР100S4 со следующими параметрами:  ;
;  ;
;  .
.
6. Рассчитываем общее передаточное отношение привода согласно (8)
 .
.
7. В соответствии с рекомендациями табл. 6 назначаем для открытой клиноремённой передачи  .Тогда согласно (9) имеем
.Тогда согласно (9) имеем
 ,
,
что соответствует рекомендуемым значениям  для заданного двухступенчатого редуктора с развёрнутой схемой (табл. 8).
для заданного двухступенчатого редуктора с развёрнутой схемой (табл. 8).
8. Далее, используя рекомендации, приведённые в табл. 8 для данного редуктора, определяем передаточные отношения его тихоходной и быстроходной ступеней
 ;
;
 .
.
9. По формулам (13, 16, 17, 22) определяем мощности на валах привода
 ;
;
 ;
;

 ;
;
 .
.
Полученное значение  совпадает с точностью до 0,4% с величиной
совпадает с точностью до 0,4% с величиной  (см. п. 4 расчёта). Следовательно мощности на валах привода определены верно.
(см. п. 4 расчёта). Следовательно мощности на валах привода определены верно.
10. По формулам (24, 26, 27, 31) рассчитываем круговые частоты вращения валов
 ;
;

 .
.
Полученное значение  совпадает с величиной этого параметра, рассчитанной в п. 2. Следовательно круговые частоты вращения валов определены верно.
совпадает с величиной этого параметра, рассчитанной в п. 2. Следовательно круговые частоты вращения валов определены верно.
11. Значения  рассчитываем согласно (33)
рассчитываем согласно (33)
 ;
;
 ;
;

 ;
;
 .
.
Для проверки вычисляем значение  по формуле (4)
по формуле (4)

Полученное значение с точностью до 0,1% совпадает со значением этого параметра, рассчитанном в п. 11. Следовательно вращающие моменты на валах привода определены верно.
Пример 5.3
Провести кинематический расчет привода (рис. 4) ленточного транспортёра, если известно, что скорость его ленты  ; вращающий момент на приводном барабане
; вращающий момент на приводном барабане  , а его диаметр
, а его диаметр  .
.
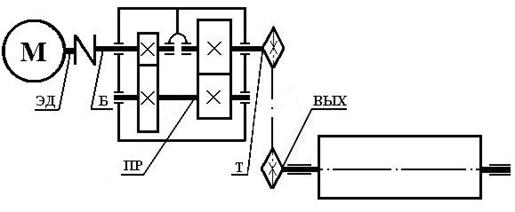
Рис. 4. Кинематическая схема привода
1. Заданная кинематическая схема привода относится к типу В. В состав привода входят: асинхронный электродвигатель серии АИР, упругая компесирующая муфта, цилиндрический 2-х ступенчатый редуктор, имеющий соосную схему, открытая цепная передача и приводной вал с барабаном.
2. Уточняя характеристики исполнительного звена (выходного вала) привода, согласно (1, 2) имеем


3. Общий КПД привода рассчитываем в соответствии с (6) с учетом данных табл. 5
 .
.
4. Согласно (5) определяем требуемую мощность электродвигателя

5. По табл. 4 из условия (7) с учётом рекомендаций, приведённых в разделе 2 работы, выбираем электродвигатель типа АИР90L4 со следующими параметрами:  ;
;  ;
;  .
.
6. Рассчитываем общее передаточное отношение привода согласно (8)
 .
.
7. В соответствии с рекомендациями табл. 6 назначаем для открытой цепной передачи  .Тогда согласно (9) имеем
.Тогда согласно (9) имеем
 ,
,
что соответствует рекомендуемым значениям  для заданного двухступенчатого соосного редуктора (табл. 8).
для заданного двухступенчатого соосного редуктора (табл. 8).
8. Далее, используя рекомендации, приведенные в табл. 8 для данного редуктора, определяем передаточные отношения его тихоходной и быстроходной ступеней
 ;
;
 .
.
9. По формулам (14, 16, 17, 21) определяем мощности на валах привода
 ;
;
 ;
;

 ;
;
 .
.
Полученное значение совпадает с точностью до 0,5% с величиной  (см. п. 4 расчёта). Следовательно мощности на валах привода определены верно.
(см. п. 4 расчёта). Следовательно мощности на валах привода определены верно.
10. По формулам (24, 26, 27, 32) рассчитываем круговые частоты вращения валов
 ;
;
 ;
;

 .
.
Полученное значение  с точностью до 0,1% совпадает с величиной этого параметра, рассчитанной в п. 2. Следовательно круговые частоты вращения валов определены верно.
с точностью до 0,1% совпадает с величиной этого параметра, рассчитанной в п. 2. Следовательно круговые частоты вращения валов определены верно.
11. Значения рассчитываем согласно (33)
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Полученное значение совпадает с требуемым в исходных данных. Следовательно вращающие моменты на валах привода определены верно.
Пример 5.4
Провести кинематический расчет привода (рис. 5) текстильной машины, если известно, что круговая частота вращения рабочего барабана  , а потребляемая им мощность
, а потребляемая им мощность  .
.

Рис. 5. Кинематическая схема привода
1. Заданная кинематическая схема привода относится к типу Г. В состав привода входят: асинхронный электродвигатель серии АИР, открытая передача с зубчатым ремнём, двухступенчатый коническо-цилиндрический редуктор, открытая цилиндрическая зубчатая передача иприводной вал с рабочим барабаном машины.
2. Уточнять характеристики исполнительного звена (выходного вала) привода нет необходимости, т.к. параметры  и
и  заданы:
заданы:  ,
,  .
.
3. Общий КПД привода рассчитываем в соответствии с (6) с учетом данных табл. 5
 .
.
4. Согласно (5) определяем требуемую мощность электродвигателя

5. По табл. 4 из условия (7) с учётом рекомендаций, приведённых в разделе 2 работы, выбираем электродвигатель типа АИР71А4 со следующими параметрами:  ;
;  ;
;  .
.
6. Рассчитываем общее передаточное отношение привода согласно (8)
 .
.
7. В соответствии с рекомендациями табл. 6 назначаем для открытых передач привода следующие передаточные отношения:  ,
, 
Тогда согласно (9) имеем
 ,
,
что соответствует рекомендуемым значениям для заданного двухступенчатого коническо-цилиндрического редуктора (табл. 8).
8. Используя рекомендации, приведённые в табл. 8 для данного редуктора, определяем передаточные отношения его тихоходной и быстроходной ступеней
 ;
;
 .
.
9. По формулам (14, 16, 17, 22) определяем мощности на валах привода
 ;
;
 ;
;

 ;
;
 .
.
Полученное значение совпадает с точностью до 0,8% со значением этого параметра, рассчитанном в п. 4. Следовательно мощности на валах привода определены верно.
10. По формулам (24, 26, 27, 32) рассчитываем круговые частоты вращения валов
 ;
;
 ;
;

 .
.
Полученное значение с точностью до 0,1% совпадает с требуемым в исходных данных. Следовательно круговые частоты вращения валов определены верно.
11. Значения  рассчитываем согласно (33)
рассчитываем согласно (33)
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Полученное значение  в данном случае проверке не подлежит, т.к.
в данном случае проверке не подлежит, т.к.
использованные при его расчёте значения  и практически совпадают с заданными в исходных данных значениями этих параметров.
и практически совпадают с заданными в исходных данных значениями этих параметров.
ЛИТЕРАТУРА
1. Иванов М.Н. Детали машин / М.Н. Иванов, В.А. Финогенов. – М.: Высшая школа, 2006.
2. Дунаев П.Ф. Конструирование узлов и деталей машин / П.Ф.Дунаев, О.П. Леликов. – М.: Издательский центр «Академия», 2006.
3. Атлас конструкций узлов и деталей машин / под ред. О.А. Ряховского. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2007.
СОДЕРЖАНИЕ
| Введение……………………………………………………………………........3 1. Уточнение технического задания на проект…………..………………………4 1.1. Уточнение типа машины, кинематической схемы привода и входящих в его состав узлов………………………….………4 1.2. Уточнение кинематических и силовых характеристик исполнительного звена привода……………………………….………….5 2. Выбор электродвигателя привода машины……………..…………………….6 3. Определение общего передаточного отношения привода и разбивка его по ступеням…………….……………………………….……...9 3.1. Определение общего передаточного отношения привода……….……...9 3.2. Определение передаточных отношений звеньев привода………….…...9 3.3. Разбивка передаточного отношения многоступенчатого редуктора по его ступеням……………………………………………….10 4. Определение мощностей, вращающих моментов и частот вращения валов привода………………………………………......….13 4.1. Определение мощностей на валах привода ………………………..……13 4.2. Определение круговых частот вращения валов привода……………....14 4.3. Определение вращающих моментов на валах привода ………….…….15 4. Примеры кинематических расчётов различных типов приводов машин..…………………………..…….…..……15 Литература ………………………………………………………...……..…….24 |
[1] Номинальная мощность электродвигателя - это мощность, которую он может длительно отдавать, не нагреваясь свыше допустимой температуры.