Требования к содержанию и оформлению домашнего задания:
1) расчёты для построения ЛАЧХ неизменяемой части;
2) расчёты для построения ЛАЧХ желаемой системы;
3) графики ЛАЧХ неизменяемой части, ЛАЧХ и ЛФЧХ желаемой системы на миллиметровке или листе в клетку;
4) передаточная функция желаемой системы;
5) передаточная функция последовательного корректирующего устройства (если оно есть в задании);
6) ЛАЧХ и передаточная функция параллельного корректирующего устройства;
7) структурная схема системы с коррекцией (кроме вариантов, где схема уже задана);
8) проверка устойчивости внутреннего контура – при использовании параллельного корректирующего устройства;
9) структурная схема в Матлабе, ЛЧХ, переходной процесс до коррекции;
10) структурная схема в Матлабе, ЛЧХ, переходной процесс после коррекции;
11) выводы по результатам синтеза (сравнение показателей качества до коррекции, после коррекции и по ТЗ).
| Вариант | Задача |
Передаточная функция неизменяемой части имеет вид:
k = 200, T1 = 0,1 c, T2 = 0,02 c, T3 = 0,01 c, T4 = 0,005 с.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 200 с-1, добротность по ускорению Dуск = 36 с-2;
перерегулирование σмакс ≤ 30%,
время переходного процесса tп ≤ 0,8 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 200 с-1, добротность по ускорению Dуск = 36 с-2;
перерегулирование σмакс ≤ 30%,
время переходного процесса tп ≤ 0,8 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
Передаточная функция неизменяемой части имеет вид:
k = 120, T1 = 0,0005 c, T2 = 0,0001 c, T3 = 0,0001 c.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
ошибка слежения ε ≤ 20′ при Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
ошибка слежения ε ≤ 20′ при  и и  ;
перерегулирование σмакс ≤ 45%,
время переходного процесса tп ≤ 0,0425 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. ;
перерегулирование σмакс ≤ 45%,
время переходного процесса tп ≤ 0,0425 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
А) Выбрать последовательное корректирующее устройство для системы автоматического управления, если передаточная функция неизменяемой части имеет вид:
 k = 32, T1 = 0,05 c, T2 = 0,1 c, T3 = 0,2 c.
Скорректированная система должна удовлетворять следующим качественным показателям переходного процесса при ступенчатом изменении управляющего воздействия:
перерегулирование σмакс ≤ 30%,
время регулирования (время переходного процесса) tп ≤ 0,6 с.
Б) Выбрать параллельное корректирующее устройство для системы, сохранив требуемые в пункте А) показатели качетва. k = 32, T1 = 0,05 c, T2 = 0,1 c, T3 = 0,2 c.
Скорректированная система должна удовлетворять следующим качественным показателям переходного процесса при ступенчатом изменении управляющего воздействия:
перерегулирование σмакс ≤ 30%,
время регулирования (время переходного процесса) tп ≤ 0,6 с.
Б) Выбрать параллельное корректирующее устройство для системы, сохранив требуемые в пункте А) показатели качетва.
| |
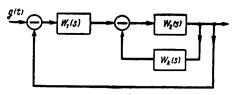
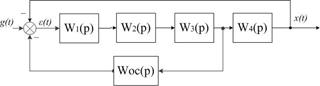
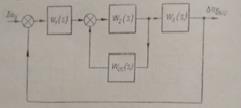
Определить передаточную функцию и параметры параллельного корректирующего устройства системы автоматического управления, схема которой представлена на рисунке.
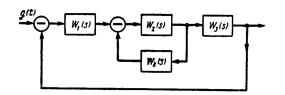 В неизменяемую часть входят звенья с передаточными функциями
В неизменяемую часть входят звенья с передаточными функциями
 k1 = 2,5, k2 = 100, k3 = 1, T1 = 0,07 c, T2 = 0,25 c, T3 = 0,4 c, ζ=0,7.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
К = 250;
перерегулирование σмакс ≤ 18%,
время переходного процесса tп ≤ 0,9 с.
k1 = 2,5, k2 = 100, k3 = 1, T1 = 0,07 c, T2 = 0,25 c, T3 = 0,4 c, ζ=0,7.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
К = 250;
перерегулирование σмакс ≤ 18%,
время переходного процесса tп ≤ 0,9 с.
| |
Передаточная функция неизменяемой части имеет вид:
k = 2, T1 = 0,25 c, T2 = 0,0025 c, T3 = 0,001 c, T4 = 0,001 с.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 2000 с-1, добротность по ускорению Dуск = 1170 с-2;
перерегулирование σмакс ≤ 40%,
время переходного процесса tп ≤ 0,175 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 2000 с-1, добротность по ускорению Dуск = 1170 с-2;
перерегулирование σмакс ≤ 40%,
время переходного процесса tп ≤ 0,175 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
Передаточная функция неизменяемой части имеет вид:
k = 300, T1 = 0,017 c, T2 = 0,005 c, T3 = 0,001 c.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
ошибка слежения ε ≤ 30′ при Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
ошибка слежения ε ≤ 30′ при  и и  ;
перерегулирование σмакс ≤ 40%,
время переходного процесса tп ≤ 0,7 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. ;
перерегулирование σмакс ≤ 40%,
время переходного процесса tп ≤ 0,7 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
| А) Выбрать последовательное корректирующее устройство для системы автоматического управления, если передаточная функция неизменяемой части имеет вид:
k = 600, T1 = 0,4 c, T2 = 0,03 c, T3 = 0,003 c.
Скорректированная система должна удовлетворять следующим качественным показателям переходного процесса при ступенчатом изменении управляющего воздействия:
перерегулирование σмакс ≤ 18%,
время регулирования (время переходного процесса) tп ≤ 0,9 с.
Б) Выбрать параллельное корректирующее устройство для системы, сохранив требуемые в пункте А) показатели качетва.
| |
Передаточная функция неизменяемой части имеет вид:
T1 = 0,2 c, T2 = 0,05 c,
T3 = 0,01 c, T4 = 0,008 с.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
коэффициент ошибки по положению С0 = 0,
коэффициент ошибки по скорости С1 = 0,004 c,
коэффициент ошибки по ускорению С2 = 0,03 c2,
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 1 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
коэффициент ошибки по положению С0 = 0,
коэффициент ошибки по скорости С1 = 0,004 c,
коэффициент ошибки по ускорению С2 = 0,03 c2,
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 1 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
Определить передаточную функцию и параметры параллельного корректирующего устройства системы автоматического управления, схема которой представлена на рисунке.
 В неизменяемую часть входят звенья с передаточными функциями
В неизменяемую часть входят звенья с передаточными функциями
  k1 = 40, k2 = 25, T1 = 0,013 c, T2 = 0,01 c,
T3 = 0,002 c, T4 = 0,02, T5 = 0,11 с, ζ=0,35.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 200 с-1, добротность по ускорению Dуск = 64 с-2;
перерегулирование σмакс ≤ 40%,
время переходного процесса tп ≤ 1 с.
k1 = 40, k2 = 25, T1 = 0,013 c, T2 = 0,01 c,
T3 = 0,002 c, T4 = 0,02, T5 = 0,11 с, ζ=0,35.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 200 с-1, добротность по ускорению Dуск = 64 с-2;
перерегулирование σмакс ≤ 40%,
время переходного процесса tп ≤ 1 с.
| |
Передаточная функция неизменяемой части имеет вид:
k = 20, T1 = 0,014 c, T2 = 0,005 c, T3 = 0,00125 c.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 400 с-1, добротность по ускорению Dуск = 81 с-2;
перерегулирование σмакс ≤ 35%,
время переходного процесса tп ≤ 0,6 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 400 с-1, добротность по ускорению Dуск = 81 с-2;
перерегулирование σмакс ≤ 35%,
время переходного процесса tп ≤ 0,6 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
Передаточная функция неизменяемой части имеет вид:
k = 1, T1 = 0,2 c, T2 = 0,04 c, T3 = 0,02 c, T4 = 0,005 c, ζ=0,75.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
ошибка слежения ε ≤ 1,5⁰ при и Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
ошибка слежения ε ≤ 1,5⁰ при и  ;
перерегулирование σмакс ≤ 25%,
время переходного процесса tп ≤ 0,8 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. ;
перерегулирование σмакс ≤ 25%,
время переходного процесса tп ≤ 0,8 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
| А) Выбрать последовательное корректирующее устройство для системы автоматического управления, если передаточная функция неизменяемой части имеет вид:
k = 100, T1 = 0,5 c, T2 = 0,5 c, T3 = 0,002 c.
Скорректированная система должна удовлетворять следующим качественным показателям переходного процесса при ступенчатом изменении управляющего воздействия:
перерегулирование σмакс ≤ 25%,
время регулирования (время переходного процесса) tп ≤ 0,25 с.
Б) Выбрать параллельное корректирующее устройство для системы, сохранив требуемые в пункте А) показатели качетва.
| |
Определить передаточную функцию и параметры параллельного корректирующего устройства системы автоматического управления, схема которой представлена на рисунке.
 В неизменяемую часть входят звенья с передаточными функциями
k1 = 30, k2 = 12, k3 = 1, T1 = 0,1 c, T2 = 0,003 c, T3 = 0,001 c.
В неизменяемую часть входят звенья с передаточными функциями
k1 = 30, k2 = 12, k3 = 1, T1 = 0,1 c, T2 = 0,003 c, T3 = 0,001 c.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 360 с-1, добротность по ускорению Dуск = 16 с-2;
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 0,25 с. Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 360 с-1, добротность по ускорению Dуск = 16 с-2;
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 0,25 с.
| |
Передаточная функция неизменяемой части имеет вид:
 k = 100, T1 = 5 c, T2 = 0,0125 c, T3 = 0,005 c.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 125 с-1, добротность по ускорению Dуск = 120 с-2;
перерегулирование σмакс ≤ 30%,
время переходного процесса tп ≤ 0,55 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
k = 100, T1 = 5 c, T2 = 0,0125 c, T3 = 0,005 c.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
добротность по скорости Dск = 125 с-1, добротность по ускорению Dуск = 120 с-2;
перерегулирование σмакс ≤ 30%,
время переходного процесса tп ≤ 0,55 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
Передаточная функция неизменяемой части имеет вид:
 k = 1, T1 = 0,04 c, T2 = 0,01 c, T3 = 0,002 c.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
ошибка слежения ε ≤ 12′ при
k = 1, T1 = 0,04 c, T2 = 0,01 c, T3 = 0,002 c.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
ошибка слежения ε ≤ 12′ при  и и  ;
перерегулирование σмакс ≤ 30%,
время переходного процесса tп ≤ 0,35 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. ;
перерегулирование σмакс ≤ 30%,
время переходного процесса tп ≤ 0,35 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
| Передаточная функция неизменяемой части имеет вид:
T1 = 0,1 c, T2 = 0,02 c,
T3 = 0,01 c, T4 = 0,005 с.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
коэффициент ошибки по скорости С1 = 0,005 c,
коэффициент ошибки по ускорению С2 = 0,06 c2,
система способна безошибочно отрабатывать постоянное воздействие,
перерегулирование σмакс ≤ 30%,
время переходного процесса tп ≤ 0,8 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
| |
А) Выбрать последовательное корректирующее устройство для системы автоматического управления, если передаточная функция неизменяемой части имеет вид:
k = 100, T1 = 0,05 c, T2 = 0,01 c, T3 = 0,003 c.
 Скорректированная система должна удовлетворять следующим качественным показателям переходного процесса при ступенчатом изменении управляющего воздействия:
перерегулирование σмакс ≤ 18%,
время регулирования (время переходного процесса) tп ≤ 0,3 с.
Б) Выбрать параллельное корректирующее устройство для системы, сохранив требуемые в пункте А) показатели качетва. Скорректированная система должна удовлетворять следующим качественным показателям переходного процесса при ступенчатом изменении управляющего воздействия:
перерегулирование σмакс ≤ 18%,
время регулирования (время переходного процесса) tп ≤ 0,3 с.
Б) Выбрать параллельное корректирующее устройство для системы, сохранив требуемые в пункте А) показатели качетва.
| |
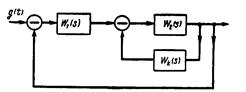
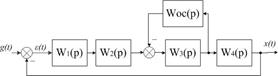
Определить передаточную функцию и параметры параллельного корректирующего устройства системы автоматического управления, схема которой представлена на рисунке.
 В неизменяемую часть входят звенья с передаточными функциями
В неизменяемую часть входят звенья с передаточными функциями
 k1 = 15, k2 = 8, k3 = 1, k4 = 1,5, T1 = 0,09 c, T2 = 0,3 c, T3 = 0,0015 c, T4 = 4,5 с.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 18%,
время переходного процесса tп ≤ 0,5 с.
k1 = 15, k2 = 8, k3 = 1, k4 = 1,5, T1 = 0,09 c, T2 = 0,3 c, T3 = 0,0015 c, T4 = 4,5 с.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 18%,
время переходного процесса tп ≤ 0,5 с.
| |
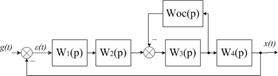
Определить передаточную функцию и параметры параллельного корректирующего устройства системы автоматического управления, схема которой представлена на рисунке.
 В неизменяемую часть входят звенья с передаточными функциями
В неизменяемую часть входят звенья с передаточными функциями
 k1 = 1, k2 = 50, k3 = 2, k4 = 2, T1 = 1,5 c, T2 = 1 c, T3 = 0,1 c, T4 = 0,15 с.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 3 с.
k1 = 1, k2 = 50, k3 = 2, k4 = 2, T1 = 1,5 c, T2 = 1 c, T3 = 0,1 c, T4 = 0,15 с.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 3 с.
| |
Определить передаточную функцию и параметры параллельного корректирующего устройства системы автоматического управления, схема которой представлена на рисунке.
 В неизменяемую часть входят звенья с передаточными функциями
k1 = 1,5, k2 = 25, k3 = 1, k4 = 2,5, T1 = 1 c, T2 = 0,6 c, T3 = 0,067 c, T4 = 0,08 с.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 2 с.
В неизменяемую часть входят звенья с передаточными функциями
k1 = 1,5, k2 = 25, k3 = 1, k4 = 2,5, T1 = 1 c, T2 = 0,6 c, T3 = 0,067 c, T4 = 0,08 с.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 2 с.
| |
| А) Выбрать последовательное корректирующее устройство для системы автоматического управления, если передаточная функция неизменяемой части имеет вид:
k = 600, T1 = 0,4 c, T2 = 0,018 c, T3 = 0,002 c.
Скорректированная система должна удовлетворять следующим качественным показателям переходного процесса при ступенчатом изменении управляющего воздействия:
перерегулирование σмакс ≤ 30%,
время регулирования (время переходного процесса) tп ≤ 1 с.
Б) Выбрать параллельное корректирующее устройство для системы, сохранив требуемые в пункте А) показатели качетва.
| |
Определить передаточную функцию и параметры параллельного корректирующего устройства системы автоматического управления, схема которой представлена на рисунке.
 В неизменяемую часть входят звенья с передаточными функциями
В неизменяемую часть входят звенья с передаточными функциями
 k1 = 10, k2 = 20, k3 = 1, T1 = 0,1 c, T2 = 1 c, T3 = 1,5 c.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 25%,
время переходного процесса tп ≤ 3 с.
k1 = 10, k2 = 20, k3 = 1, T1 = 0,1 c, T2 = 1 c, T3 = 1,5 c.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 25%,
время переходного процесса tп ≤ 3 с.
| |
| Определить передаточную функцию и параметры параллельного корректирующего устройства системы автоматического управления, схема которой представлена на рисунке.
В неизменяемую часть входят звенья с передаточными функциями
k1 = 1, k2 = 30, k3 = 1, k4 = 10, T1 = 0,75 c, T2 = 0,4 c, T3 = 0,05 c, T4 = 0,05 с.
Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
перерегулирование σмакс ≤ 20%,
время переходного процесса tп ≤ 1,5 с.
| |
Передаточная функция неизменяемой части имеет вид:
T1 = 0,05 c, T2 = 0,0001 c,
T3 = 0,004 c.
 Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
система с астатизмом первого порядка,
коэффициент ошибки по скорости С1 = 0,006 c,
коэффициент ошибки по ускорению С2 = 0,04 c2,
перерегулирование σмакс ≤ 35%,
время переходного процесса tп ≤ 0,5 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство. Провести частотный синтез таким образом, чтобы желаемая система автоматического управления удовлетворяла следующим требованиям:
система с астатизмом первого порядка,
коэффициент ошибки по скорости С1 = 0,006 c,
коэффициент ошибки по ускорению С2 = 0,04 c2,
перерегулирование σмакс ≤ 35%,
время переходного процесса tп ≤ 0,5 с.
А) Выбрать последовательное корректирующее устройство.
Б) Выбрать параллельное корректирующее устройство.
|