Введение.
Двигатели постоянного тока (ДПТ) широко используются в электроприводе.
Они обладают рядом преимуществ по сравнению с такими электрическими машинами, как синхронные и асинхронные двигатели. К этим преимуществам можно отнести относительную простоту изготовления, дешевизну, большой пусковой момент, управляемость.
Целью предлагаемого домашнего задания является закрепление теоретических знаний, полученных на лекциях и семинарских заданиях при самостоятельном расчете студентами различных режимов работы ДПТ.
Полный объем домашнего задания (ДЗ) по расчету основных характеристик ДПТ включает следующие пункты:
1. Расчет естественной механической характеристики n = f (M) и электромеханической характеристики n = f (I я).
2. Расчет искусственных механических характеристик n = f (M) ДПТ при различных способах регулирования угловой скорости n:
- при изменении напряжения источника питания U;
- при введении в цепь ротора ДПТ добавочного сопротивления
R я доб;
- при изменении потока возбуждения Ф.
3. Расчет искусственных механических характеристик n = f (M) ДПТ при различных способах электрического торможения:
- при генераторном торможении;
- при динамическом торможении;
- при торможении противовключением.
Методика расчета всех пунктов домашнего задания рассмотрена ниже.
Требования к оформлению отчета.
Отчет по выполненной расчетно-графической работе должен содержать:
1. Титульный лист (см. стр. 23).
2. Текст домашнего задания с приведением всех исходных данных рассматриваемого варианта.
3. Последовательное выполнение всех пунктов задания с приведением расчетных формул и подставляемых в них числовых значений (формула – подставляемые числа – ответ с единицами измерения).
4. При выполнении каждого пункта задания необходимо приводить краткие пояснения о сути выполняемых действий.
5. После выполнения расчетов по каждому пункту задания приводятся расчетные данные и строятся требуемые по заданию графики.
6. Графики должны быть построены аккуратно, в крупном масштабе, с помощью чертежных инструментов или с использованием ПЭВМ.
7. В конце каждого пункта задания необходимо сделать выводы по результатам проведенных расчетов.
8. Домашнее задание должно быть выполнено и представлено на проверку преподавателю в предусмотренные учебным планом сроки.
Содержание домашнего задания.
ДОМАШНЕЕ ЗАДАНИЕ ПО ТЕМЕ
«Двигатели постоянного тока»
Для двигателей постоянного тока выполнить следующие расчеты и построения:
1. Нарисовать электрическую схему включения двигателя постоянного тока (ДПТ) с параллельным возбуждением.
2. Рассчитать и построить естественные механическую n = f (M) и электромеханическую n = f (I я) характеристики. Определить частоту вращения nD при заданном моменте сопротивления MD = M Н∙ k на валу двигателя.
3. Рассчитать и построить на одном графике естественную и искусственные характеристики n = f (M) при различных способах регулирования частоты вращения n двигателя постоянного тока. Определить для каждого случая частоту вращения nD при заданном моменте сопротивления MD = M Н∙ k на валу двигателя:
а) при регулировании изменением напряжения сети (U ’ = U ∙ q 1);
б) при реостатном регулировании (R я доб = R я∙ q 2);
в) при изменении потока возбуждения (Ф’= Ф∙ q 1).
4. Рассчитать и построить на одном графике естественную и искусственные характеристики n = f (M) при различных способах торможения ДПТ:
а) при генераторном торможении, для n Т = n Н∙ h 1 и M Т = M Н∙ k;
б) при динамическом торможении, для n Т = nD и M Т = M Н∙ k;
в) при торможении противовключением:
n Т = n Н∙ h 2 и M Т = M Н∙ k для реостатного торможения;
n Т = nD и M Т = M Н∙ k для торможения с изменением полярности напряжения на обмотке якоря.
Расчет номинальных данных и построение
естественной механической характеристики n = f (M).
В качестве исходных данных приводятся следующие величины:
U н – номинальное напряжение двигателя, В;
P н – номинальная мощность двигателя, кВт;
n н – номинальная частота вращения ротора, об/мин;
η н – к.п.д., коэффициент полезного действия при номинальной
нагрузке, %;
R я – сопротивление обмотки якоря, Ом;
R доп пол – сопротивление обмотки дополнительных полюсов, Ом;
R возб – сопротивление обмотки возбуждения, Ом.
Полезной мощностью P 2 двигателя постоянного тока является механическая мощность, которая определяется через механические параметры по формуле: P 2 = M ∙Ω = M ∙(2π / 60)∙ n = 0.1047∙ M ∙ n,
где M – момент на валу двигателя; Ω – угловая скорость вращения ротора.
Используя номинальные данные P 2Н и n Н, можно вычислить номинальный вращающий момент двигателя:
M н = 9.55∙ P 2н / n н.
Здесь P 2н – в [Вт], n н – в [об/мин], M н – в [Н∙м].
Номинальная электрическая мощность, потребляемая из сети двигателем
P 1н = P 2н / η н.
Номинальный ток двигателя I н = P 1н / U н.
Номинальный ток возбуждения I вн = U н / R возб.
Номинальный ток обмотки якоря I ян = I н – I вн = P 1н / U н - U н / R возб.
Схема включения ДПТ с параллельным возбуждением изображена на рис. 1.

|
Рис. 1
Уравнение электрического состояния силовой цепи двигателя можно записать в виде:
U = E + I я∙(R я + R доп пол),
где Е = СЕ Ф∙ n – э.д.с. вращения; СЕ – коэффициент, определяемый конструктивными параметрами двигателя.
Уравнение электромеханической характеристики n = f (I я) имеет вид:
n = U /(СЕ ∙Ф(- I я∙(R я + R доп пол)/(СЕ ∙Ф) = n 0 – Δ n.
Учитывая, что M = CМ ∙Ф∙ I я, где CМ – коэффициент, определяемый конструктивными параметрами двигателя, получаем уравнение механической характеристики n = f (M):
n = U /(СЕ ∙Ф) - M ∙(R я + R доп пол)/(СЕ ∙ СМ ∙Ф2) = n 0 – Δ n.
Полученные выражения для характеристик n = f (I я) и n = f (M) имеют линейный характер при условии, что магнитная цепь двигателя не насыщена (см. рис. 2 характеристика 1).

Рис. 2
Постоянные коэффициенты kE =СЕ ∙Ф и kM = СМ ∙Ф можно определить по формулам:
СЕ∙Ф = Е н / n н и СМ ∙Ф = М н / I ян.
Для построения естественной механической n = f (M) и электромеханической n = f (I я) характеристик необходимо знать координаты двух точек:
1) n = n 0 при M = 0 и I я = 0 (режим холостого хода, Х.Х.);
2) n = n н при M = М н и I я = I ян (номинальный режим).
После построения графиков n = f (I я) и n = f (M) нужно определить частоту вращения ДПТ, соответствующую заданному моменту нагрузки на валу двигателя МD = M Н∙ k аналитически (по уравнению механической характеристики) и графически (по графику n = f (M)), а также рассчитать пусковой момент двигателя (при n = 0).
3. Расчет искусственных механических характеристик n = f (M) при различных способах регулирования частоты вращения двигателя постоянного тока.
3.1. Расчет характеристики n = f (M) при уменьшении напряжения источника питания в цепи якоря.
Влияние U на вид характеристики n = f ( M ).
Выражения для электромеханической характеристики n = f (I я) и механической характеристики n = f (M) имеют вид:
n = U /(СЕ ∙Ф(- I я∙(R я + R доп пол)/(СЕ ∙Ф) = n 0 – Δ n,
n = U /(СЕ ∙Ф) - M ∙(R я + R доп пол)/(СЕ ∙ СМ ∙Ф2) = n 0 – Δ n.
Как следует из приведенных выражений, при уменьшении напряжения на якорной обмотке U и неизменном магнитном потоке (Ф=const) n 0 уменьшается пропорционально U, а Δ n остается неизменным при одинаковых значениях момента М. Значит наклон характеристики n = f (M) не меняется.
При уменьшении напряжения (U ’= U ∙ q 1), приложенного к обмотке якоря, искусственная характеристика n ’= f (M), смещается вниз относительно естественной характеристики n = f (M).
Расчет искусственной характеристики n ’= f ( M ) (при U ’= U ∙ q 1).
Для построения искусственной характеристики n ’= f (M) в силу ее линейности достаточно рассчитать координаты двух точек, например:
1) для режима холостого хода:
М = 0; n 0’= U ’/(СЕ ∙Ф) = U ∙ q 1/(СЕ ∙Ф) = n 0∙ q 1;
2) при номинальной нагрузке:
М = М y; n ’н = U ’/(СЕ ∙Ф) – M н∙(R я + R доп пол)/(СЕ ∙ СМ ∙Ф2).
Естественную n = f (M) и искусственную n ’= f (M) характеристики нужно строить на общем графике.
Коэффициент регулирования кD при заданном MD.
Вычислить коэффициент регулирования кD частоты вращения n при изменении напряжения источника питания U ’= U ∙ q 1и при моменте нагрузки
MD = M н∙ k можно по формуле: кD = nD ’ / nD.
Где nD – частота вращения, соответствующая моменту MD, при работе ДПТ на естественной характеристике n = f (M), nD ’ - частота вращения, соответствующая моменту MD, при работе ДПТ на искусственной характеристике n ’= f (M) при том же моменте нагрузки MD и при пониженном напряжении U 1’= U 1∙ q 1.
Далее необходимо отметить преимущества и недостатки данного метода регулирования n и сделать выводы о целесообразности его применения.
3.2. Расчет характеристики n = f (M) при введении добавочного сопротивления R я доб в цепь якоря (реостатное регулирование).
Влияние R я доб на вид характеристики n = f ( M ).
Электрическая схема, соответствующая реостатному регулированию n ДПТ, приведена на рис.3.
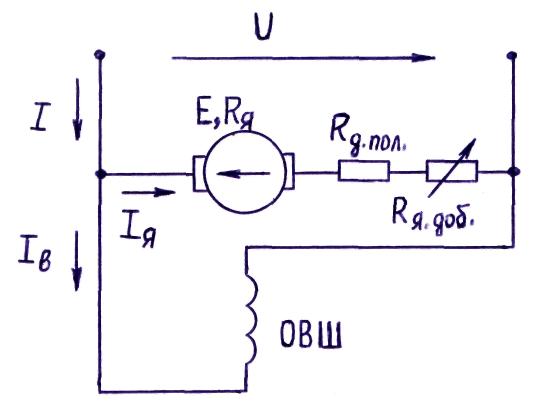
|
Рис. 3
Уравнение механической характеристики n ’= f (M) при использовании реостатного регулирования выглядит следующим образом
n ’= U /(СЕ ∙Ф) - M ∙(R я+ R доп пол+ R я доб)/(СЕ ∙ СМ ∙Ф2) = n 0 – Δ n.
При введении R я доб возрастает Δ n и увеличивается наклон характеристики n = f (M). При этом n 0 = U /(СЕ ∙Ф) не меняется, значит естественная и реостатная характеристики выходят из одной точки n 0 (режим холостого хода, М = 0).
Расчет реостатной характеристики n ’= f ( M ).
Для построения реостатной характеристики n ’= f (M) необходимо знать координаты двух точек:
1) режим холостого хода - n 0 = U /(СЕ ∙Ф) при М = 0;
2) номинальный режим - при М = МН
n ’н = U /(СЕ ∙Ф) – M н∙(R я + R доп пол + R я доб)/(СЕ ∙ СМ ∙Ф2).
Естественную n = f (M) и искусственную n ’= f (M) характеристики нужно строить на общем графике.
Коэффициент регулирования к D при заданном М D.
Коэффициент регулирования частоты вращения кD определяется по формуле: кD = nD ’/ nD,
где nD ’ = U /(СЕ ∙Ф) – MD ∙(R я+ R доп пол+ R я доб)/(СЕ ∙ СМ ∙Ф2); MD = М н∙ k; R я доб = R я∙ q 2.
Далее необходимо отметить преимущества и недостатки данного метода регулирования n и сделать выводы о целесообразности его применения.
3.3. Расчет характеристики n = f (M) при уменьшении потока возбуждения (полюсное регулирование).
Влияния потока возбуждения Ф на вид характеристики n = f ( M ).
На рис. 4 приведена электрическая схема, соответствующая регулированию частоты вращения n двигателя постоянного тока при уменьшении магнитного потока возбуждения (Ф’ = Ф∙ q 1).

|
Рис. 4
При введении добавочного сопротивления в цепь обмотки возбуждения
R в доб уменьшается ток возбуждения I в, уменьшается магнитный поток (Ф’< Ф), создаваемый обмоткой возбуждения.
В соответствии с уравнением механической характеристики
n ’ = U /(СЕ ∙ Ф’) – M ∙(R я + R доп пол)/(СЕ ∙ СМ ∙ (Ф’)2) = n 0’ – Δ n ’
при изменении магнитного потока Ф изменяются скорость холостого хода и наклон механической характеристики (n 0 и Δ n).
Для построения искусственной характеристики n ’= f (M) при Ф’= Ф∙ q 1 необходимо определить координаты двух точек:
а) режим Х.Х.: n 0’ = U /(СЕ ∙ Ф’) при М = 0;
б) при номинальной нагрузке: М = M н
n ’ = U /(СЕ ∙ Ф’) – M н∙(R я+ R доп пол)/(СЕ ∙ СМ ∙ (Ф’)2) = n 0’ – Δ n ’.
Естественную n = f (M) и искусственную n ’= f (M) характеристики нужно строить на общем графике.
Коэффициент регулирования к D при заданном MD.
Коэффициент регулирования частоты вращения n можно определить по формуле: кD = nD ’/ nD,
где nD ’ = U /(СЕ ∙ Ф’) – MD ∙(R я + R доп пол)/(СЕ ∙ СМ ∙ (Ф’)2); MD = M н∙ k; Ф’= Ф∙ q 1.
Далее необходимо указать преимущества и недостатки рассмотренного метода регулирования и сделать выводы о целесообразности его применения.
Затем следует провести сопоставление трех рассмотренных методов регулирования n.
4. Расчет искусственных механических характеристик n = f (M) при различных способах торможения ДПТ.
Далее рассматриваются три основных способа электрического торможения ДПТ:
- генераторное торможение;
- динамическое торможение;
- торможение противовключением.