ЛАБОРАТОРНАЯ РАБОТА №3
«ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ»
СНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Ротором называется тело. Совершающее вращательное движение в опорах.
При вращении роторов, из-за погрешностей изготовления и сборки, неоднородности материала, возникают центробежные силы, вызывающие дополнительные динамические давления. Так как центробежные силы вращаются вместе с ротором, то их дополнительное давление на опоры определяют динамическую составляющую полного давления, которая поворачивается за один оборот ротора на угол равный 360° (рис.1).

Рис.1
На рис.1: Q – статическая составляющая полного давления ротора на опору от постоянных по напряжению сил (силы, действующие в передачах, силы тяжести и т.п.); С – динамическая составляющая полного давления ротора на опору; R – полное давление ротора на опору.
Из рис.1 видно, что полное давление ротора на опору меняется за один оборот ротора по величине от Rmax = Q + C до Rmin = Q – C и по направлению в пределах угла a, величина которого зависит от соотношения статической и динамической составляющих (с увеличением  величина a увеличивается).
величина a увеличивается).
Если динамические составляющие давлений на опоры ротора не равны нулю, то ротор считается неуравновешенным.
Различают три вида неуравновешенности роторов: статическую, моментную и динамическую.
Статической называется неуравновешенность, при которой центр тяжести масс ротора не лежит на его оси, а главная центральная ось инерции параллельна ей (рис.2, а).

Рис.2, а
Моментной называется неуравновешенность, при которой ось ротора и его главная центральная ось инерции пересекаются в центре масс ротора (рис2,в).

рис2, в
Динамической называется неуравновешенность, при которой ось ротора и его главная центральная ось инерции пересекаются не в центре масс или пересекаются (рис.2, г).

рис.2, г
Статическая неуравновешенность ротора характеризуется векторной величиной равной произведению массы ротора на радиус-вектор центра масс ротора относительно его оси, получившей название дисбаланса.
 ,
,
где  – дисбаланс ротора;
– дисбаланс ротора;
m – масса ротора;
 – радиус-вектор центра масс ротора.
– радиус-вектор центра масс ротора.
Вектор дисбаланса перпендикулярен оси ротора, проходит через центр масс и вращается вместе с ротором. Направление вектора дисбаланса совпадает с направлением радиуса-вектора центра масс ротора. Радиус-вектор центра масс ротора называется эксцентриситетом. Модуль эксцентриситета равен расстоянию центра масс ротора до его оси.
Установление статической неуравновешенности может быть осуществлено добавлением к ротору добавочной массы, называемой корректирующей, дисбаланс которой равен по величине и противоположен по направлению дисбалансу ротора (рис.2, б).
 ,
,
где  - дисбаланс корректирующей массы;
- дисбаланс корректирующей массы;
 - масса корректирующего грузика;
- масса корректирующего грузика;
 - радиус-вектор центра масс корректирующего грузика.
- радиус-вектор центра масс корректирующего грузика.
Процесс определения модуля и углового положения дисбаланса ротора и устранение или уменьшение его добавлением корректирующей массы называется статической балансировкой.
Плоскость установки корректирующей массы выбирается из условия возможности и удобства размещения ее на роторе.
После установки корректирующей массы главная центральная ось инерции ротора может изменить свое угловое положение и составить с осью ротора некоторый угол a (рис.2, б), что приводит к возникновению моментной неуравновешенности. Величина неуравновешенного момента (рис.3) будет:


Рис.3
Указанный недостаток рассмотренного способа устранения статической неуравновешенности ограничивает его использование роторами, имеющими малую длину (диски), и роторами, вращающимися с малыми угловыми скоростями.
Моментная неуравновешенность полностью определяется главным моментом дисбалансов ротора или двумя равными по значению антипараллельными векторами дисбалансов, лежащими в двух произвольных плоскостях, перпендикулярных оси ротора.
Значение величины главного момента дисбалансов будет:
 ,
,
где МD – главный дисбаланс ротора;
 - центробежные моменты инерции ротора, ось вращения которого совпадает с осью Z, а начало координат находится в центре масс.
- центробежные моменты инерции ротора, ось вращения которого совпадает с осью Z, а начало координат находится в центре масс.
Для устранения моментной неуравновешенности нужно добавить к ротору не менее двух корректирующих масс, дисбалансы которых образуют пару с моментом равным по величине и противоположным по направлению главному моменту дисбалансов ротора.
 .
.
Динамическая неуравновешенность состоит из статической и моментной неуравновешенностей и полностью определяется главным вектором и главным моментом дисбалансов ротора или двумя векторами дисбалансов, в общем случае разных по значению и непараллельных, лежащих в двух произвольных плоскостях, перпендикулярных оси ротора («крест дисбалансов»).
Для устранения динамической неуравновешенности нужно в двух выбранных плоскостях уравновешивания добавить к ротору корректирующие массы, дисбалансы которых равны и противоположны векторам дисбалансов ротора, приведенных к плоскостям уравновешивания, образующих «крест дисбалансов». Плоскости уравновешивания перпендикулярных к оси ротора выбираются конструктором исходя из возможности и удобства установки корректирующих грузиков или удаления материала с противоположной стороны.
Процесс определения значений дисбалансов корректирующих масс (противовесов) и их положения в выбранных плоскостях уравновешивания и установка противовесов, приводящих к устранению или уменьшению как статической, так и моментной неуравновешенности, называется динамической балансировкой.
Так как дисбалансы масс ротора, возникающие при изготовлении ротора, неизвестны ни по величине, ни по их положению на роторе, то дисбалансы корректирующих масс определяются экспериментально на специальных балансировочных станках.
Балансировочные станки по принципу работы можно разделить на три группы.
Станки первой группы позволяют определить динамические составляющие давления на неподвижные подшипники от сил, вращающихся вместе с ротором.
Станки второй группы имеют подшипники, установленные на упругих опорах, которые независимо друг от друга могут колебаться под действием динамических составляющих давления ротора. При балансировке эти динамические давления уравновешиваются силами, создающимися специальным механическим или электромагнитным устройством, и колебания опор прекращаются. Величина дисбаланса и его угловое положение определяются по показаниям отсчетного устройства.
Станки третьей группы, также как и станки второй группы, имеют подшипники установленные на упругих опорах, или жестко закрепленные в специальной раме, совершающей колебания относительно одной из своих опор. Для определения величины дисбаланса и его углового положения используется амплитуда колебаний подвижных опор или рамы, получившей название маятниковой.
Балансировка на станках всех трех групп может выполняться в автоматическом и неавтоматическом режимах.
Лабораторная работа по динамической балансировке роторов предусматривают проведение балансировки в одной из плоскостей уравновешивания на станках с маятниковой рамой. Балансировка выполняется в неавтоматическом режиме. Плоскость уравновешивания задается преподавателем.
Балансировочный станок

Рис.4
На рис.4 изображена схема балансировочного станка с маятниковой рамой, на которой
1 - маятниковая рама
2 - жесткая опора маятниковой рамы
3 - упругая опора маятниковой рамы
4 - стойки для установки подшипников ротора
5 - устройство для измерения амплитуды колебания маятниковой рамы
6 - станина
7 - балансируемый ротор
I - I и II - II - плоскости уравновешивания
L - расстояние между плоскостями I - I и II - II.
Представим динамическую неуравновешенность ротора в виде двух дисбалансов DI и DII, приведенных к плоскостям уравновешивания I - I и II – II, как указано выше. Плоскости уравновешивания назначаются при проектировании ротора, из условия возможности прикрепления в них добавочных масс или удаления материала ротора. Балансировка проводится последовательно сначала в одной из плоскостей, например в плоскости I - I, а затем во второй. Для того чтобы при определении дисбаланса DI исключить влияние дисбаланса DII, стойки 4, с закрепленными в них подшипниками ротора, нужно установить так, чтобы плоскость уравновешивания II - II проходила через ось качания маятниковой рамы. Тогда дисбаланс DII не дает момента относительно этой оси и не влияет на амплитуду вынужденных колебаний рамы, вызываемых моментом дисбаланса DI. Зависимость амплитуды колебаний маятниковой рамы от величины дисбаланса показана на рис. 5.

Рис. 5
При относительно небольших дисбалансах можно считать, что амплитуда колебаний пропорциональна дисбалансу (участок ОM на рис.5).

где Z - амплитуда, К - коэффициент пропорциональности (6.1)
Для определения дисбаланса D1 приводим ротор во вращение и отсоединяем от него разгонное устройство, предоставляя ротору возможность свободного выбега. Под действием момента дисбаланса D1 относительно жесткой опоры 2 (рис.4)

маятниковая рама получает вынужденные колебания, амплитуда которых пропорциональна дисбалансу D1. Так как частота вращения ротора при выбеге постепенно уменьшается, за счет моментов сил трения в подшипниках, то в некоторый момент времени она становиться равной частоте собственных колебаний системы маятниковая рама – ротор и возникает явление резонанса.
Амплитуда колебания в момент резонанса, даже при небольших дисбалансах, становиться заметной и замеряется при помощи индикатора или какого-либо другого измерительного устройства 5 (рис.4). На рис.6 показано изменение амплитуды колебания маятниковой рамы за время выбега.

Рис. 6
Величина дисбаланса D1 будет

Так как коэффициент пропорциональности «К» зависит от балансируемого ротора, его положения на маятниковой раме, жесткости упругой опоры, то при балансировке каждого нового ротора его приходится определять.
|
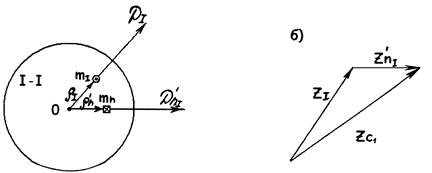
Рис. 7
Для определения значения «К» и углового положения дисбаланса в плоскости I-I приходится проводить два дополнительных пуска называемых пробными. Перед проведением первого пробного пуска прикрепляем к ротору в произвольном месте плоскости уравновешивания I-I на расстоянии  от оси вращения пробную массу mп. Дисбаланс, дополнительно вносимый этой массой в ротор (рис.7,а) будет
от оси вращения пробную массу mп. Дисбаланс, дополнительно вносимый этой массой в ротор (рис.7,а) будет

Амплитуда колебаний рамы, полученная при проведении этого пуска, будет равна геометрической сумме амплитуд, вызываемых дисбалансами  и
и  (рис.7,б).
(рис.7,б).
 (6.5)
(6.5)
Так как угловое положение дисбаланса D1, условно показанное на рис.7,а, как произведение  , неизвестно, то в записанном уравнении три неизвестных и, следовательно, построение треугольника амплитуд (рис.8, б), невозможно.
, неизвестно, то в записанном уравнении три неизвестных и, следовательно, построение треугольника амплитуд (рис.8, б), невозможно.
Перед вторым пуском переставим пробную массу  в противоположное положение так, чтобы
в противоположное положение так, чтобы  (рис.8,а), при этом дисбаланс пробной массы остается неизменным по величине
(рис.8,а), при этом дисбаланс пробной массы остается неизменным по величине  , но меняет направление на 180 градусов. Полученная при втором пробном пуске амплитуда колебаний рамы ZС2 будет (рис.8, б)
, но меняет направление на 180 градусов. Полученная при втором пробном пуске амплитуда колебаний рамы ZС2 будет (рис.8, б)
 (6.6)
(6.6)

Рис. 8
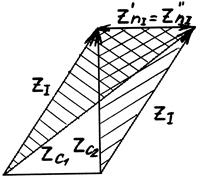
Рис. 9
Если наложить векторные треугольники рис.7,б и рис.8,б, сторонами  так как показано на рис.9, то получим параллелограмм, который может быть построен по стороне Z1 и диагоналям ZС1 и ZС2 (рис.10).
так как показано на рис.9, то получим параллелограмм, который может быть построен по стороне Z1 и диагоналям ZС1 и ZС2 (рис.10).


Рис. 10 Рис. 11
Из параллелограмма (рис.10) определяется амплитуда ZП1, пропорциональная дисбалансу, вносимому в ротор добавлением пробной массы, что позволяет определить коэффициент пропорциональности «К»

и величину дисбаланса ротора в плоскости I-I
Величина дисбаланса корректирующего груза Dk1, необходимая для уравновешивания, численно равна дисбалансу D1 и направлена противоположно ему 

Рис. 12
Для определения углового положения корректирующего груза рассмотрим один из треугольников амплитуд, полученных при пробных пусках, например треугольник  .
.
Из рис.12 видно, что угловое положение дисбаланса ротора D1 в плоскости I-I относительно положения пробной массы  определяется углом φ2. Дисбаланс корректирующей массы Dk1 направлен в противоположную сторону, и его угловое положение относительно пробной массы определяется углом φ1.
определяется углом φ2. Дисбаланс корректирующей массы Dk1 направлен в противоположную сторону, и его угловое положение относительно пробной массы определяется углом φ1.
Так как Dk1=D1=mk1·ρk1, где ρk1 расстояние центра тяжести корректирующей массы от оси вращения ротора, то выбирая величину mk1 определяем
 или, выбирая
или, выбирая  , определяем
, определяем  .
.
Положение корректирующей массы в плоскости I-I показано на рис.13.

Рис. 13
После установки корректирующего груза проводится контрольный пуск и определяется величина остаточного дисбаланса

где Z01 – амплитуда колебания маятниковой рамы, полученная при контрольном пуске.
Величина остаточного дисбаланса  должна быть не более допускаемого значения |D1|
должна быть не более допускаемого значения |D1|

Задачей лабораторной работы является проведение балансировки ротора в одной из плоскостей уравновешивания, при этом ротор установлен на станке так, что вторая плоскость уравновешивания проходят через ось качания маятниковой рамы 1 (рис.4).