Цель изучения темы: освоить описание сложных систем, методом пространства состояний. Научиться составлять векторно-матричную стандартную форму Коши (ВМСФК).
С методом пространства состояний, получением векторно-матричной стандартной формы Коши для одномерных и многомерных систем ознакомиться в лекционном курсе или в [ 1, 4, 5 ]
Получение векторно-матричной стандартной формы Коши (ВМСФК)
Одномерные системы
Задание
1 Ознакомиться с теорией.
2 Получить вариант задания у преподавателя.
3 Проанализировать схему.
4 Ввести обозначения. Выбрать базис пространства состояний.
5 Составить дифференциальные уравнения для каждого интегратора.
6 Сформировать матрицы А, В, С, D.
7 Составить векторно-матричную стандартную форму Коши (ВМСФК).
8 Составить отчет о выполненной работе.
Варианты заданий
Таблица 3.1 – Варианты заданий
| № варианта | |||||||||||||||
| № схемы | |||||||||||||||
| №варианта | |||||||||||||||
| № схемы |
Схема1 
Схема2

Схема3

Схема4

Схема5

Схема6

Схема7

Схема8

Схема9
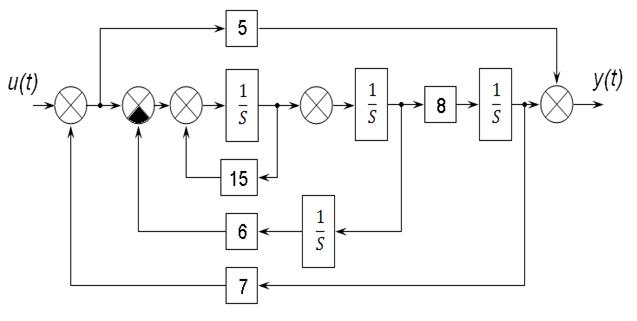
Схема10

Схема11

Схема12

Схема13

Схема14

Схема15

Схема16

Схема17
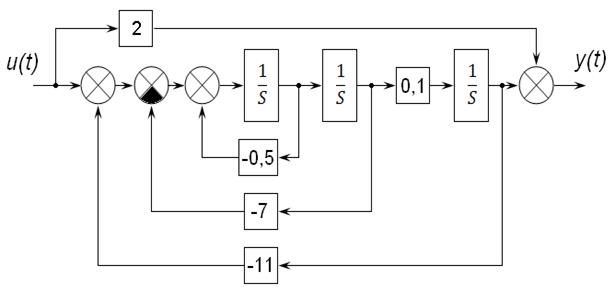
Схема18

Схема19

Схема20

Схема21

Схема22

Схема23

Схема24

Схема25

Схема26

Схема27
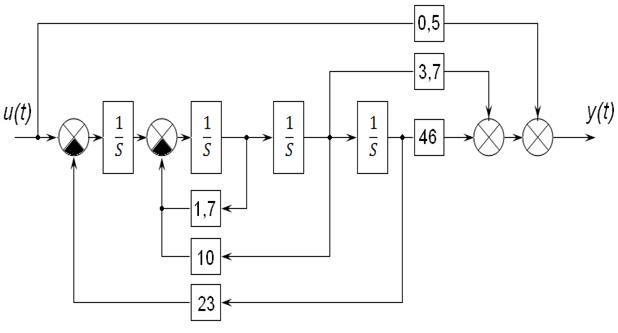
Схема28

Схема29
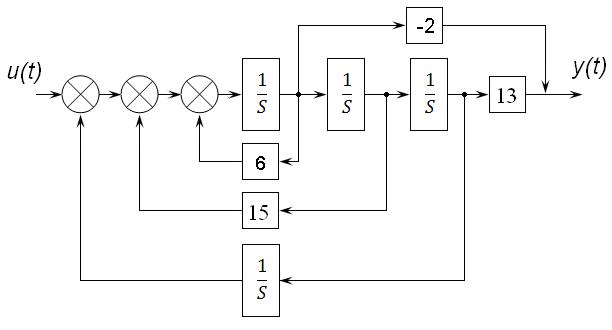
Схема30

Многомерные системы
Задание
1 Ознакомиться с теорией.
2 Получить вариант задания у преподавателя.
3 Проанализировать схему.
4 Ввести обозначения. Выбрать базис пространства состояний.
5 Составить дифференциальные уравнения для каждого интегратора.
6 Сформировать матрицы А, В, С, D.
7 Составить векторно-матричную стандартную форму Коши (ВМСФК).
8 Составить отчет о выполненной работе.
Варианты заданий
Таблица 3.2 – Варианты заданий
| № варианта | |||||||||||||||
| № схемы | |||||||||||||||
| №варианта | |||||||||||||||
| № схемы |
Схема1

Схема2

Схема3

Схема4

Схема5

Схема6

Схема7

Схема8

Схема9

Схема10

Схема11

Оценка управляемости и наблюдаемости методом пространства состояний
Цель изучения темы: научиться оценивать управляемость и наблюдаемость с помощью теорем Калмана.
С критериями оценки управляемости и наблюдаемости для линейных стационарных систем ознакомиться в лекционном курсе или в [ 1, 4, 5 ]
Задание
1 Ознакомиться с теорией.
2 Для системы, заданной структурной схемой в пункте 3.1.1, составить матрицы управляемости и наблюдаемости.
3 Для матриц управляемости и наблюдаемости оценить их ранг; оценить управляемость и наблюдаемость по теоремам Калмана.
4 Составить отчет о выполненной работе
Варианты заданий
Варианты заданий соответствуют вариантам в 3.1.1 и 3.1.2
Канонические формы в пространстве состояний
Цель изучения темы: является ознакомление с описанием и исследованием динамических систем управления в пространстве состояний.
С канонические формами в пространстве состояний ознакомиться в лекционном курсе или в [ 1, 4, 5 ]
Задание
1 Ознакомиться с теорией.
2 Для системы, заданной структурной схемой в пункте 3.1.1, по матрицам пространства состояний { A, B, C, D }, с помощью встроенной функции Matlab ss2tf, сформировать передаточную функцию системы.
3 Выделить характеристический полином вида
 (3.1)
(3.1)
4 Составить преобразующую матрицу P по следующему алгоритму
 (3.2)
(3.2)
 (3.3)
(3.3)
 (3.4)
(3.4)
...
 (3.5)
(3.5)
где  ,
,  , - коэффициенты характеристического полинома, А, В – исходные матрицы.
, - коэффициенты характеристического полинома, А, В – исходные матрицы.
4 выполнить проверку
 =0 (3.6)
=0 (3.6)
5 Перевести исходные матрицы состояния системы в каноническую форму управляемости с помощью преобразующей матрицы Р.
 (3.7)
(3.7)
 (3.8)
(3.8)
Варианты заданий
Варианты заданий соответствуют вариантам в 3.1.1 и 3.1.2
3.4 Контрольные вопросы
1 Дайте понятие пространства состояния системы?
2 Как составляются уравнения пространства состояния по схемам
моделирования?
3 Векторно-матричная стандартная форма Коши (ВМСФК), название
уравнений?
4 Вектора (названия и смысловое содержание) и матрицы (название и
смысловое содержание)?
5 Обобщенная структурная схема ВМСФК?
6 Выбор базиса пространства состояний. Обозначения динамических
звеньев?
7 Размерность систем. Размерность векторов ВМСФК?
8 Управляемость системы. Теорема Калмана I. Физический смысл понятия
управляемости?
9 Наблюдаемость системы. Теорема Калмана II. Физический смысл
понятия наблюдаемости?