Процесс управления в автоматических системах складывается из двух частей: переходного (динамического) процесса и установившегося (статического) режима работы.
В замкнутой автоматической системе, за счет отрицательной обратной связи по регулируемой величине, протекание переходных процессов коренным образом отличается от переходных процессов в разомкнутой системе.
Устойчивость. Важнейшей характеристикой работоспособности САУ является ее устойчивость. Система, не обладающая устойчивостью, является неработоспособной. Она может привести управляемый объект в аварийное состояние.
При изменении сигнала задания или возникновении возмущающего воздействия в автоматической системе нарушается установившийся режим и возникает переходный процесс.
Если с течением времени регулируемая величина стремится к заданному значению, то автоматическая система является устойчивой.
Если с течением времени регулируемая величина всё больше отклоняется от заданного значения или совершает колебания с возрастающей амплитудой, то система автоматического управления является неустойчивой.

Рис. 2.4. Переходные процессы в устойчивой (а) и неустойчивой (б) системах
На рис. 2.4 показан примерный вид переходных процессов в устойчивой (рис. 2.4, а) и неустойчивой (рис. 2.4, б) системах в случае ступенчатого приложения внешнего возмущения f в момент времени t 1.
Качество переходных процессов. Устойчивость необходимое, но не достаточное условие нормальной работы автоматических систем. В устойчивой системе переходные процессы, вызываемые внешними воздействиями, могут протекать различным образом. При исследовании САУ необходимо знать какой будет характер переходных процессов, протекающих в системе. От их вида существенно зависит работоспособность САУ.
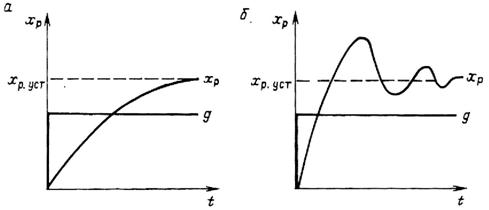
Рис. 2.5. Неколебательные (а) и колебательные (б) переходные процессы
Все переходные процессы в автоматических системах можно разделить на две большие группы: неколебательные и колебательные. Их примерный вид при ступенчатом сигнале задания g(t) показан соответственно на рис. 2.5, а, б. Обычно сколь-нибудь значительные колебания не допускаются. Например, большие колебания тока и скорости электродвигателя могут привести к большим динамическим нагрузкам в механизме и, как следствие, его поломке. В то же время неколебательные процессы могут протекать во времени значительно дольше, чем колебательные. Как правило, это вызывает снижение производительности механизмов, где переходные процессы занимают место, соизмеримое со временем основных рабочих операций. Поэтому одно из основных требований, предъявляемых к САУ, – это обеспечение необходимого качества переходных процессов.
Точность системы управления. Кроме устойчивости и качества переходных процессов для работоспособности автоматических систем большое значение имеет отклонение регулируемой величины xр от заданного значения g:
 .
.
Чем меньше это отклонение при изменении управляющего и возмущающего воздействий, тем меньше ошибка регулирования, точнее система управления.
Рассмотрим установившийся режим работы.
САУ, в которой регулируемая величина xр в установившемся режиме зависит от величины возмущающего воздействия f, называется статической, а отклонение регулируемой величины от заданной – статической ошибкой.
САУ, в которой установившееся значение регулируемой величины xр уст постоянно и не зависит от величины возмущающего воздействия, называется астатической. В этом случае ошибка регулирования в установившемся режиме равна нулю независимо от значения f.
Рассмотренная САР скорости электродвигателя (рис. 2.3) относится к классу статических систем по возмущающему воздействию.
В статических системах с увеличением общего коэффициента усиления разомкнутой системы kо.у статическая ошибка уменьшается. Однако при значительном увеличении kо.у САР становится неработоспособной (неустойчивой). В статических системах статическую ошибку нельзя сделать равной нулю.
Систему стабилизации скорости электродвигателя можно сделать астатической, если в схеме на рис. 2.3, а резистор Rос в цепи обратной связи операционного усилителя У заменить на конденсатор Сос. В этом случае операционный усилитель является интегратором, который интегрирует входной сигнал  . Установившийся режим в системе наступит тогда, когда сигнал на выходе интегратора перестанет изменяться. В этом случае сигнал на входе усилителя У станет равным нулю, т.е.
. Установившийся режим в системе наступит тогда, когда сигнал на выходе интегратора перестанет изменяться. В этом случае сигнал на входе усилителя У станет равным нулю, т.е.  . Следовательно, регулируемая величина в установившемся режиме точно воспроизводит сигнал задания и статическая ошибка по возмущающему воздействию равна нулю.
. Следовательно, регулируемая величина в установившемся режиме точно воспроизводит сигнал задания и статическая ошибка по возмущающему воздействию равна нулю.
Итак, с точки зрения протекания процесса управления, основными требованиями к САУ являются: устойчивость, качество переходного процесса, точность.