Разомкнутая система управления. Схема питания якоря электродвигателя постоянного тока с независимым возбуждением от УВ (система УВ – ДПТ) показана на рис. 2.2, а, где Rз.с – потенциометр, Uп – постоянное напряжение на входе Rз.с, Uз.с – напряжение задания угловой скорости, Uу – входной сигнал управления УВ, Uу.в – напряжение на выходе УВ, Еу.в – электродвижущая сила УВ, Iя – ток якоря электродвигателя,  – угловая скорость электродвигателя, Мс – момент сопротивления на валу электродвигателя.
– угловая скорость электродвигателя, Мс – момент сопротивления на валу электродвигателя.
Рассмотрим установившийся режим работы, когда скорость электродвигателя не изменяется во времени.
ЭДС УВ Еу.в пропорциональна входному сигналу Uз.с, являющемуся выходным сигналом потенциометра Rз.с:
Еу.в = kу.в Uз.с,
где kу.в – коэффициент усиления УВ.
Уравнение механической характеристики ДПТ НВ при питании от УВ:
 , (2.1)
, (2.1)
где  – угловая скорость электродвигателя; kдв – коэффициент передачи ДПТ НВ по Еу.в; Мс – момент сопротивления электродвигателя; kм – коэффициент передачи ДПТ НВ по Мс;
– угловая скорость электродвигателя; kдв – коэффициент передачи ДПТ НВ по Еу.в; Мс – момент сопротивления электродвигателя; kм – коэффициент передачи ДПТ НВ по Мс;  – угловая скорость идеального холостого хода двигателя в разомкнутой системе;
– угловая скорость идеального холостого хода двигателя в разомкнутой системе;  – отклонение угловой скорости двигателя относительно угловой скорости идеального холостого хода в разомкнутой системе.
– отклонение угловой скорости двигателя относительно угловой скорости идеального холостого хода в разомкнутой системе.
Из выражения (2.1) видно, что при изменении Еу.в пропорционально изменяется угловая скорость идеального холостого хода  . Так как ЭДС УВ Еу.в пропорциональна входному сигналу Uз.с, то, изменяя напряжение задания скорости Uз.с, можно плавно регулировать угловую скорость электродвигателя. Заданное значение угловой скорости в этом случае устанавливается перемещением движка потенциометра Rз.с.
. Так как ЭДС УВ Еу.в пропорциональна входному сигналу Uз.с, то, изменяя напряжение задания скорости Uз.с, можно плавно регулировать угловую скорость электродвигателя. Заданное значение угловой скорости в этом случае устанавливается перемещением движка потенциометра Rз.с.
В рассматриваемой системе объектом управления ОУ является ДПТ НВ, регулируемой величиной xр – угловая скорость электродвигателя , управляющим воздействием u, поступающим на вход объекта управления, – ЭДС УВ Еу.в, возмущающим воздействием f – момент сопротивления Мс на валу электродвигателя, задающим воздействием g – напряжение задания скорости Uз.с. Потенциометр Rз.с является задающим устройством ЗУ. Управляемый выпрямитель УВ выполняет одновременно функции усилительно-преобразовательного устройства УПУ и исполнительного устройства ИсУ.
На рис. 2.2, б приведена функциональная схема разомкнутой системы УВ – ДПТ с указанием входных и выходных величин.
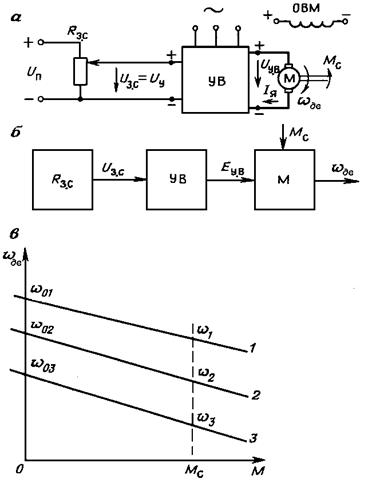
Рис. 2.2. Разомкнутая система управления УВ – ДПТ
При регулировании угловой скорости механические характеристики разомкнутой системы УВ – ДПТ 1 – 3 (рис. 2.2, в), оставаясь линейными и параллельными, имеют значительный наклон. Очевидно, рост возмущающего воздействия – сопротивления Мс на валу электродвигателя – будет приводить к значительному уменьшению угловой скорости по сравнению с заданной скоростью идеального холостого хода. Следствием этого является снижение производительности, уменьшение диапазона и точности регулирования угловой скорости.
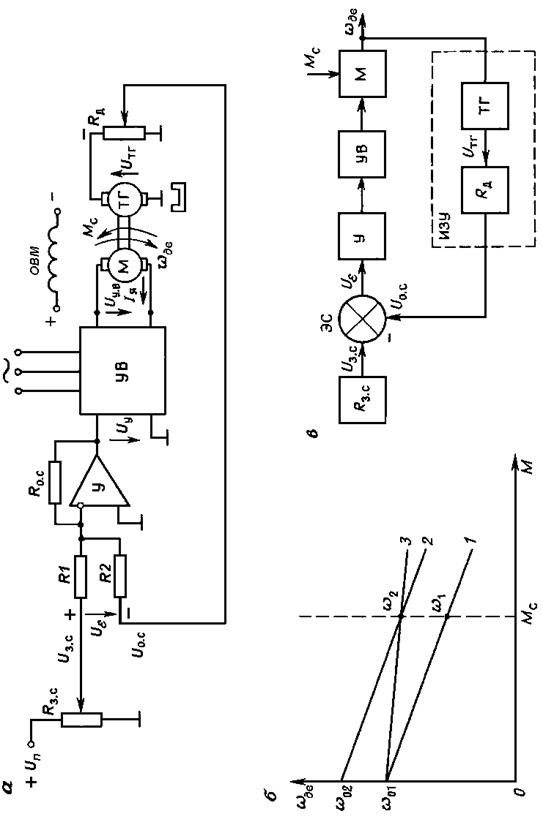
Замкнутая система управления. Поставим цель управления – поддержание с достаточной точностью постоянного значения скорости электродвигателя независимо от момента сопротивления.
Установим на валу электродвигателя измерительное устройство – тахогенератор ТГ (рис. 2.3, а). Последний представляет собой специальный электрический генератор постоянного тока небольшой мощности с возбуждением от постоянных магнитов. Так как ротор тахогенератора приводится во вращение от вала электродвигателя М, то выходное напряжение тахогенератора Uтг пропорционально угловой скорости электродвигателя:
 ,
,
где kтг – коэффициент передачи тахогенератора.
Напряжение обратной связи по угловой скорости
 , (2.2)
, (2.2)
где kд.н – коэффициент передачи делителя напряжения Rд; kо.с = kд.нkтг – коэффициент обратной связи по скорости.
В случае отрицательной обратной связи по регулируемой величине – угловой скорости электродвигателя – управляющее устройство должно иметь элемент сравнения ЭС, который вычитает из сигнала задания скорости Uз.с сигнал обратной связи по скорости Uо.с (рис. 2.3, а). Выходным сигналом ЭС является разность сигналов  :
:
 . (2.3)
. (2.3)
В качестве элемента сравнения в схеме используется операционный усилитель У, включённый по схеме сумматора. В этом случае на инвертирующий вход усилителя необходимо включить два резистора R 1 и R 2. На резистор R 1 подаём напряжение задания скорости Uз.с, а на резистор R 2 – напряжение обратной связи Uо.с со знаком противоположным знаку Uз.с (рис. 2.3, а).

Примем, что входные сопротивления усилителя R 1= R 2= Rвх. В этом случае выходное напряжение усилителя У
 , (2.4)
, (2.4)
где  – коэффициент усиления усилителя.
– коэффициент усиления усилителя.
Наряду с выполнением функции вычитания усилитель У усиливает малый по величине сигнал .
ЭДС УВ равна
 . (2.5)
. (2.5)
Пусть момент сопротивления Мс на валу электродвигателя равен нулю, установившаяся угловая скорость равна  , двигатель работает на механической характеристике 1.
, двигатель работает на механической характеристике 1.
При возрастании нагрузки на валу электродвигателя до значения Мс в разомкнутой системе угловая скорость упала бы до значения  . Однако в системе с отрицательной обратной связью по скорости ее уменьшение в соответствии с выражениями (2.4) и (2.5) приведет к росту сигнала на входе усилителя У и увеличению ЭДС УВ. С увеличением ЭДС УВ скорость электродвигателя также увеличится. Новый установившийся режим будет достигнут на характеристике 2 при скорости
. Однако в системе с отрицательной обратной связью по скорости ее уменьшение в соответствии с выражениями (2.4) и (2.5) приведет к росту сигнала на входе усилителя У и увеличению ЭДС УВ. С увеличением ЭДС УВ скорость электродвигателя также увеличится. Новый установившийся режим будет достигнут на характеристике 2 при скорости  .
.
Таким образом, отрицательная обратная связь по скорости позволяет осуществлять автоматическое регулирование ЭДС УВ, за счет чего отклонение скорости от заданного значения получается значительно меньше, чем в разомкнутой системе. В разомкнутой системе при изменении момента сопротивления ЭДС УВ постоянна, в результате чего отклонение скорости от заданного значения оказывается больше.
Сравним между собой отклонения скорости от заданного значения в разомкнутой и замкнутой системах.
Подставим выражение для ЭДС УВ (2.5) в уравнение (2.1). После преобразований получим уравнение механической характеристики электропривода с отрицательной обратной связью по угловой скорости
 , (2.6)
, (2.6)
где  – общий коэффициент усиления разомкнутой системы;
– общий коэффициент усиления разомкнутой системы;  – угловая скорость идеального холостого хода в замкнутой системе регулирования;
– угловая скорость идеального холостого хода в замкнутой системе регулирования;
 – отклонение скорости электродвигателя относительно скорости идеального холостого хода в замкнутой системе.
– отклонение скорости электродвигателя относительно скорости идеального холостого хода в замкнутой системе.
Пусть скорость идеального холостого хода в разомкнутой системе  равна скорости идеального холостого хода в замкнутой системе .
равна скорости идеального холостого хода в замкнутой системе .
Так как
;  ,
,
то, сравнивая данные выражения, получаем
 . (2.7)
. (2.7)
Так как  , то всегда
, то всегда  . Следовательно, введение отрицательной обратной связи по регулируемой величине – угловой скорости электродвигателя – приводит к уменьшению отклонения скорости от заданного значения по сравнению с разомкнутой системой при изменении внешнего воздействия – момента сопротивления на валу электродвигателя.
. Следовательно, введение отрицательной обратной связи по регулируемой величине – угловой скорости электродвигателя – приводит к уменьшению отклонения скорости от заданного значения по сравнению с разомкнутой системой при изменении внешнего воздействия – момента сопротивления на валу электродвигателя.
Механическая характеристика замкнутой системы представляет собой прямую 3 (см. рис. 2.3, б), наклон которой значительно меньше, чем наклон характеристик 1 и 2 разомкнутой системы.
Отклонение  представляет собой ошибку регулирования в замкнутой системе при действии возмущающего воздействия Мс в установившемся режиме работы.
представляет собой ошибку регулирования в замкнутой системе при действии возмущающего воздействия Мс в установившемся режиме работы.
На рис. 2.3, в приведена функциональная схема замкнутой системы УВ – Д. По сравнению с функциональной схемой разомкнутой системы УВ – Д здесь добавлено три новых блока: усилитель У, измерительное устройство ИзУ, в состав которого входят тахогенератор ТГ и делитель напряжения Rд, а также элемент сравнения ЭС, функции которого выполняет усилитель У, на вход которого подается разность напряжений Uз.с и Uо.с.