Основными средствами снижения усилий на командных рычагах являются устройства, позволяющие уменьшать коэффициент шарнирного момента mш. Для этого используется энергия набегающего потока воздуха, поэтому такие средства принято называть аэродинамической компенсацией рулей.
К аэродинамической компенсации относятся: роговая, осевая, внутренняя компенсации, а также простой или пружинный сервокомпенсатор.
Первые три вида компенсации используют общий принцип: часть поверхности руля располагается спереди от оси вращения руля и создает относительно этой оси момент, уменьшающий шарнирный момент руля.
Сервокомпенсатор по размерам и конструкции аналогичен триммеру, но летчиком не управляется (рис. 2.26, а).
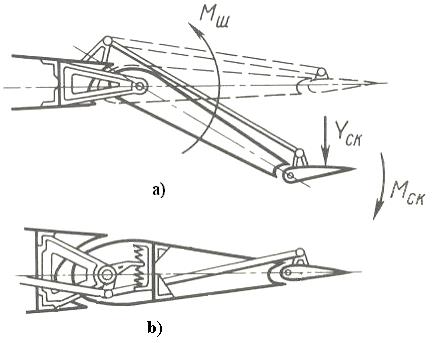
Рис. 2.26. Работа сервокомпенсатора
Он отклоняется автоматически при отклонении руля за счет кинематической связи тягой с неподвижной точкой на конструкции, к которой подвешен руль. Отклонение сервокомпенсатора в противоположную рулю сторону уменьшает шарнирный момент руля. Такой сервокомпенсатор работает по углу отклонения руля, что иногда может привести к перекомпенсации и слишком малым усилиям управления. Более совершенным является пружинный сервокомпенсатор (рис. 2.26, в). Включение в конструкцию пружины с предварительной затяжкой обеспечивает работу такого компенсатора по усилиям управления – его угол отклонения пропорционален усилию в тяге управления.
Другим принципом снижения усилий управления является уменьшение размеров руля без снижения эффективности управления. Этот принцип используется в системах управления с серворулями, в системах управления с интерцепторами, в системах продольного управления с подвижным стабилизатором.
В системах управления с серворулями летчик командными рычагами отклоняет вспомогательную поверхность - серворуль, который подвешен шарнирно в хвостовой части основного руля (рис.2.27).
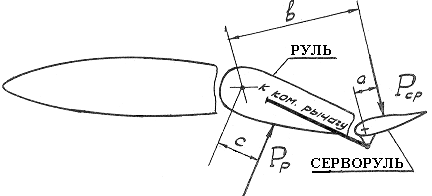
Рисунок 2.27 - Схема работы серворуля
Его размеры в несколько раз меньше основного руля. Он отклоняется в сторону, противоположную по отношению к отклонению основного руля, который свободно закреплен на своей оси вращения. При отклонении серворуля возникающее на нем усилие Рср отклоняет руль в противоположную сторону до тех пор, пока не уравновесятся моменты Рср b = Рр с.
За счет разницы плеч "b" и "с" усилие на руле получается значительно больше усилия на серворуле, что и обеспечивает нужное движение самолета. Летчик на командном рычаге ощущает усилие от серворуля малых размеров. Основным недостатком такого управления является некоторое запаздывание в отклонении и работе основного руля.
Система управления с интерцепторами используется в комбинации их с элеронами уменьшенных размеров, что обеспечивает снижение усилий управления. Интерцепторы отклоняются дополнительным приводом и их отклонение не влияет на усилия на штурвале. Отклонение интерцептора повышает эффективность поперечного управления и компенсирует ее потери из-за уменьшения размеров элеронов.
Система управления с подвижным стабилизатором позволяет уменьшать размеры руля высоты и снижать усилия на его отклонение, а требуемая эффективность продольного управления на взлете и посадке обеспечивается перестановкой стабилизатора на меньший угол атаки. Угол отклонения стабилизатора изменяется дополнительным приводом и летчик усилий на его отклонение не затрачивает.
Все перечисленные способы снижения усилий управления обеспечивают получение приемлемых усилий лишь на умеренных дозвуковых скоростях полета и у самолетов сравнительно небольших размеров. На тяжелых и сверхзвуковых самолетах добиться нужных усилий управления можно лишь путем подвода в систему управления дополнительной энергии с помощью специальных усилителей - бустеров, которые частично или полностью воспринимают усилия от шарнирных моментов рулей.
57. Принципиальная схема бустерного управления. Распределительное устройство
Система бустерного управления состоит из источника энергии, распределительного устройства, исполнительного механизма и обратной связи, передающей сигнал с выхода исполнительного механизма на вход распределительного устройства (рис.3.01)
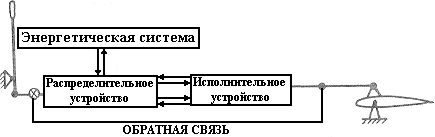
Рисунок 3.01 - Принципиальная схема бустерного управления
Три последних элемента выполняются в виде единого агрегата, называемого бустером и включаемого в проводку управления самолетом между командным рычагом и рулем.
В качестве энергетической системы обычно используется гидросистема с постоянным рабочим давлением pо.