Жесткий несущий винт – это НВ, имеющий только осевой шарнир. Недостатками такого крепления лопасти являются:
1. Большой опрокидывающий момент.
При косом обтекании в азимуте 90о подъемная сила лопасти будет максимальной за счет складывания окружной скорости концевого элемента лопасти и скорости набегающего потока. Wэф будет максимальным. В азимуте 270о подъемная сила лопасти будет минимальной, так как Wэф = U+V. Поэтому равнодействующая этих сил или подъемная сила НВ будет приложена не к оси вращения, а на некотором расстоянии, возникает опрокидывающий момент.
2. Большие нагрузки в заделке лопасти (комлевой части)
Так как лопасть получает импульс на взмах вверх, большую нагрузку на растяжение и сжатие испытывает заделка лопасти. Эту силу разрыва еще усиливает центробежная сила лопасти. Возникают усталостные напряжения, которые приводят к поломке лопасти.
3. Большие вибрации концов лопастей и всего несущего винта.
При возникающих различных подъемных силах лопасти, в зависимости от азимутального положения, возникают большие вибрации лопастей и всего несущего винта, концы лопастей испытывают большие переменные деформации (колебания), поэтому они быстро разрушаются.
Как результат всех этих отрицательных явлений у вертолета появляется плохая устойчивость, управляемость и балансировка. Чтобы устранить все перечисленные недостатки в конструкции НВ применили горизонтальный шарнир (ГШ). ГШ полностью ликвидировал большой опрокидывающий момент. Лопасть получила возможность колебаться с различными углами взмаха, которые зависят от величины подъемной силы лопасти по азимутам. Полностью ликвидирован изгибающий момент в комле лопасти также за счет того, что лопасть получила возможность колебаться относительно оси ГШ. Как результат, улучшилась устойчивость, управляемость и балансировка. ГШ применяется на всех видах вертолетов, где речь идет о поднятии сколько-нибудь большого груза. Однако применение ГШ приводит к негативным явлениям, которые возникают от ряда моментов:
- момент от веса лопасти - возникает в центре масс лопасти и равен произведению веса лопасти G на расстояние от оси ГШ до центра тяжести а. Этот момент постоянный, так как вес лопасти и расстояние до центра масс не меняется.
Mg = G а = const

- момент от центробежной силы – возникает при вращении лопастей в точке центра масс. Этот момент также будет примерно одинаковым, т.к. расстояние до центра масс лопасти от оси вращения НВ не меняется, а постоянство центробежной силы задается строго определенными оборотами НВ.
Мцб = Fцб b = const

- момент от подъемной силы - будет постоянным лишь в том случае, когда мы имеем осевое обтекание (угол атаки НВ равен плюс-минус 90о). В осевом обтекании подъемная сила лопасти не меняется от азимутального положения, и лопасть занимает свой постоянный угол взмаха.
Мул = Ул с = const

При косом обтекании (А не равно плюс-минус 90о) подъемная сила лопасти будет различна по азимутам. Поэтому различным будет момент от подъемной силы. Меняется угол установки лопасти - лопасть получает маховые движения. Но в работе лопасть не машет на максимальные углы, она находится в условии равновесия, которое возникает в том случае, когда сумма всех этих моментов будет равна нулю (условие равновесия лопасти). При косом обтекании возникает зависимость эффективного потока (Wэф) от азимута лопасти. В азимуте 0-180о окружная скорость V складывается со скоростью набегающего потока и Wэф max будет равна в азимуте 90о Wэф = U+Vх sin 
В азимуте 180-0о от окружной скорости отнимается скорость набегающего потока и Wэф min будет в азимуте 270о. Поэтому подъемная сила лопасти также будет находиться в зависимости от азимутального угла. Из формулы подъемной силы лопасти
Ул = Су pWэф2 Sл
2
видно, что Ул находится в прямой зависимости от Wэф, а значит и от . Поэтому момент от ГШ относительно подъемной силы (Ул) лопасти также будет находиться в зависимости от азимута лопасти . Исходя из этого заключаем, что максимальный взмах лопасть получает в азимуте 90о, а минимальный взмах - в азимуте 270о.
Но на взмах лопасти еще влияют инерционные силы. В азимуте 90о лопасть получает максимальный импульс взмаха вверх от набегающего потока, возникает дополнительная подъемная сила. Под действием инерционных сил лопасть продолжает иметь скорость взмаха вверх. Поэтому в реальных условиях максимальный угол взмаха будет в азимуте в районе 210о. В азимуте 270о лопасть имеет минимальную подъемную силу от обтекания лопасти сзади набегающим потоком. Инерционные силы остаются постоянными. Лопасть машет вниз, и максимальный взмах вниз получается в районе азимута 30о.

В результате применения ГШ в поступательном полете конус НВ завален назад и влево.
Вместе с положительными моментами от применения ГШ получили большие маховые движения лопасти, которые ведут к повышенным вибрациям всего вертолета. От завала конуса назад и влево полная аэродинамическая сила НВ Rнв дает две составляющие: Xn и Zn.
Они уменьшают запас управления, а также Zn направлена в ту же сторону, что и тяга рулевого винта Ррв. Складываясь, они дают большую тягу влево. Эту тягу надо парировать большим отклонением ручки циклического шага вправо. Поэтому начали работать над уменьшением завала конуса. Уменьшив завал конуса, увеличили запас управления. Это устранили применением компенсатора взмаха.
Компенсатор взмаха не дает лопасти сильно раскачиваться при маховых движениях. Если компенсатор (поводок) закрепить на оси ГШ, то компенсации не будет, т.к. лопасть будет совершать маховые движения относительно одной оси: ГШ - компенсатор.

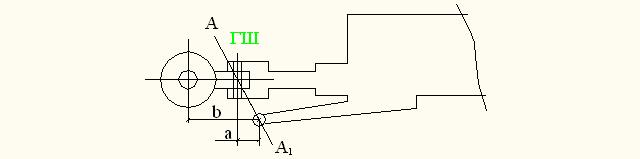
Но если поводок закрепить на некотором расстоянии от оси ГШ, то возникает компенсация взмаха. Поводок компенсатора взмаха установлен на расстоянии а от оси ГШ. Поэтому маховые движения лопасть совершает перпендикулярно линии АА1 .
При увеличении подъемной силы лопасть получает взмах вверх. Но лопасть передней кромкой соединена с поводком, который устанавливается неподвижно. Поэтому при взмахе вверх поводок как бы сдерживает переднюю кромку лопасти, уменьшается установочный угол, уменьшается подъемная сила, уменьшается взмах. И наоборот. При взмахе лопасти вниз поводок увеличивает установочный угол, тем самым уменьшая взмах вниз. Происходит компенсация маховых движений лопасти.
Уменьшить маховые движения лопасти также можно, применив второй способ компенсации – изменив угол поворота оси ГШ.

Самым простым способом является увеличение подковой компенсации, т.е. увеличение коэффициента компенсации: К = a = 0,5
b
Но увеличение К приводит к усилению особого рода вибраций лопастей НВ – вибрации типа флаттер (стр. 74). Поэтому потерю устойчивости маховых движений лопасти устраняют, применив оба способа компенсации – поводковой компенсации с К = 0,5 и изменение угла поворота оси ГШ ~ на 5,5о конструкцией втулки НВ.
В результате применения компенсации маховые движения лопасти уменьшились, т.к. при взмахе вверх установочный угол лопасти уменьшается и при взмахе вниз увеличивается. Уменьшилась скорость взмаха – уменьшились инерционные силы. Поэтому максимальный взмах лопасти наступает раньше по азимуту = 160о, а минимальный = 340о.

От этого завал конуса в поступательном полете получил завал назад и вправо. От завала конуса вправо полная аэродинамическая сила НВ Rнв дает составляющую Zn, направленную вправо, т.е. в противоположенную сторону от тяги РВ, что компенсирует тягу РВ.