

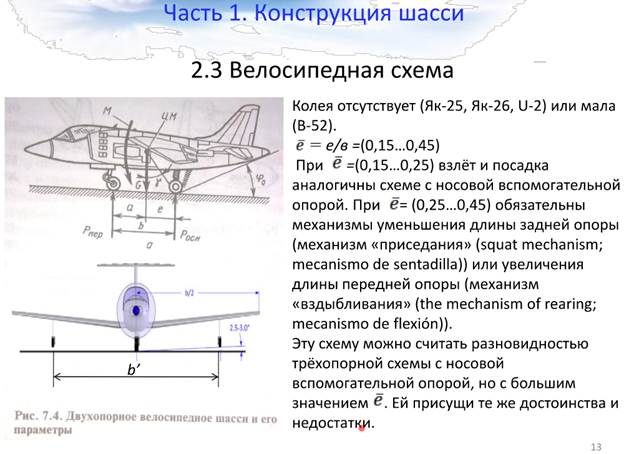
42. Велосипедная схема шасси
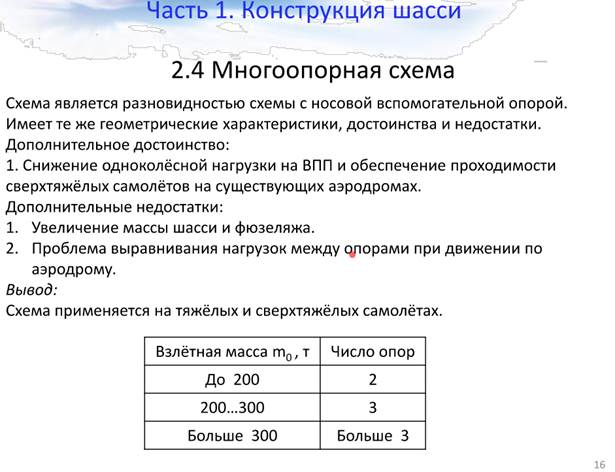
43. Многоопорная схема шасси


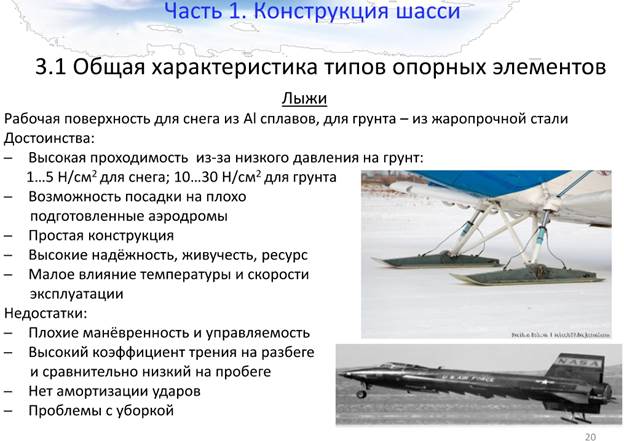
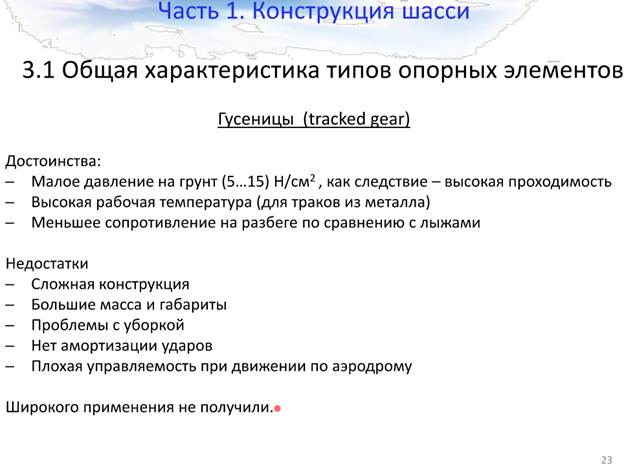
44. Характеристика опорных элементов шасси

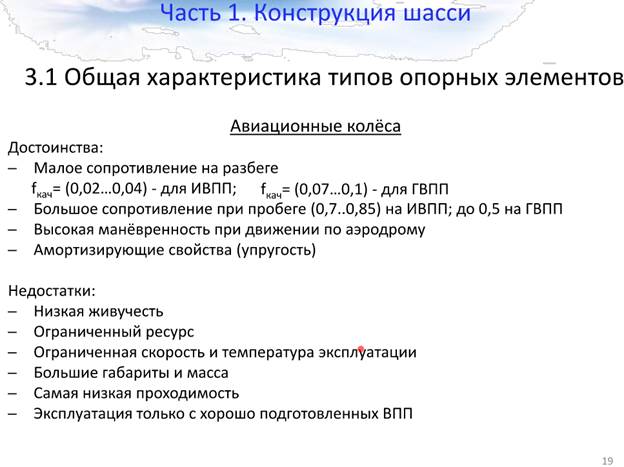



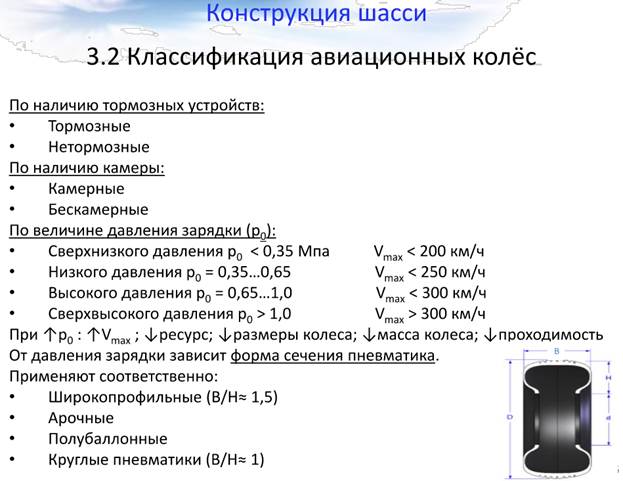
45. Классификация авиационных колёс
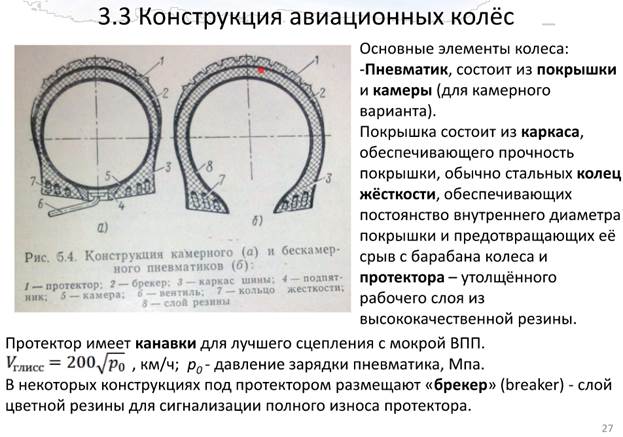
46. Конструкция колеса. Подбор колёс.

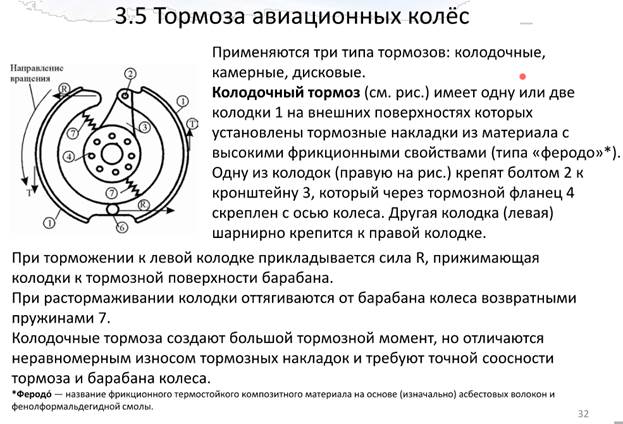
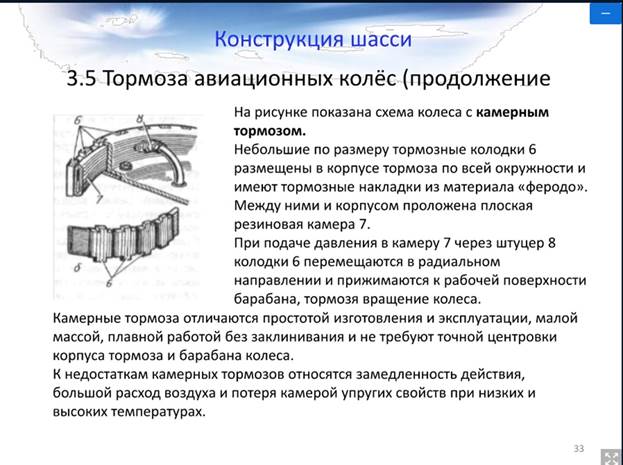
47. Тормоза авиаколёс. Повышение эффективности тормозов
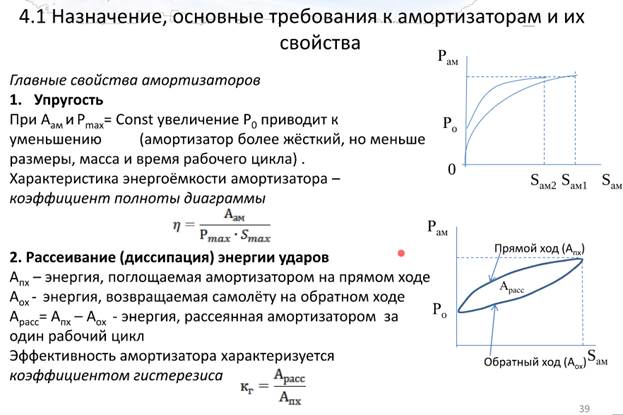
48. Назначение, основные требования к амортизаторам и их свойства
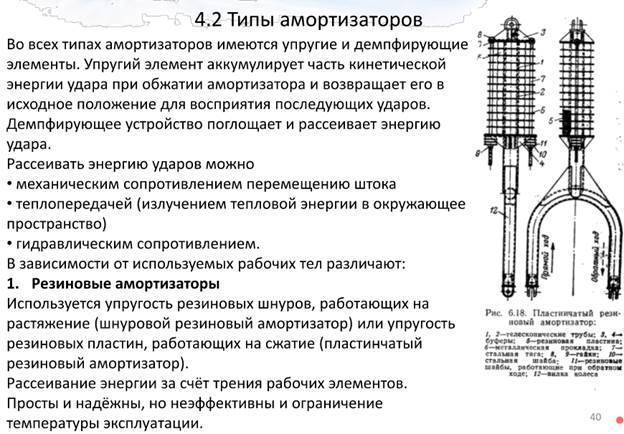
49. Типы амортизаторов и их характеристика
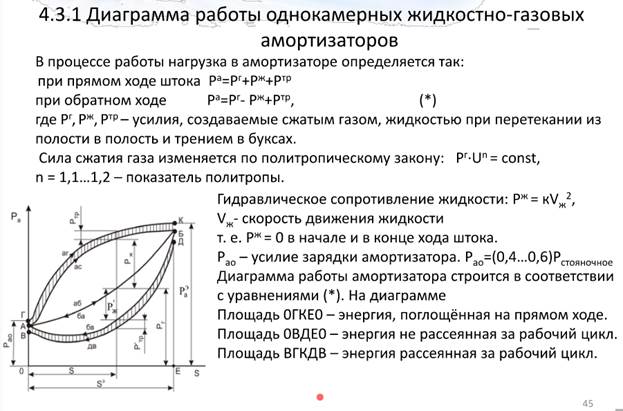
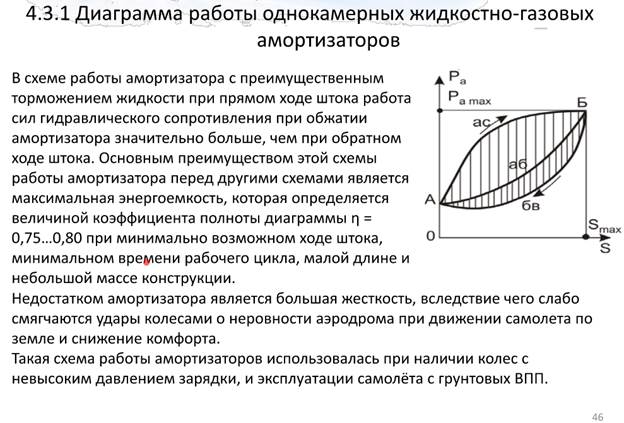
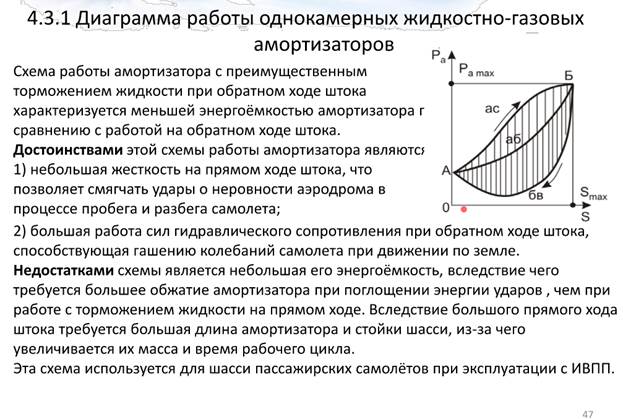
50. Устройство и диаграмма работы однокамерных жидкостно-газовых амортизаторов

СИСТЕМА УПРАВЛЕНИЯ САМОЛЁТА
51. Основные требования к системе управления самолёта. Органы управления
Органы управления
Органы управления обеспечивают продольное, поперечное и путевое управление.
Продольное управление осуществляется рулем высоты, шарнирно подвешенным к неподвижному стабилизатору.
Для повышения эффективности продольного управления может использоваться комбинация руля высоты и подвижного стабилизатора, угол установки которого может изменяться в полете с помощью дополнительного привода.
На сверхзвуковых скоростях полета продольное управление обеспечивается управляемым стабилизатором, угол установки которого изменяется в полете командным рычагом продольного управления.
Отклонением органов продольного управления в полете изменяется аэродинамическая сила на горизонтальном оперении, что приводит к изменению угла атаки крыла.
Поперечное управление обеспечивается элеронами, установленными на концах крыла в хвостовой его части. Правый и левый элероны всегда отклоняются в противоположные стороны и за счет дифференциального изменения подъемной силы крыла создают кренящий момент самолета. На стреловидных крыльях большого удлинения эффективность элеронов падает, что связано с развитием концевых срывов на крыле, а также большими деформациями кручения крыла при отклонении элеронов. В этом случае в дополнение к элеронам на верхней поверхности крыла устанавливаются интерцепторы, которые при отклонении элерона вверх отклоняются в ту же сторону и, вызывая срыв потока на крыле, дают дополнительную силу крена, повышая тем самым эффективность поперечного управления. При отклонении элерона вниз интерцептор прижат к крылу и не работает.
Путевое управление самолетом обеспечивается рулем направления, который шарнирно подвешивается на киле. Цельноповоротный управляемый киль используется очень редко.
В некоторых случаях для управления самолетом используются комбинированные органы управления, выполняющие функции двух рулевых поверхностей. Так, на самолетах без горизонтального оперения («бесхвостка», «летающее крыло») по задней кромке крыла
устанавливаются элевоны, выполняющие функции рулей высоты и элеронов. На сверхзвуковых истребителях может использоваться дифференциальный стабилизатор, который при синхронном отклонении обеих половин в одну сторону исполняет роль органа продольного управления, а при дифференциальном отклонении этих половин в разные стороны - роль органа поперечного управления. У самолетов с V-образным оперением рулевые поверхности выполняют функции руля высоты и руля направления. На некоторых самолетах используются зависающие элероны, которые при синхронном отклонении вниз выполняют функции закрылка.
Все комбинированные органы управления отклоняются управляющими сигналами двух самостоятельных каналов управления. В этом случае должно быть обеспечено независимое отклонение рулевой поверхности сигналами каждого из этих каналов, что достигается установкой в проводку управления специального смесительного механизма.
Отклонение рулевых поверхностей в полете можно разделить на балансировочные и маневренные. Балансировочные отклонения обеспечивают уравновешивание всех действующих на самолет сил и моментов, что является необходимым условием для выполнения длительных установившихся режимов полета самолета. Маневренные отклонения рулей создают неуравновешенные аэродинамические силы и моменты, которые обеспечивают выполнение самолетом того или иного маневра. Обычно маневрирование носит кратковременный характер.
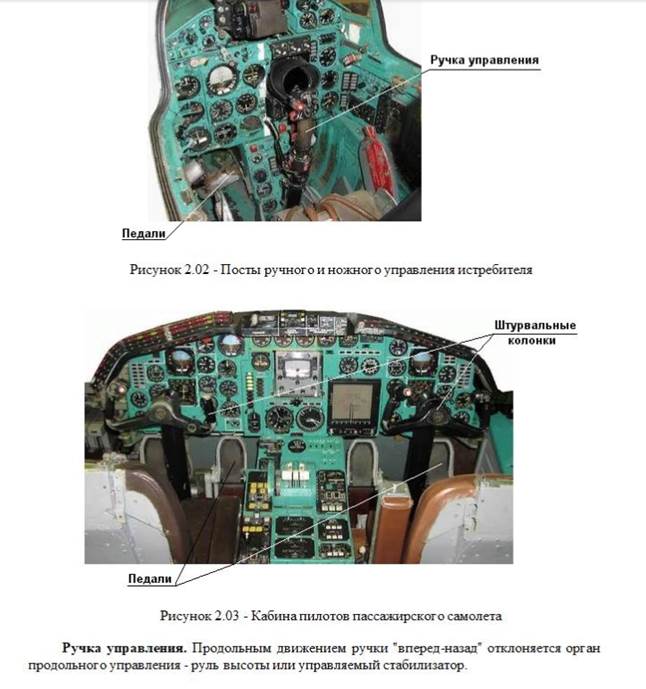
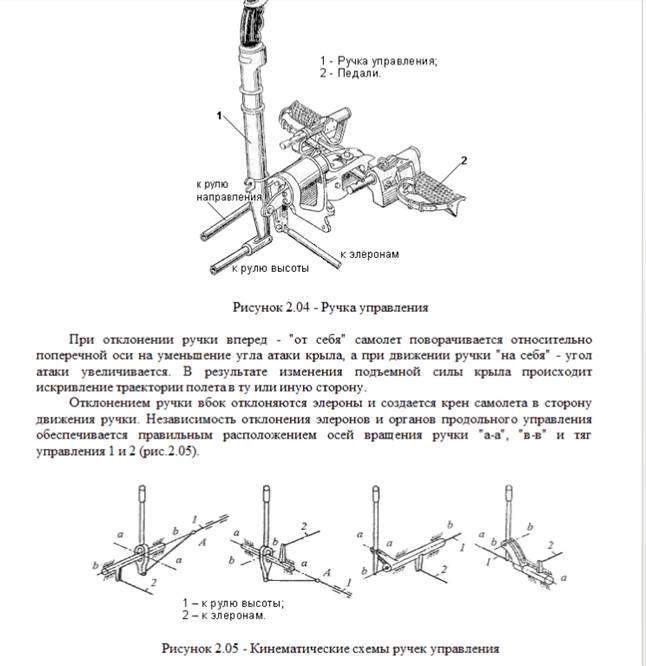
52. Командные посты ручного управления
53. Командные посты ножного управления
2.3.2. Командные посты ножного управления
Посты ножного управления выполняются в виде педалей, закрепленных на горизонтально или вертикально расположенных рычагах. Еще одна разновидность - скользящие педали широкого распространения не получили.
Педали с горизонтальными рычагами закрепляются на рычажно-параллелограммном механизме с вертикальной осью вращения (рис.2.08)
Рисунок 2.08 - Педали с горизонтальными рычагами
К основному горизонтальному рычагу присоединяется проводка управления 1 рулем направления. Параллелограммный механизм обеспечивает поступательное движение педали и ноги летчика без их разворачивания. Для регулировки по росту подножки педалей переставляются относительно рычажного механизма и стопорятся специальными фиксаторами.
Педали с вертикальными рычагами выполняются в виде качающихся рычагов с горизонтальной осью вращения, которая располагается вверху или внизу (рис.2.09).
Рисунок 2.09 - Педали с вертикальными рычагами
Качающиеся педали с верхним расположением оси подвески (рис.2.10) закрепляются на опорах 3,12, 15 и поворачиваются относительно оси 7 в вертикальной плоскости.
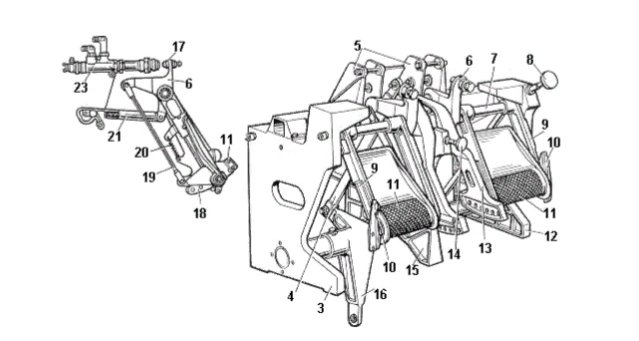
Рисунок 2.10 - Качающиеся педали с вертикальными рычагами
Усилие с педалей 11 тягами 4 передается на трехплечую качалку 16 и далее к рулю направления. Качалка 16 обеспечивает движение педалей в разные стороны. Каждая педаль при отжатом фиксаторе 10 может переставляться относительно сектора 13, связанного с трехплечей качалкой, что обеспечивает регулировку педалей по росту. Нажатием носком ноги на верхнюю часть педали усилие передается на тормозной редукционный клапан 23, обеспечивая торможение колес шасси. На стоянке редукционные клапаны могут фиксироваться в нажатом положении с помощью кнопки 8 и механизма 21, обеспечивая стояночное торможение.
Качающиеся педали с нижним расположением оси вращения (рис.2.11) состоят из двух подножек 4, которые установлены на вертикальных рычагах 2, шарнирно закрепленных на кронштейне 12. Каждый рычаг связан тягами 1 с валом 14, к которому присоединяется тяга руля направления 15.
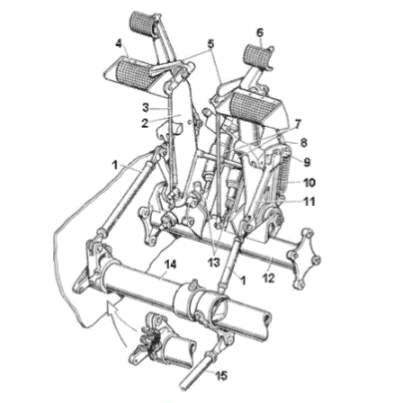
Рисунок 2.11 - Педали с нижним расположением оси вращения
На каждой педали смонтированы тормозные подножки 6, передающие движение к тормозным редукционным клапанам 7. Для регулировки по росту отклонением вбок рукоятки 5 поднимается вверх регулировочная гребенка 9, связанная с рычагом педали, и штифт кронштейна 11 может переставляться в один из трех пазов регулировочной гребенки. При отпускании рукоятки 5 пружина 10 опускает гребенку вниз и обеспечивает соединение рычага педали с кронштейном 11.
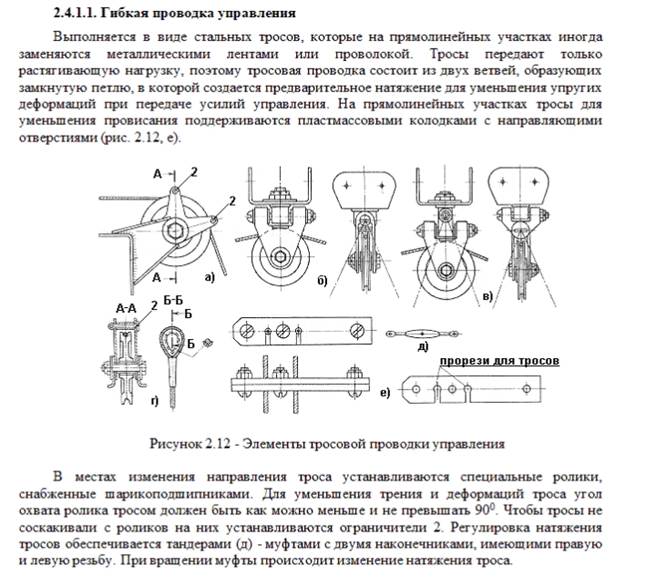
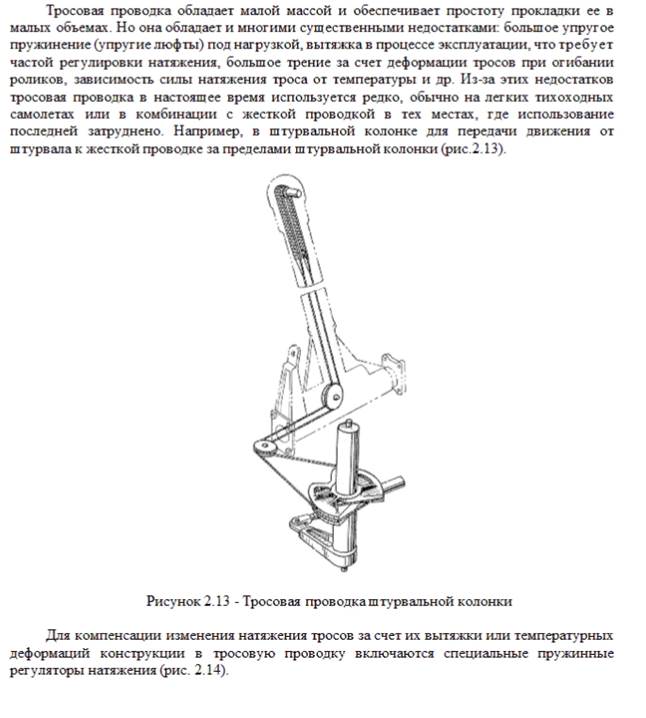
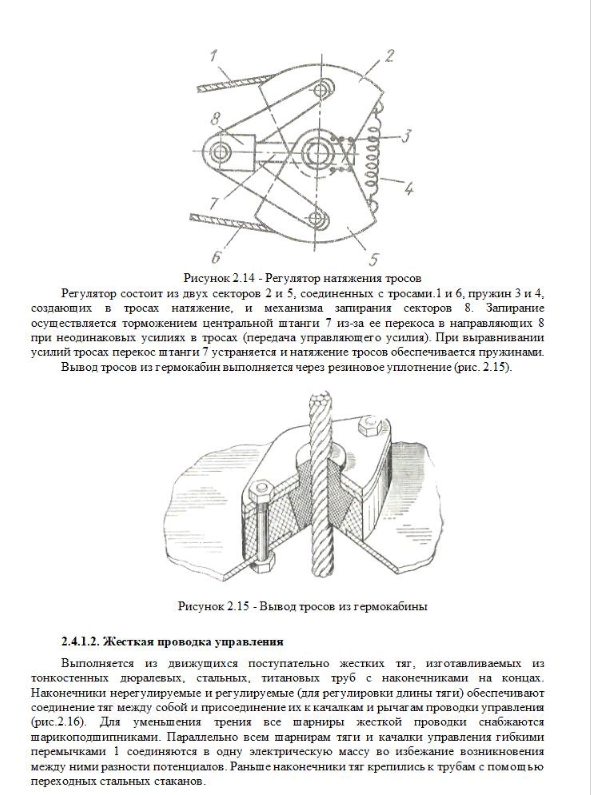
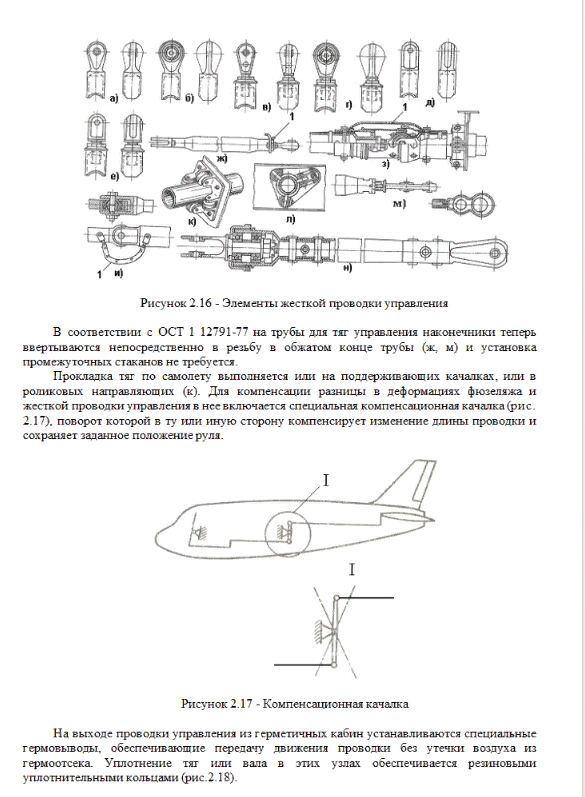
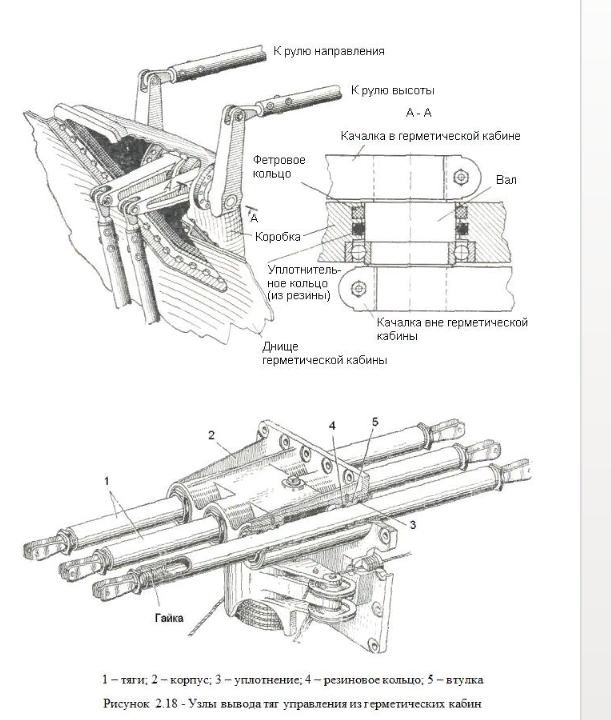
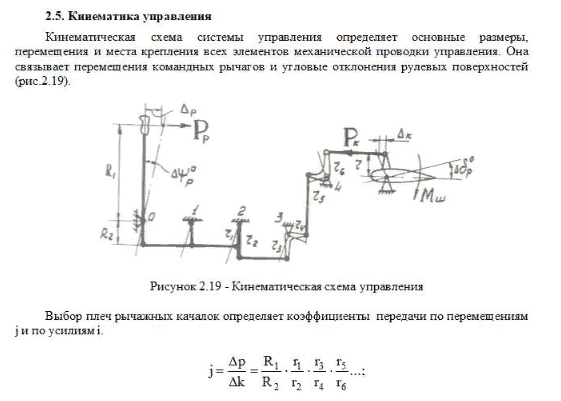
54. Гибкая и жёсткая проводка управления. Конструкция. Достоинства и недостатки
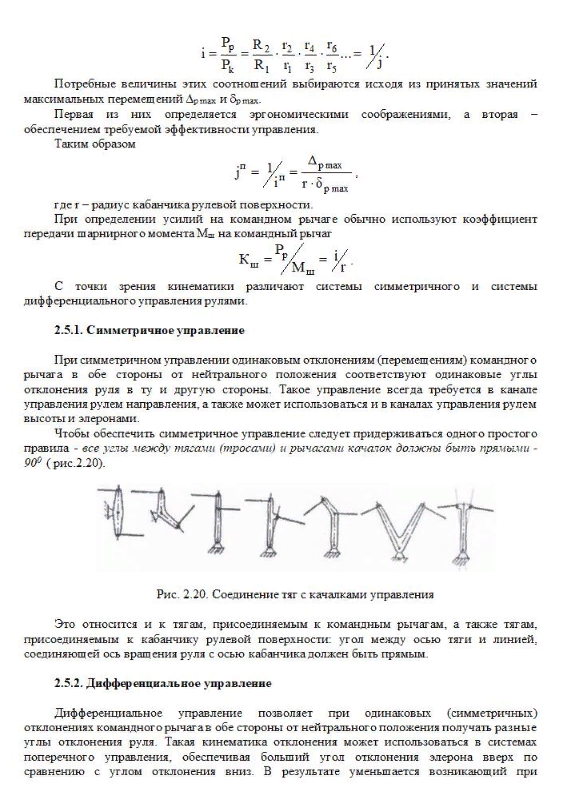
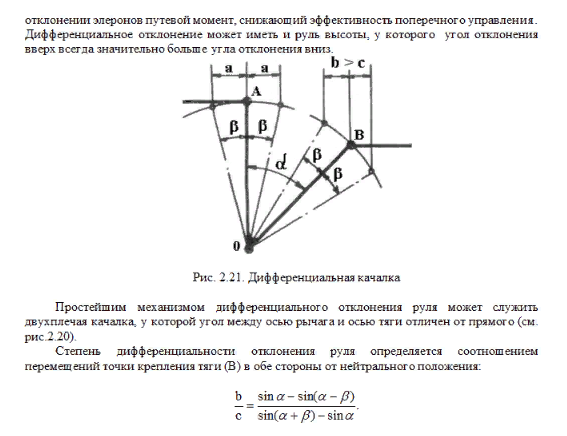
55. Кинематика управления. Симметричное и дифференциальное управление
56. Усилия управления. Способы уменьшения маневренных усилий управления
Усилия управления
Усилие на командном рычаге управления может быть выражено через шарнирный момент на руле:
Pр= Кш mш Sр bр q,
где Kш =δрmax/xрmax - коэффициент передачи от командного рычага к рулю,
δрmax - максимальный угол отклонения руля в радианах,
xрmax - максимальное перемещение командного рычага,
mш - коэффициент шарнирного момента руля,
Sр -площадь руля,
bр - хорда руля,
q - скоростной напор.
Коэффициент шарнирного момента при малых углах отклонения руля линейно зависит от величины этого угла. Отсюда следует, что в полете усилие на командном рычаге прямо пропорционально углу отклонения руля и величине скоростного напора. Такая зависимость усилий вполне естественна для летчика. Она позволяет летчику по усилию судить о режиме полета, интенсивности выполняемого маневра и о перегрузке в криволинейном полете (рис. 2. 24)
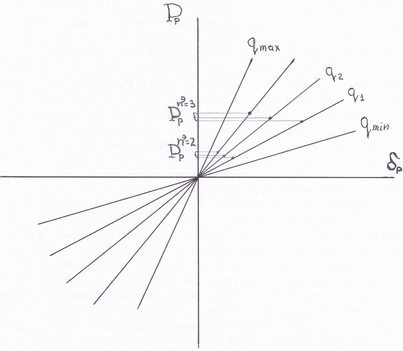
Рис. 2.24. Зависимость усилий управления от угла отклонения руля и скоростного напора
Возникающие в полете усилия управления можно разделить на балансировочные и маневренные.
Балансировочные усилия управления действуют в длительном установившемся режиме полета и обеспечивают уравновешивание (балансировку) самолета на этом режиме. Такие усилия лишь утомляют летчика и поэтому от них желательно избавиться.
Снятие балансировочных усилий с командных рычагов обеспечивается установкой на рулях триммеров - небольших поверхностей, шарнирно подвешенных в хвостовой части руля, и имеющих дополнительное, обычно электромеханическое, управление от летчика (рис.2.25).
 |
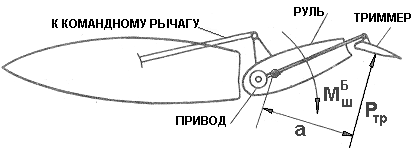
Рисунок 2.25 - Схема работы триммера
С помощью электрического переключателя летчик отклоняет триммер в сторону, противоположную отклонению руля и добивается полного уравновешивания шарнирного момента триммером. В результате будет достигнута балансировка самолета при нулевых усилиях на командных рычагах. В системах управления с необратимым бустером шарнирный момент руля полностью воспринимается этим бустером, а усилия на командных рычагах, в том числе и балансировочные, создаются специальными загрузочными механизмами. В этом случае триммеры на рулях не ставятся, а балансировочные усилия, приходящие от загрузочного механизма, снимаются специальным устройством, включенным в конструкцию загружателя.
Маневренные усилия управления возникают при выполнении самолетом кратковременных маневров. Эти усилия необходимы летчику для естественного чувства управления, по ним он судит о поведении самолета, интенсивности выполняемого маневра и о перегрузке. Маневренные усилия должны укладываться в строго регламентированные нормы, выработанные длительной летной практикой. Для больших по размерам самолетов, для самолетов с большой скоростью полета приходится предусматривать специальные меры по снижению маневренных усилий.