Введение
Актуальность: По данным Минздрава России слепых и слабовидящих насчитывалось 218 тыс. человек, из них абсолютно слепых – 103 тыс. (данные на 2009 год) [4]. Незрячие люди могут быть вполне самостоятельными, но применение различных приспособлений увеличивает их возможности.
Цель: сделать устройство, которое поможет слабовидящим ориентироваться в незнакомых помещениях и которое применяется совместно с тростью. А кроме того, устройство должно быть не сложным в сборке, чтобы любой радиолюбитель мог помочь в его создании.
Задачи:
1. Из различных источников изучить принципы эхо локации и ее применение,
2. Проанализировать технические устройства для помощи слепым и слабовидящим;
3. Изучить зависимость скорости звука от температуры воздуха, оценить точность измерения используемого датчика при низких температурах;
4. Используя знания в области робототехники, собрать экспериментальный образец установки;
5. С помощью ПО конструктора составить рабочий алгоритм программы;
6. Исходя из выводов по проделанной работе определить перспективы дальнейшего развития проекта.
Критерии результативности: получение устройства, которое будет удовлетворять заявленным требованиям.
Необходимые ресурсы:
· Контроллер Arduino
· Наушники или бузер
· Ультразвуковой сенсор
· Маленький выключатель
· Разъем для батарейки крона, разъем питания
· Батарейка крона
· Провода
Стоимость комплектующих составила около 1000 рублей
Практическая значимость
Прототип устройства может быть использован для дальнейшей разработки реального прибора. Возможна доработка его функционала, а также замена звукового сигнала на вибрацию
Структура работ
Мир без красок
Картина мира слепого во многом зависит от того, во сколько лет он потерял зрение. Если это произошло уже в сознательном возрасте, то человек мыслит теми же образами, что и зрячие люди. Просто информацию о них он получает с помощью других органов чувств. Если человек потерял зрение в детстве, после пяти лет, он может помнить цвета и понимать их значение. Совсем по-иному представляют себе мир люди, которые никогда не были зрячими. Будучи слепыми от рождения или с младенческого возраста, они не знают ни образов мира, ни его красок. Для них зрение, как и визуальное восприятие ничего не значит, поскольку область мозга, отвечающая за преобразование визуальной информации в изображение, у них просто не работает. Зрячие люди получают 90 % информации благодаря своим глазам. Зрение для человека – главный способ восприятия мира. Для слепого же эти 90% или, по некоторым версиям 80%, приходятся на слух. Слепые могут по-настоящему слышать и внимательно следить за звуками, но и в некоторых случаях использовать эхолокацию. Правда, для этого нужно научиться распознавать звуковые волны, отраженные окружающими объектами, определять положение, удалённость и размер предметов, находящихся поблизости.
Принцип эхолокации
Открытие эхолокации связано с именем итальянского естествоиспытателя Ладзаро Спалланцани. Он обратил внимание на то, что летучие мыши свободно летают в абсолютно тёмной комнате (где оказываются беспомощными даже совы), не задевая предметов. В своём опыте он ослепил несколько животных, однако и после этого они летали наравне со зрячими. Коллега Спалланцани Ж. Жюрин провёл другой опыт, в котором залепил воском уши летучих мышей, — и зверьки натыкались на все предметы. Отсюда учёные сделали вывод, что летучие мыши ориентируются по слуху.[1]
 Эхолокация может быть основана на отражении сигналов различной частоты — радиоволн, ультразвука и звука. Первые эхолокационные системы направляли сигнал в определённую точку пространства и по задержке ответа определяли её удалённость при известной скорости перемещения данного сигнала в данной среде и способности препятствия, до которого измеряется расстояние, отражать данный вид сигнала. Обследование участка дна таким образом при помощи звука занимало значительное время.
Эхолокация может быть основана на отражении сигналов различной частоты — радиоволн, ультразвука и звука. Первые эхолокационные системы направляли сигнал в определённую точку пространства и по задержке ответа определяли её удалённость при известной скорости перемещения данного сигнала в данной среде и способности препятствия, до которого измеряется расстояние, отражать данный вид сигнала. Обследование участка дна таким образом при помощи звука занимало значительное время.
Сейчас используются различные технические решения с одновременным использованием сигналов различной частоты, которые позволяют существенно ускорить процесс эхолокации.
В основе работы нашего прибора лежит эхолокация. Ультразвуковой датчик испускает ультразвуковой сигнал и принимает отраженный. По времени между излученным сигналом и поглащенным сигналом вычисляется расстояние до препятствия.
В нашем приборе контроллер получает данные с ультразвукового датчика и в зависимости от расстояния издает звук различной частоты.
Обзор устройств, подобного типа промышленного производства
В продаже встречаются устройства для ориентации в пространстве, но их крайне мало и у них довольно высокая цена, например, электронная трость RAY.
Электронная трость RAY[3]

| Артикул: 7168 Ray – это маленькая система ориентирования, основанная на ультразвуковой технологии. Этот чувствительный прибор является дополнением к белой трости и помогает пользователю при помощи ультразвуковых датчиков заранее заметить предметы и препятствия. | 16 600 руб.
Купить

|
Также мы нашли любительские разработки, которые так и не дошли до производства, например, бейсболка-сонар.

Анализ рынка показал, что устройств подобного типа немного и они востребованы.[2]
Нашей задачей было создать устройство достаточно доступное по цене, несложное в изготовлении, помогающее незрячему человеку получать информацию о препятствии. Эту задачу мы реализовали с помощью набора Arduino и 3d принтера.
Этапы работы над проектом:
1. Изучение возможностей Arduino
2. Создание электронной схемы (Приложение 1, рис1)
3. Создание программы для устройства (Приложение1, рис 2)
4. Тестирование работы устройства (Приложение1, рис 3)
5. Создание модели корпуса в 3 d редакторе (Приложение 1, рис 4)
6. Печать корпуса на 3 d принтере. (Приложение 1, рис 5)
7. Сборка устройства и проверка его работоспособности (Приложение1, рис 6)
Выводы
В ходе работы над проектом был создан прототип устройства, которое выполняет функции ультразвукового сонара, опробованы его возможности. Выявлены следующие недостатки конструкции:
1. Звуковой сигнал может напугать других людей, находящихся поблизости, поэтому в дальнейшем необходимо сигнал подавать на наушник или заменить вибросигналом
2. Если в помещении будет работать несколько таких устройств, то их работа будет некорректной.
3. Угол обзора нашего устройства получился небольшой, порядка.
Источники информации:
1. https://ru.wikipedia.org/wiki/%D0%AD%D1%85%D0%BE%D0%BB%D0%BE%D0%BA%D0%B0%D1%86%D0%B8%D1%8F
2. https://habrahabr.ru/post/173585/
3. https://rosopeka.ru/good3430.html
4. https://ria.ru/spravka/20161013/1478940323.html
Приложение1

Рис.1 Создание электронной схемы

Рис.2 Создание программы

Рис.3 Тестирование схемы

Рис.4 Создания модели корпуса
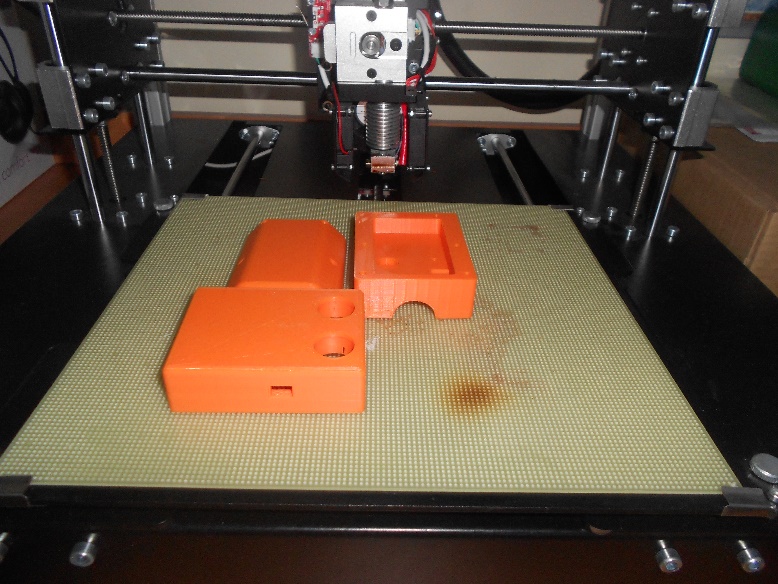
Рис.5 Печать корпуса на 3 d принтере
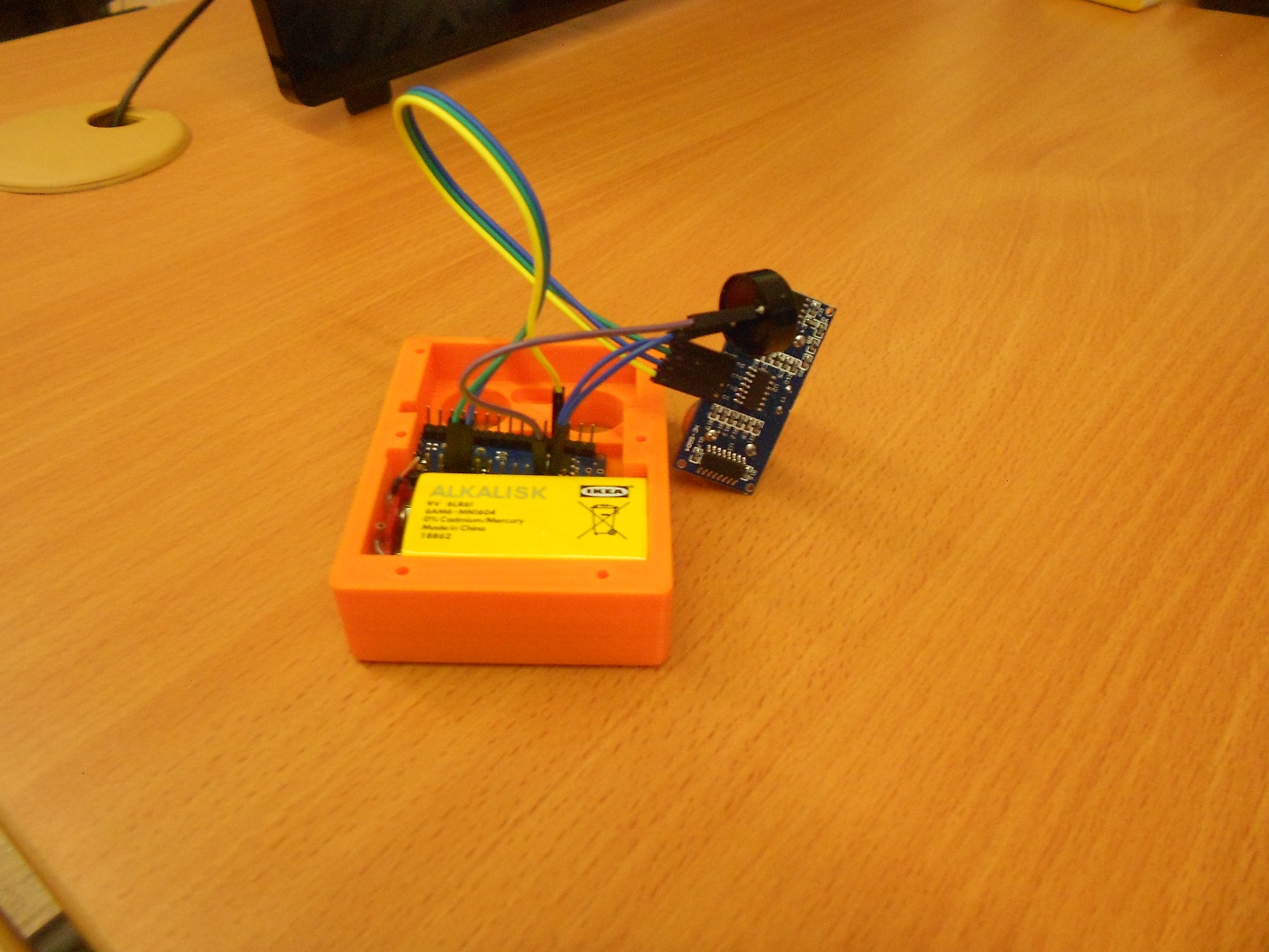
Рис.6 Сборка устройства