БИОЛОКАЦИОННЫМ МЕТОДОМ
Главным поисковым признаком при биолокационных поисках любых интересующих объектов, в общем случае, является резкое увеличение величины сигнала на каком-либо исследуемом участке, изменение знака сигнала (вращение рамки в обратную сторону). Обусловлено это залеганием на нем различных неоднородностей, отличающихся по физическим параметрам от остальной среды. Такими параметрами могут быть повышенная или, наоборот, пониженная плотность скоплений, их высокая проводимость электрического тока, высокое удельное электрическое сопротивление или резкое увеличение составляющих земного магнетизма. Объекты с вышеназванными параметрами при биолокационных поисках выделяются как аномальные на фоне основной среды. Среда, не включающая в себя аномальные объекты, условно будет считаться нормальным полем, и на этом поле, в процессе биолокационных исследований, рамка-индикатор вращается равномерно по ходу движения оператора или навстречу ему с одинаковой скоростью, чаще всего медленно и вяло.
Над аномальным объектом, имеющим более высокую электрическую проводимость, происходит увеличение электрической индукции, что приводит к более интенсивному вращению рамки над этим объектом. Если же аномальный объект не проводит электрический ток, индукции не возникает или её величина очень маленькая, и рамка при этом либо не вращается совсем, либо её вращение незначительное. Рамка перестает вращаться над аномальными объектами, имеющими более высокую плотность по отношению к остальным породам. Она останавливается над объектом в положении вверх скобой. Если аномальный объект имеет более низкую плотность или представляет пустоту, то рамка перестает вращаться над ним и останавливается скобой вниз. В том и в другом случае после прохождения аномального объекта рамка продолжает вращаться в направлении первоначального вращения. Момент возобновления вращения рамки указывает на границу залегания аномального объекта. Если рамка над аномальным объектом вращается в противоположную сторону, это указывает на его электропроводность, например медная руда. Вращение в обратную сторону указывает на смену знака поляризации аномальной среды. Необходимо всегда помнить, в какую сторону начинает вращаться рамка первоначально.
Необходимо уметь по поведению рамки различать ложные аномалии. Кроме того, по одной и той же линии исследования рамка в одну сторону может вращаться, а в другую стоять на месте. В таком случае необходимо произвести измерения перпендикулярно направлению первоначального поиска в ту и другую сторону, по одной и той же линии исследования. Рамка либо не покажет наличия аномального объекта, либо укажет его границы. На рисунке 9 показано поведение рамки при прохождении над рудным объектом и над объектом, представляющим пустоту. Как видим, над рудным объектом рамка останавливается скобой вверх, и возобновляет вращение сразу же после прохождения его (Рис.9-а). Над объектом, представляющим пустоту, рамка останавливается скобой вниз и возобновляет вращение сразу же после прохождения пустоты (Рис.9-в).
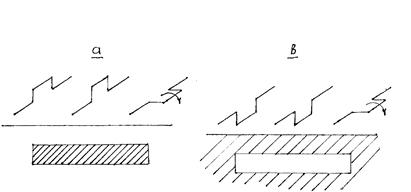
Рис. 9
а - Поведение рамки при прохождении оператором над рудным объектом.
в - Поведение рамки при прохождении оператором над объектом, представляющим пустоту.
Умение правильно разделять поля над аномальными объектами и нормальные поля, отличать их от ложных аномалий, является задачей более сложной, и её решение достигается длительным опытом и анализом полученных результатов, а реагирование рамки на слабые аномальные объекты зависит исключительно от чувствительности оператора к внешним сигналам. Необходимо различать аномальные объекты рудного и нерудного происхождения. На рисунке 10 представлены результаты модельных работ, проведенных над электропроводящим объектом. Модель имеет прямоугольную форму, изготовленную из электропроводящего материала (различные металлические опилки, скрепленные цементом). Модель закопана в землю на глубину 0,7 метра (Рис.10-а). На рисунке 10-в для сравнения представлены результаты теоретической кривой при профилировании дипольной установкой в геофизическом методе электроразведки над хорошо проводящим пластом.
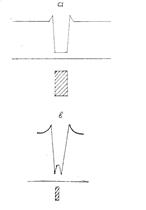
| Рис. 10. Сравнение результатов модельных и теоретических работ над электропроводящим объектом |
Если оператор проходит над рудным объектом (Рис.11), находящимся в естественном залегании, рамка на границе рудного тела меняет направление вращения на противоположное, что можно воспринимать как смену знака на противоположный. В таком случае практическая кривая биолокации полностью совпадает с теоретической, представленной на рисунке 10.

Рис. 11. Поведение рамки при прохождении над рудным объектом
При ведении поиска электрического кабеля, проложенного под землей, рамка не будет вращаться, если оператор идет вдоль линии проложенного кабеля. Если оператор пересекает направление пролегания кабеля под прямым углом, рамка совершает всплеск при прохождении над кабелем. Одной точки поиска недостаточно. Чтобы определить местонахождение электрического кабеля под землей, необходимо провести не менее трех таких измерений, приблизительно на расстояниях, равно удаленных друг от друга. При поиске места повреждения кабеля необходимо отметить найденный кабель не менее чем по трем профилям, расположенным друг от друга на расстоянии приблизительно 3 - 5 метров. Направление профилей должно быть перпендикулярным пролеганию искомого кабеля. Все три поисковые точки должны расположиться в одну линию. После этого приступают к поиску места повреждения. Для этого на кабель подается постоянное напряжение величиной в 12 или 24 Вольта. Над местом повреждения кабеля рамка в руках оператора делает оборот в обратную сторону. Этот момент определяет точку нахождения повреждения. На рисунке 12-а представлены результаты модельных работ по биолокации над горизонтальным металлическим стержнем, закопанным в землю на глубину 0,5 метра. Перпендикулярно этому стержню на поверхности проходит размеченная линия исследования. Над стержнем рамка резко меняет направление вращения.
На этом же рисунке 12-в дана для сравнения теоретическая кривая Zа от магнитной аномалии над горизонтальным круговым цилиндром.
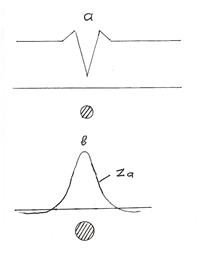
| Рис.12 Сравнение модельной кривой по биолокации над горизонтальным цилиндрическим стержнем (а) с теоретической кривой магнитной аномалии Zа над горизонтальным круговым цилиндром (в). |
Поиск водопроводных труб и других коммуникаций, проложенных под землей, аналогичен поиску электрического кабеля.
Другим поисковым признаком обнаружения аномальных объектов в биолокации является вращение рамки с возрастанием или убыванием скорости её вращения на единицу длины пройденного расстояния, а также прекращение вращения или изменение направления вращения в противоположную сторону по отношению к первоначальному. При поисках рудных объектов момент вращения рамки в обратную сторону может отмечать границу разлома, дайки или смену состава породы.
Положение в пространстве рудного тела, расположенного на пути исследуемой линии, также влияет на поведение рамки. Если рудное тело расположено горизонтально, то рамка над ним может менять направление вращения на противоположное или может прекратить вращение. Если рудное тело расположено под некоторым углом, то рамка может вести себя двояко. При движении навстречу поднятому блоку рудного тела рамка делает рывок в обратную сторону на границе рудного тела, ведёт себя неподвижно над самим рудным телом и резко «клюёт» вниз над границей опущенного блока. Вот сколько положений может иметь рамка на одном и том же исследуемом участке.
Модельные работы и сравнение их результатов с теоретическими данными проводились с целью выяснения природы вращения рамки. Они еще раз подтвердили связь феномена вращения рамки с электромагнитными полями Земного и техногенного происхождения через электрическую индукцию.
При поисках подземных вод рамка на одном из направлений движения оператора может покачиваться вверх-вниз. Этот признак указывает, что движение оператора соответствует направлению движения потока воды. При движении в сторону, противоположную потоку, рамка стоит на месте. Для того чтобы научиться обнаруживать подземные водоносные слои, полезно проводить тренировку на берегу реки. Если оператор идет вдоль берега и направление его движения совпадает с направлением течения, то рамка будет покачиваться вверх-вниз. Рамка будет неподвижной, если он движется навстречу течению. То же происходит с рамкой, если оператор движется по льду над рекой. При движении оператора поперёк реки вращающаяся рамка, отметив границы берегов, над потоком будет вести себя неподвижно. Исходя из этого, можно при необходимости определить линию берегов замёрзших и занесённых снегом водоёмов и рек.
При проведении таких тренировок возле реки у начинающего оператора появляются навыки, которые в дальнейшей работе могут пригодиться для поиска уже подземных вод. Если поиск подземных вод ведется с дневной поверхности, например на дачном участке, то подземный поток обнаруживается так же, как было описано выше. Направление движения подземного потока определяется по интенсивности вращения рамки в руках оператора. Определение глубины залегания водоносного слоя - задача более сложная. Чтобы более подробно разобраться в этом, необходимо знать, какие воды существуют в природе и как они распределяются по глубинам.
На рисунке 13 представлена классификация подземных вод по условиям залегания их в природе. Почвенные воды расположены у поверхности земли и образуются за счет инфильтрации атмосферных осадков, конденсации паров и других вод. Далее идет верховодка. Она имеет сезонный характер, и время её существования зависит от размеров водоупорной толщи. Эти воды изменчивы по качеству и могут загрязняться. Мощность этого водоносного слоя незначительна и зависит от климатических условий. За верховодкой следуют грунтовые воды. Из них формируются грунтовые бассейны и грунтовые потоки. Они стабильны и их уровень меняется незначительно. Качество воды хорошее.

| I- почвенные воды, II- верховодка, III- грунтовые воды, IV- межпластовые безнапорные воды, V- напорные (артезианские) воды; 1- капиллярная кайма, 2- уровень верховодки, 3- уровень грунтовых вод, 4- уровень межпластовых безнапорных вод, 5- пьезометрический уровень напорных вод, 6- водопроницаемые породы, 7- слабоводопроницаемые и водонепроницаемые породы, 8- водопроницаемые породы, 9- водонепроницаемые породы, 10- родник |
Рис.13 Классификация подземных вод в условиях залегания их в природе.
Весной или в начале лета, когда почвенные воды имеют наибольшую мощность водоносного горизонта, они могут отрицательно повлиять на результаты поиска. Чтобы уменьшить или, в некоторых случаях, даже исключить влияние этого фактора, необходимо начинать поиски воды с середины лета, когда установится баланс почвенных вод. Чаще всего в это время почвенные воды имеют незначительный водоносный слой, и их влияние на поиск не окажет значительного влияния. Если район поиска находится на возвышенности, поиск воды можно начинать раньше. Для поиска грунтовых вод самое подходящее время - глубокая осень. В это время водоносный слой верховодки имеет незначительную мощность, и его влияние на результаты поиска незначительно. Для питья эта вода пригодна лишь в экологически чистых районах. При любом из вышеописанных случаев поиска воды оператору необходима большая практика, без которой однозначного положительного результата может и не получиться.