Б И Л Е Т № 29
1. Влияние U2 , R2¢, f2 , на свойства и характеристики асинхронных электроприводов.
2. Система ТП-Д в зоне прерывистого режима как объект регулирования. Адаптивный регулятор тока.
3. Начертить и пояснить нагрузочную диаграмму и тахограмму работы электропривода валков непрерывного листового стана холодной прокатки.
1 Влияние U2 , R2 ¢, f2 , на свойства и характеристики асинхронных электроприводов.
Воспользуемся упрощенной схемой замещения:

В соответствии с этой схемой замещения ток:

Вращающий момент асинхронного двигателя может быть определен из выражения потерь  , откуда
, откуда  , где
, где  ,
,  . Подставляя значение тока I2`, получаем:
. Подставляя значение тока I2`, получаем:

критическое скольжение  ; + двигательный режим, - генераторный режим.
; + двигательный режим, - генераторный режим.
Критический момент  ,
,
после преобразования: 
 , где
, где  .
.
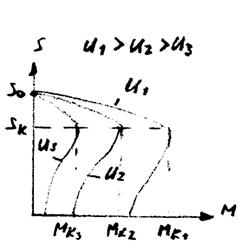
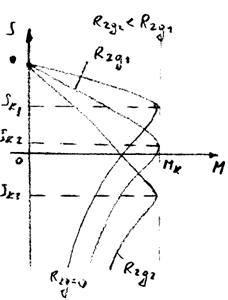
Исходя из этих выражений, можно определить влияние параметров:
U1: при уменьшении U1, уменьшается Mк ( ), поэтому этот тип двигателей чувствителен к колебаниям напряжения. При этом Sк=const.
), поэтому этот тип двигателей чувствителен к колебаниям напряжения. При этом Sк=const.
R2  : при увеличении
: при увеличении  , критический момент Мк=const; Sк увеличивается и может оказаться в зоне противовключения (4 квадрант) (
, критический момент Мк=const; Sк увеличивается и может оказаться в зоне противовключения (4 квадрант) ( ).
).
f1: при уменьшении f1 уменьшаются w0, и наоборот ( ). При уменьшении f1 увеличивается Мк (
). При уменьшении f1 увеличивается Мк ( ); уменьшается X1, X2
); уменьшается X1, X2  (X=2ПfL), значит увеличивается и Sк, но в меньшей степени. Увеличивается жесткость механических характеристик в рабочей зоне. Это характеризует частотное регулирование.
(X=2ПfL), значит увеличивается и Sк, но в меньшей степени. Увеличивается жесткость механических характеристик в рабочей зоне. Это характеризует частотное регулирование.
R1 , X1 , X2 : с увеличением этих параметров уменьшается Мк и Sк, w0=const. Изменением этих параметров скорость регулируют редко. (только при пуске).


Система ТП-Д в зоне прерывистого режима как объект регулирования. Адаптивный регулятор тока.
В системе ТП-Д при токе якоря

имеет место прерывистый режим. Когда существенно изменяются параметры объекта регулирования. В зоне прерывистого режима механические х-ки становятся нелинейными, изменяется регулировочная х-ка.

При  :
:  ;
;
 :
:  .
.
На рис.3.4.2 показаны- а)граничный режим( ); б)прерывистый режим(
); б)прерывистый режим( ). Процессы для тока заканчиваются на одном интервале проводимости, что эквивалентно исчезновению электромагнитной инерционности якоря (
). Процессы для тока заканчиваются на одном интервале проводимости, что эквивалентно исчезновению электромагнитной инерционности якоря ( ).
).
В зоне прерывистого тока  изменяется от в граничном режиме до бесконечности в режиме идеального холостого хода (
изменяется от в граничном режиме до бесконечности в режиме идеального холостого хода ( ).
).
На рис.3.4.3 показана структурная схема системы ТП-Д как объекта регулирования в прерывистом режиме.

В непрерывном режиме передаточная функция имеет вид:
 .
.
В зоне прерывистого режима передаточная функция имеет вид:
 .
.  .
.  .
.
 меняется от
меняется от  в граничном режиме до бесконечности в режиме идеального холостого хода.
в граничном режиме до бесконечности в режиме идеального холостого хода.
Т.о., структурная схема и параметры объекта существенно изменяются, объект становится нелинейным. Из-за этого САР в зоне прерывистого режима размыкается, динамические свойства резко ухудшаются и когда требуется повышенное качество работы САР, необходимо в зоне прерывистого режима принимать определенные меры.
 Для серии КТЭ регулирование тока якоря осуществляется адаптивным регулятором тока с эталонной моделью, реализованным на ячейке адаптации N210. Усилитель А1 является пропорционально – интегральным регулятором тока. Апериодическое звено, выполненное на усилителе А3, формирует сигнал эталонного переходного процесса. На усилителе А4 к сигналу выхода регулятора тока добавляется разность между сигналами эталонного и фактического переходного процессов.
Для серии КТЭ регулирование тока якоря осуществляется адаптивным регулятором тока с эталонной моделью, реализованным на ячейке адаптации N210. Усилитель А1 является пропорционально – интегральным регулятором тока. Апериодическое звено, выполненное на усилителе А3, формирует сигнал эталонного переходного процесса. На усилителе А4 к сигналу выхода регулятора тока добавляется разность между сигналами эталонного и фактического переходного процессов.
Эталонная модель позволяет сохранить удовлетворительными переходные процессы при неточной настройке регуляторов.
Адаптация в режиме прерывистых токов (изменение структуры регулятора тока на чисто интегральный, и увеличение коэффициента усиления РТ) реализована схемой адаптации. Генератор, G формирует пилообразные колебания Uп, которые на компараторе АU сравниваются с модулем сигнала с эталонной модели, то есть со средним значением тока двигателей. Пока среднее значение сигнала Id превышает амплитуду пилообразного напряжения, напряжение с компаратора АU=0. При ослаблении сигнала среднего значения тока до величины пилообразного напряжения Uп, под действием напряжения с АU РТ становится чисто интегральным и уменьшая входное сопротивление регулятора, тем самым увеличивая его коэффициент передачи в прерывистом режиме.
В данной схеме увеличение быстродействия в контуре регулирования тока при прерывистом характере тока достигается за счет изменения структуры регулятора тока при вхождении в прерывистый режим. В режиме непрерывного тока результирующая регулятора тока определяется:

При вхождении в зону прерывистых токов будет:
 ;
;  причем
причем  .
.
Изменение структуры регулятора при переходе от ПИ к И режиму осуществляется ключем К2. Для того, чтобы исключить переходный процесс связанный с изменением параметров РТ, переключение осуществляется методом широтно-импульсной модуляции, при этом частота модуляции на порядок выше частоты пульсации тока якоря. С этой целью управление К2 осуществляется с помощью компаратора напряжения AU, на входе которого сравнивается сигнал с выхода генератора пилообразного напряжения G и модуль главной составляющей сигнала задания на ток.
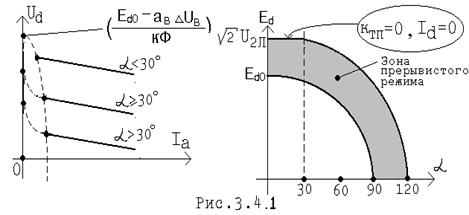
Амплитуда пилообразного напряжения выбирается исходя из величины сигнала задания на ток, соответствует величине гранично-непрерывного тока в рабочей зоне преобразования (правый рисунок).
В прерывистом режиме на время, в которое среднее значение меньше пилообразного напряжения, компаратор AU закрывает ключ К2, происходит адаптация к прерывистому режиму. Время адаптации тем больше, чем глубже прерывистый режим.