Из схемы сил для разгона видно, что для увеличения скорости на постоянной высоте необходимо увеличить Rнв, тем самым увеличить подводимую мощность Nподв. Разгон скорости на постоянной высоте лучше выполнять на 1 режиме. Увеличение скорости происходит до тех пор, пока вертолет не израсходует дельта N для разгона и на V2 сбалансируется в установившемся ГП.

На 2 режиме разгон более сложный. В начале разгона так же необходимо отклонить Rнв вперед, увеличив при этом ОШ для предотвращения потери высоты. Но с началом роста скорости из-за увеличения эффекта косого обтекания потребная мощность уменьшается, и для балансировки на скорости V2 подводимую мощность необходимо уменьшить до меньшего значения, нежели она была до начала разгона.

Для торможения на постоянной высоте необходимо уменьшить Хан. Для этого необходимо уменьшить подводимую мощность, удерживая вертолет на постоянной высоте. С уменьшением скорости уменьшается сопротивление фюзеляжа Хф, и когда силы Хан = Хф, вертолет сбалансируется в установившемся ГП.

Так же как и при разгоне, торможение на 1 режиме более простое и не требует дополнительных движений органами управления. На 2 режиме для торможения необходимо убрать подводимую мощность, но погасив скорость необходимо снова увеличить Nподв, чтобы лететь в ГП.

Из графика видно, что после торможения необходимо подводить мощность большую, чем до торможения, т.к. с уменьшением скорости из-за эффекта косого обтекания НВ, Rнв снижается.
Вираж
Правильным виражом называется полет по окружности на 360о с постоянной скоростью без изменения высоты с постоянным креном без скольжения. Часть виража называется разворотом.
Для выполнения виража РУ отклоняется в сторону выполнения виража, Rнв наклоняется, Zан увеличивается и создает центростремительную силу Fцс. А затем в процессе выполнения виража возникает центробежная сила Fцб, которая компенсирует Fцс. Условие правильного виража Fцб = Fцс
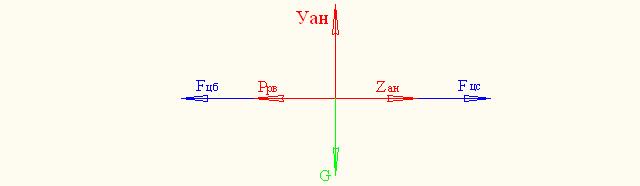
Схема сил на правильном вираже
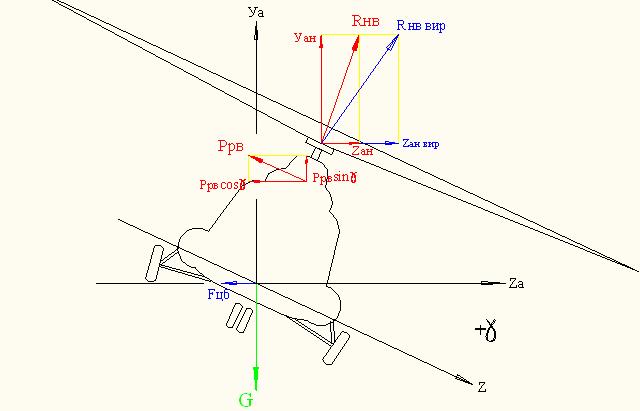
Как видно из схемы сил на правильном вираже G уравновешивается силой Уан и составляющей Ррв sin угла крена. Для получения виража необходимо создать силу Zан вир и для сохранения высоты полета сохранить Уан постоянной. Это достигается увеличением Rнв. Тем самым, чем больше необходимо сделать угол крена, тем большая мощность необходима для этого. На определенном режиме ГП существует определенный избыток мощности, который может быть реализован для выполнения правильного виража с определенным углом крена. Так как максимальный запас мощности осуществляется на Vэк, то максимальный угол крена можно получить также на Vэк. Этот угол называется предельным углом крена. В эксплуатации из условий обеспечения достаточного запаса мощности, запаса управления для маневрирования и ограничения прочности лопастей, виражи с предельным углом крена не выполняются, и РЛЭ устанавливает максимально-допустимые углы крена в зависимости от высоты, полетного веса и вида полета.
Правый вираж
При вводе в правый вираж наблюдаются:
- увеличение угла тангажа;
- уменьшение скорости;
- уменьшение высоты.
Увеличение угла тангажа объясняется:
1) при вводе в вираж происходит наклон Rнв, что сопровождается уменьшением Уан и Хан, а уменьшение Хан уменьшает пикирующий момент;
2) при перемещении правой педали “вперед” углы установки лопастей РВ увеличиваются, тем самым увеличивая реактивный момент РВ;
3) гироскопический момент НВ при вводе в правый вираж кабрирующий.
Уменьшение скорости обуславливается увеличением угла тангажа, т.к. уменьшается Хан.
Уменьшение высоты:
1) при наклоне Rнв уменьшается Уан;
2) при перемещении правой педали происходит дополнительный отбор мощности на РВ, что ведет к уменьшению Rнв.
Левый вираж
При вводе в левый вираж наблюдаются:
- уменьшение угла тангажа;
- увеличение скорости;
- уменьшение угла крена;
- уменьшение высоты.
Уменьшение угла тангажа:
1) при перемещении левой педали “вперед” углы установки лопастей РВ уменьшаются, что ведет к уменьшению кабрирующего момента РВ;
2) гироскопический момент НВ при вводе в левый вираж пикирующий.
Увеличение скорости обуславливается уменьшением угла тангажа, что вызывает рост Хан и падение Уан. Вертолет увеличивает скорость и снижается.
Уменьшение угла крена объясняется увеличением зоны обратного обтекания и уменьшением средней W отступающей лопасти, в результате чего вертолет стремится выйти из крена.
Для выполнения любого виража необходимо плавно отклонить РУ и педаль в сторону выполняемого виража, одновременно увеличивая мощность рычагом Ш-Г для сохранения высоты. При правом вираже перемещение правой педали вызывает необходимость увеличивать общий шаг больше, нежели при левом вираже. По достижении заданного угла крена накренение прекращается движением РУ в обратную сторону, и вертолет продолжает совершать вираж. Удерживая РУ в таком положении, вертолет балансируется с заданным углом крена и скоростью.
В момент ввода вертолета в правый вираж гироскопический момент НВ создает вертолету большой кабрирующий момент, стремящийся вывести его из крена. Гироскопический момент РВ так же стремится вывести вертолет из крена. Действие гироскопических моментов продолжается на всем протяжении ввода в вираж. Поэтому РУ необходимо противодействовать этому моменту. Лучше перед вводом в вираж “прижать” вертолет РУ “от себя”. Как только крен установится постоянным, этот момент исчезает, и вертолет опускает нос, балансируясь с опущенным носом ввиду дополнительного пикирующего момента от вертикальной составляющей тяги РВ. При угле крена 30о sin 30 дает половину Ррв.

В процессе выполнения правого виража на вертолет продолжают действовать постоянные гироскопические моменты НВ и РВ, ввиду их сложного движения по окружности виража с одновременным наклоном их оси и вращения вертолета вокруг вертикальной оси. Они стремятся вывести вертолет из крена и создать кабрирование с потерей скорости. Поэтому, чтобы сохранить заданные крен и скорость на правом вираже, необходимо давить на РУ “от себя” по диагонали и “вправо”.
В момент ввода вертолета в левый вираж гироскопический момент НВ создает пикирующий момент, продолжающийся на всем протяжении ввода в вираж, поэтому требуется удерживать вертолет РУ “на себя”. Как только крен установится, вертолет балансируется с приподнятым носом, ввиду кабрирующего момента вертикальной составляющей тяги РВ. В процессе левого виража на вертолет продолжает действовать постоянный пикирующий момент НВ с увеличением крена, а гироскопический момент РВ действует на вывод из крена. Чтобы сохранить заданный крен и скорость на левом вираже, необходимо РУ удерживать “на себя” и “вправо”.
Необходимо отметить, что при виражах с малыми углами крена указанная разница в технике выполнения правого и левого виражей мало заметна. При глубоких виражах и резких вводах в вираж эта разница ощутима и требует упреждающих движений РУ и соответствующего внимания в процессе самого виража.
Вывод из виража (разворота) рекомендуется начинать, не довернувшись до намеченного курса или ориентира примерно на величину, равную половине угла крена координированным отклонением РУ, рычага ОШ и педалей с учетом перечисленных выше особенностей.
Режимы полета. Снижение
Снижение вертолета по наклонной траектории может выполняться как при работающих двигателях (моторное снижение), так и на режиме самовращения НВ (авторотации). Моторное снижение является основным видом уменьшения высоты.
Схема сил на моторном снижении
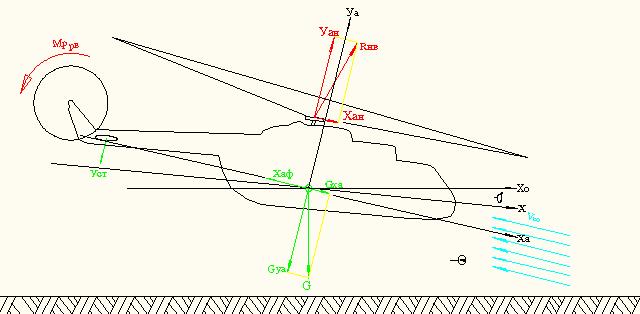
Снижение по крутой траектории
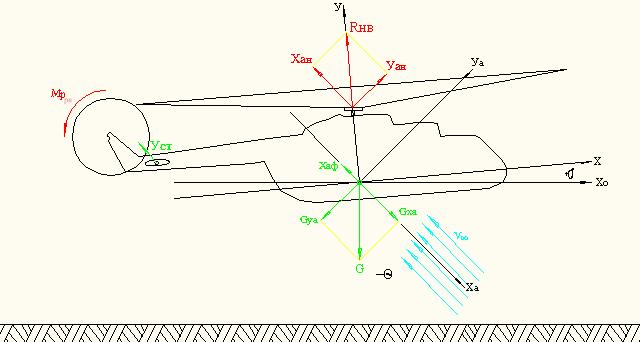
При таком снижении можно получить любую малую вертикальную скорость (Vу) и любой малый угол наклона траектории. Этим моторное снижение отличается от снижения на РСНВ. При снижении Nрасп меньше, чем Nп для горизонтального полета на той же скорости на величину работы, совершаемой силой веса вертолета в секунду,
Nп – Nрасп = G Vу / 75
Для снижения необходимо убрать мощность, создавая ее недостаток, который дает Vу снижения. В начальный момент из-за уменьшения углов установки лопастей подъемная сила НВ уменьшается, появляется отрицательное вертикальное ускорение, и вертолет начинает снижаться. Затем из-за увеличения углов атаки на снижении подъемная сила восстанавливается, и вертолет переходит в установившийся режим снижения. В дальнейшем для соблюдения условий установившегося полета необходимо выдерживать Vу снижения постоянной.
Вертикальной скоростью снижения можно управлять недостатком мощности, т.е. изменять величину Nрасп, при этом на одной и той же скорости по траектории можно снижаться с различной Vу. Однако Vу сниж. max ограничена опасностью срыва потока с отступающей лопасти из-за большого угла атаки. Так же Vy max ограничивается из-за возможности попадания в режим “вихревого кольца”.
Минимальная вертикальная скорость снижения задается пилотом и зависит от величины дефицита мощности, который имеет минимальное значение на Vэк.

Для снижения из режима горизонтального полета также можно перейти, отклоняя РУ “от себя”, не меняя режим работы двигателей. Отклоняясь вперед, Rнв уменьшает Уан, увеличивая при этом Хан. Происходит разбалансировка по высоте с увеличением скорости.
Режимы полета. Посадка
На вертолете возможны следующие виды посадки:
- посадка по-вертолетному с использованием влияния воздушной подушки (с ИВВП);
- посадка по-вертолетному без использования влияния воздушной подушки (без ИВВП);
- посадка с пробегом (по-самолетному).
Посадка по-вертолетному, с использованием влияния воздушной подушки, применяется на аэродромах и посадочных площадках, где воздушные подходы позволяют снижение на предпосадочной прямой до высоты 2-3 м. На этой высоте происходит увеличение подъемной силы НВ за счет влияния эффекта земной поверхности. На посадочной прямой необходимо визуально отметить, как проектируется площадка для посадки на остеклении фонаря пилотской кабины. При снижении и гашении скорости выдерживание проекции площадки на одном месте фонаря означает снижение по установившейся траектории снижения. Если площадка “уходит” вниз, то расчет на посадку выполняется с перелетом. Если площадка “уходит” вверх – то с недолетом. Сложность в пилотировании заключается в переходе с режима косого обтекания на режим осевого обтекания в момент зависания. Уменьшение подъемной силы необходимо компенсировать увеличением ОШ. Происходит увеличение Мр НВ, увеличивается потребный ход правой педали. При этом необходимо сохранять направление и не допускать разворота влево. Разворот влево увеличивает угол атаки РВ, с возможной потерей тяги РВ из-за срыва потока на лопастях РВ и попадания его в режим “вихревого кольца”. Увеличенную тягу РВ необходимо компенсировать силой Zан, отклоняя РУ “вправо”. Снижение и гашение скорости происходит с положительным углом тангажа (РУ отклонена “назад”). При зависании незначительным движением РУ “вперед” необходимо уменьшить тангаж вертолета для предотвращения смещения назад. После зависания необходимо триммером снять нагрузки с органов управления, сбалансировать вертолет и, незначительно уменьшая ОШ, перейти к вертикальному снижению. Возникающую разбалансировку своевременно устранять органами управления. По мере приближения к земле эффект воздушной подушки увеличивается, вертикальная скорость уменьшается. Вертолет приземляется сначала на правое (правый крен на висении), затем на левое и на переднее колесо. Возможные перемещения упреждаются органами управления. Необходимо отметить, что основная разбалансировка происходит при перемещении рычага Ш-Г. Поэтому чем меньше на снижении у земли перемещается рычаг Ш-Г вверх-вниз, тем меньшая разбалансировка вертолета, и касание происходит мягко и не заметно.
Посадка без ИВВП производится на площадки с закрытыми подходами. Препятствия необходимо проходить с превышением не менее 10 м и зависание производить на высоте, где эффект воздушной подушки отсутствует или его влияние минимально. На этой высоте необходима мощность большая, чем при висении в зоне ВВП. Отсюда больший ОШ, меньший запас мощности (возможно падение оборотов НВ). Увеличенный Мр НВ необходимо компенсировать дополнительным движением правой педали “вперед”. При этом уменьшается запас путевого управления и даже незначительный ветер справа может создать условия, когда правая педаль окажется на упоре, и вертолет может перейти в неуправляемое левое вращение. Чтобы избежать этого при появлении стремления вертолета к левому развороту необходимо незамедлительно парировать это стремление перемещением правой педали. Если правая педаль близка к упору, необходимо незамедлительно уменьшить ОШ. Уменьшение Мр НВ с одновременным отклонением правой педали до упора приведет к развороту вертолета вправо и уменьшению неблагоприятного влияния “правого ветра”. Затем, увеличив ОШ восстановить высоту висения. Вертикальное снижение производить аналогично снижению в зоне ВВП, не допуская большой вертикальной скорости из-за возможного попадания в режим “вихревого кольца”.
Посадка с пробегом (по-самолетному) выполняется на посадочные площадки и аэродромы с заранее известным прочным грунтом. Такой вид посадки применяется при недостатке мощности для зависания (например, в высокогорье, при высоких температурах, большой посадочной массе) и в учебных целях. Воздушные подходы должны быть открыты, а размеры площадки достаточны для послепосадочного пробега. Снижение производится аналогично заходу на посадку с ИВВП. Уменьшение вертикальной и поступательной скорости производить с таким расчетом, чтобы вертолет до касания не переходил на режим осевого обтекания. За счет косого обтекания сохраняется достаточная подъемная сила НВ и отсутствует режим тряски. При боковом ветре со сносом бороться изменением курса на ветер. На высоте выравнивания (3-5 м) педалями установить посадочный курс, а креном в сторону ветра устранить смещение. Триммером снять нагрузки с органов управления, установить вертикальную скорость снижения 0.1-0.2 м/с и приземлить вертолет. Как и при вертикальной посадке, непосредственно у земли стараться как можно меньше перемещать вверх-вниз рычаг Ш-Г. Приземление производить на основные колеса (правое, затем левое) с последующим опусканием носового колеса. Для предотвращения колебаний носового колеса (эффект Шимми) не допускать боковых смещений в момент касания. На послепосадочном пробеге уменьшить ОШ до минимума и использовать тормоза колес. Не допускается при минимальном шаге отклонение РУ на себя более ¼ хода ручки во избежание удара лопастями по хвостовой балке. Для сокращения дистанции пробега применяется способ торможения несущим винтом. Для этого после приземления ОШ сбрасывается не до минимального значения, а до 4-5о и РУ отклонить “на себя” на 1/3 – 1/2 хода от нейтрального положения и применить тормоз колес. После остановки вертолета перед уменьшением общего шага РУ нужно возвратить в нейтральное положение.
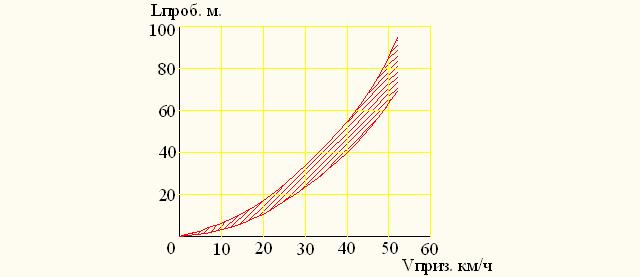
Зависимость длины пробега от скорости приземления
Как частный случай разберем заход на посадку по-вертолетному (с ИВВП или без ИВВП) по пологой глиссаде, характерные ошибки и способы их устранения.
При заходе на посадку по пологой глиссаде вертолет перед зависанием движется с поступательной скоростью, практически не снижаясь. Интенсивность торможения характеризуется отрицательным ускорением (замедлением). Поэтому для уменьшения поступательной скорости необходимо создать силу, противодействующую инерционной силе, направленной вперед и действующую как движитель. Этой силой является проекция полной аэродинамической силы на ось ОХа – Хан. При торможении РУ “на себя” конус вращения НВ отклоняется назад, и чем больше будет сила Хан, направленная назад, тем интенсивнее происходит торможение. Но сильно отклонять РУ “на себя” нежелательно. При энергичном увеличении угла тангажа НВ быстро переходит на положительные углы атаки. При этом увеличиваются обороты НВ, и система автоматического поддержания оборотов НВ уменьшает мощность двигателей. В следующий момент, когда скорость упадет РУ необходимо отклонить “вперед” для выравнивания вертолета и придания посадочного положения. При этом начинают падать обороты, происходит “просадка”, которую необходимо поддержать увеличением ОШ. Из-за малой приемистости двигателей происходит дополнительное падение оборотов и “перетяжеление НВ”. Такое выравнивание с гашением скорости увеличением тангажа более 10о нужно считать ошибкой. Кроме того, при увеличении тангажа ухудшается обзор, посадочная площадка, а порой и линия горизонта “уходят” за приборную доску. Возникающий снежный или пыльный вихрь только ухудшает обзорность. Чтобы не увеличивать в дальнейшем тангаж, увеличение силы Хан возможно только увеличением Rан. Из-за практически отсутствия вертикальной скорости происходит набор высоты при незначительном гашении скорости, так как Уан несоизмеримо больше Хан. Происходит перелет площадки или зависание на большой высоте.
Чтобы избежать этого при подходе к площадке по пологой глиссаде, проанализировав темп гашения скорости и высоту, необходимо уменьшить ОШ для создания отрицательного вертикального ускорения. Затем увеличить ОШ для парирования отрицательного вертикального ускорения. Для этого ОШ берется на большую величину, нежели он был до этого. Возрастание Rнв приводит к увеличению Уан (для гашения возникшей вертикальной скорости) и к увеличению Хан, так как торможение до этого производилось с положительным углом тангажа. Описанное выше увеличение оборотов НВ при сбросе шага и последующее “затяжеление” необходимо контролировать, не допуская падения оборотов НВ ниже 89%. Но к моменту зависания двигатели успевают выйти на повышенный режим, и зависание проходит без потери высоты из-за возможного недостатка мощности. Такой маневр получил название “торможение общим шагом”. Неизбежно возникающую при таких действиях разбалансировку необходимо своевременно устранять соответствующими перемещениями органов управления.
