ФУНДАМЕНТАЛЬНЫХ СИСТЕМ БЕЗРАЗМЕРНЫХ КОМПЛЕКСОВ.
МАТРИЦА РЕШЕНИЙ
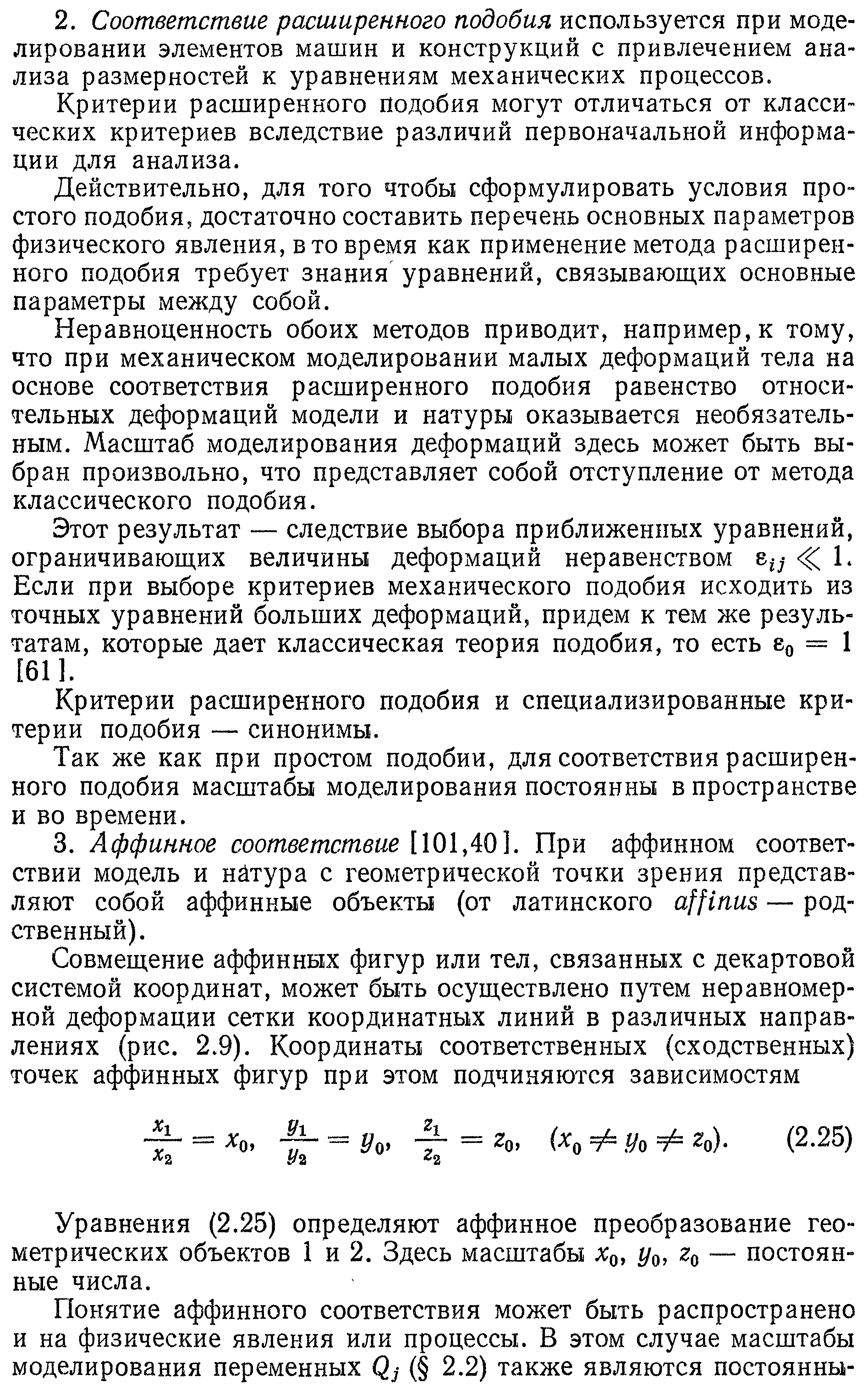
Рассмотрим перечень основных параметров (1.6), приведенных в § 1.2 для задачи о динамическом нагружении упругого тела, и получим для этого случая систему независимых безразмерных комплексов.
В соответствии с предположением (1.18), положенным в основу π -теоремы анализа размерностей, будем искать общее выражение для неизвестного безразмерного отношения в форме

Здесь  — показатели степени, подлежащие определению. В число основных параметров с целью упрощения выкладок включена лишь одна искомая величина — частота колебаний ω. Матрица размерностей в технической системе единиц МКГСС (см. табл. 1.1) о базисом L1 (м), L2 (кгс), L3 (с) имеет вид
— показатели степени, подлежащие определению. В число основных параметров с целью упрощения выкладок включена лишь одна искомая величина — частота колебаний ω. Матрица размерностей в технической системе единиц МКГСС (см. табл. 1.1) о базисом L1 (м), L2 (кгс), L3 (с) имеет вид
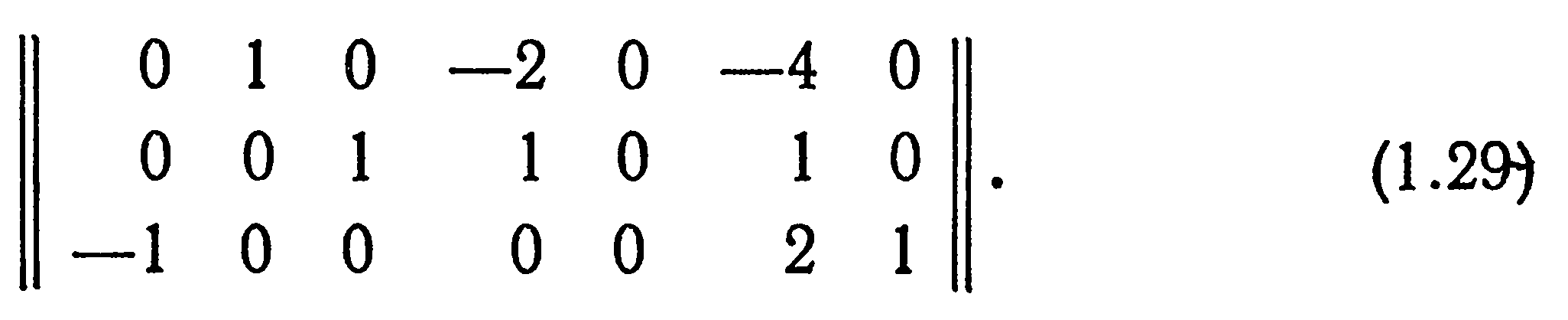
Пользуясь матрицей размерностей (1.29) и формулой размерности (1.4), подсчитаем размерность произведения (1.28):
 \
\
откуда, учитывая свойства показательных функций, найдем

Условие безразмерноcти произведения π приводит к системе алгебраических уравнений для неизвестных показателей хj:
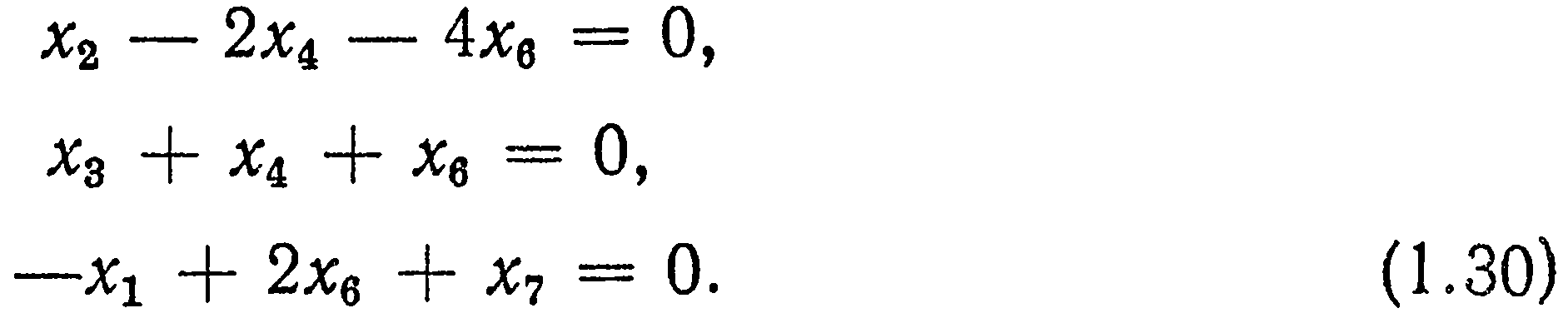
Любое решение системы линейных однородных уравнений (1.30) дает набор показателей степени для безразмерных комплексов π.
Анализ этой системы показывает, что числовые коэффициенты при неизвестных xj каждого из уравнений представляют собой строки матрицы размерностей. Поэтому уравнения для показателей степени xj безразмерного комплекса π могут быть написаны непосредственно, исходя из числовых значений элементов матрицы (1.29).
Особенностью системы (1.30) является отсутствие среди искомых показателей степени xjнеизвестного х5, что является следствием безразмерности коэффициента Пуассона ν. Поэтому величина х5 остается неопределенной и может принимать любые конечные числовые значения.
Система (1.30) содержит три уравнения с шестью неизвестными и, следовательно, имеет неограниченное число решений. Любое из них может быть выражено через три показателя степени, например через x4, х6 и x7:

Ввиду того, что показатели x4 х5,х6 и х7 произвольны, будем последовательно полагать:
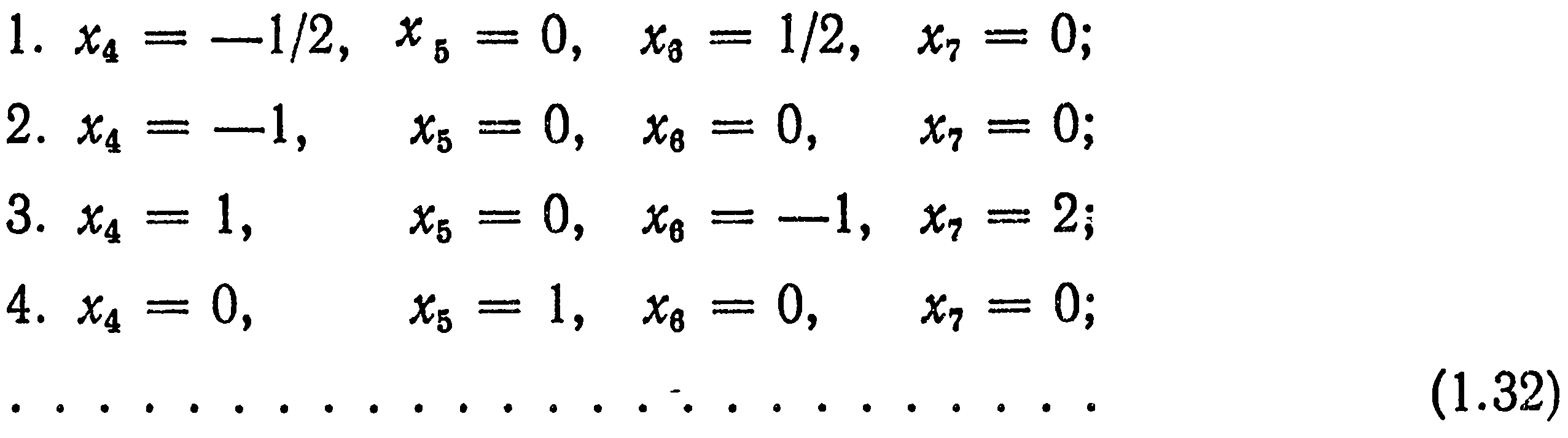
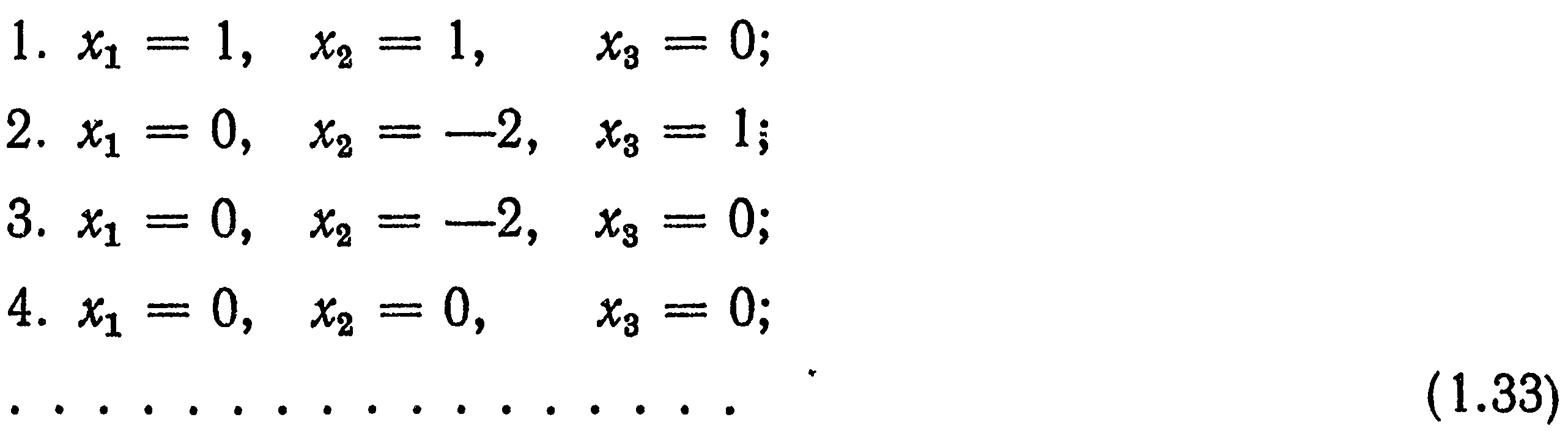
Остальные показатели степени Xj находят по формулам (1.31):
КЛАССИЧЕСКАЯ ТЕОРИЯ МЕХАНИЧЕСКОГО ПОДОБИЯ И МОДЕЛИРОВАНИЯ
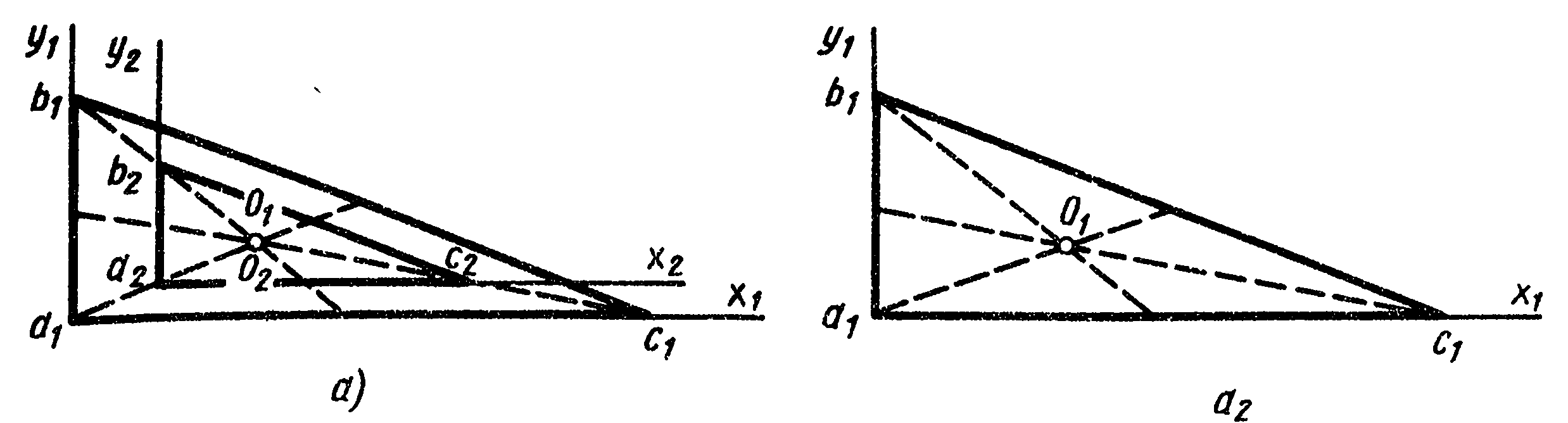
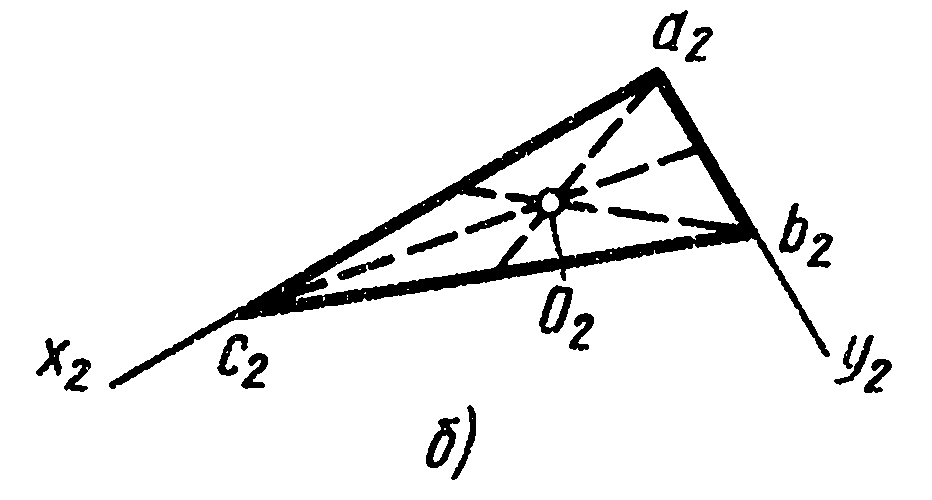
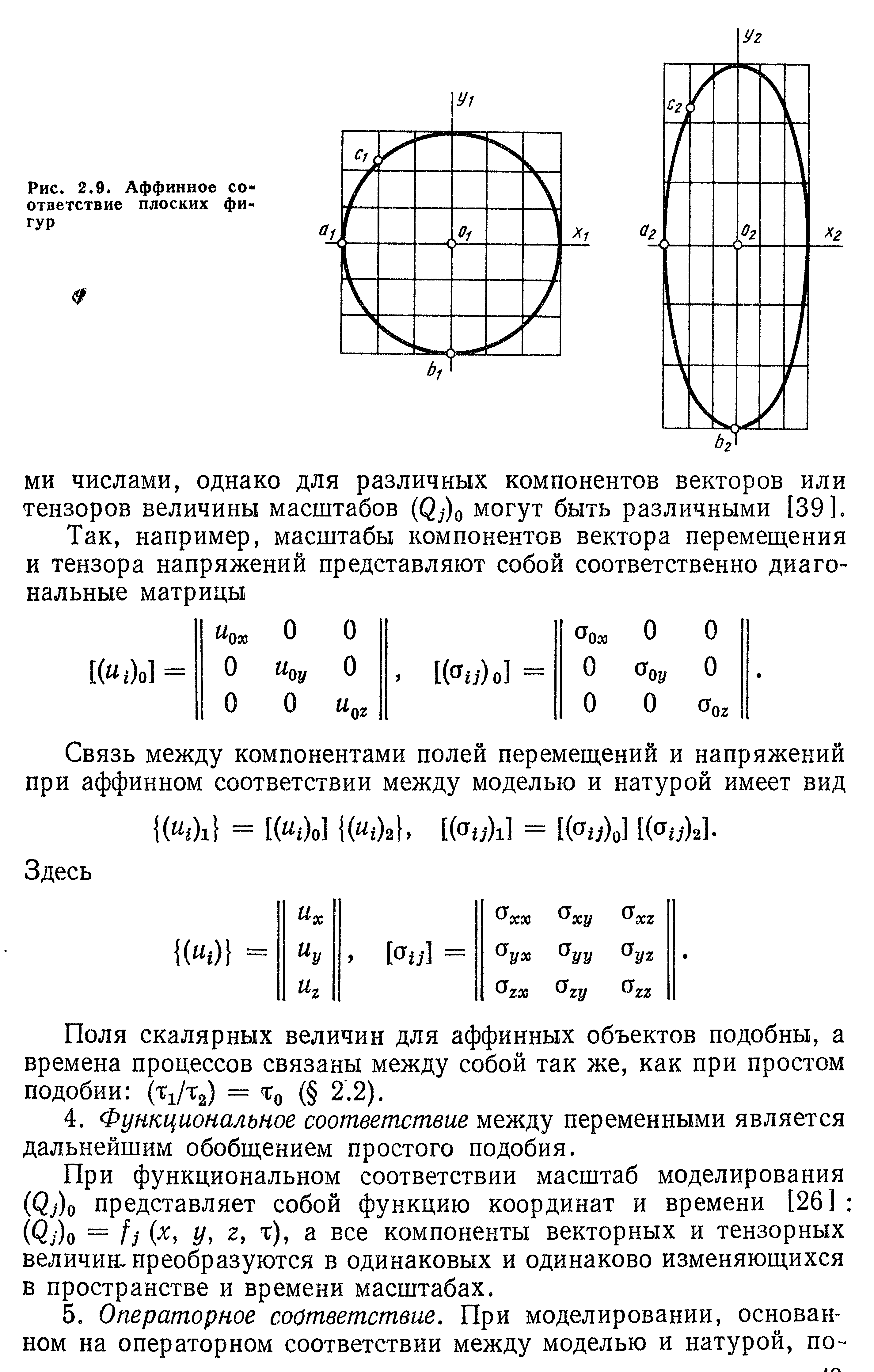
Рис. 2.1. Геометрически подобные плоcкие фигуры,сходственного (а) и несходственно (б) расположенные.
элементы (точки, линии, поверхности) при этом называютсясходствеными.
Очевидно, что две геометрически подобные фигуры, расположенные сходственным образом, можно путем поступательных перемещений и поворотов расположить совершенно произвольным образом одна относительно другой (рис. 2.1. Хотя в этом случае относительное расположение фигур в целом и не является сходственным, для соответственных элементов геометрически подобных фигур (точки а1 и а2, в1 и в2, линии b1c1 и в2с2 и т. п.) сохраняется понятие сходственных элементов,
Для каждой из сходственных точек геометрически подобных тел 1 и 2 справедливы соотношения