Интеллект – это мыслительные способности человека. Отдельные интеллектуальные способности человека могут быть воспроизведены в технических средствах (в том числе и в автоматах) путем создания систем искусственного интеллекта.
Искусственный интеллект (ИИ) – это свойство автоматических и автоматизированных систем брать на себя отдельные функции человеческого интеллекта, т. е. выбирать и принимать оптимальные решения на основе ранее полученного опыта и рационального анализа внешних условий (воздействий). Пример системы искусственного интеллекта (СИИ) представлен на рис. 9.2.

Основные направления в области ИИ:
1. Символьное (семиотическое, нисходящее), основанное на моделировании высокоуровневых процессов мышления человека, на представлении и использовании знаний.
2. Нейрокибернетическое (нейросетевое, восходящее), основанное на моделировании отдельных низкоуровневых структур мозга (нейронов).
Следовательно, сверхзадачей ИИ является построение компьютерной интеллектуальной системы, которая обладала бы уровнем эффективности решений неформализированных задач, сравнимых с человеческим или превосходящим его. В качестве критерия и конструктивного определения интеллектуальности был предложен мысленный эксперимент, известный как тест Тьюринга.
Наибольшее развитие получили системы искусственного интеллекта, построенные на базе средств вычислительной техники и предназначенные для восприятия, обработки и хранения информации, а также формирования решений по целесообразному поведению в различных ситуациях, воспроизводящих (модулирующих) состояние некоторой среды (мира, природы, общества, производства и т.п.).
|
|
Основные направления развития систем искусственного интеллекта
Развилось пять взаимосвязанных областей: естественные языки, робототехника, системы ощущений (системы зрения и слуха), экспертные системы и нейронные сети:
1. Для работы с естественными языками необходимо создание систем, которые переводят обычные инструкции, транслируемые человеком, в машинный язык.
2. Робототехника в большой степени относится к промышленности, военному делу, космическим исследованиям. Робот – это автомат, имитирующий своим поведением, выполняемыми функциями, а иногда и внешним видом человека. Различают роботов с жестко заданной программой действия, роботов, управляемых человеком-оператором, и роботов с искусственным интеллектом.
3. Исследование систем ощущений направлено на создание машин – роботов, которые могут «видеть» и «слышать» и соответственно реагировать:
– компьютерное (машинное) зрение;
– системы речевого ввода и вывода информации (системы распознавания речи, системы синтеза речи и т.д.);
– системы синтеза запахов.
Экспертные системы
Экспертные системы (ЭС) используют логику принятия решений человеком, выполняя функции эксперта при решении задач из некоторой предметной области. Они возникли как значительный практический результат в применении и развитии методов искусственного интеллекта. ЭС выдают советы, проводят анализ, дают консультации, ставят диагноз. Практическое применение ЭС на предприятиях способствует эффективности работы.
Главным достоинством экспертных систем является возможность накопления знаний и сохранение их длительное время. В отличие от человека, к любой информации экспертные системы подходят объективно, что улучшает качество проводимой экспертизы. При решении задач, требующих обработки большого объема знаний, возможность возникновения ошибки при переборе очень мала.
|
|
Экспертная система состоит из базы знаний (части системы, в которой содержатся факты), подсистемы вывода (множества правил, по которым осуществляется решение задачи), подсистемы объяснения, подсистемы приобретения знаний и диалогового процессора. При построении подсистем вывода используют методы решения задач искусственного интеллекта.
ЭС – это набор программ или программное обеспечение, которое выполняет функции эксперта при решении какой-либо задачи в области его компетенции. ЭС, как и эксперт-человек, в процессе своей работы оперирует со знаниями. Знания о предметной области, необходимые для работы ЭС, определенным образом формализованы и представлены в памяти ЭВМ в виде базы знаний, которая может изменяться и дополняться в процессе развития системы. Они ориентированы на решение задач, обычно требующих проведения экспертизы человеком-специалистом. В отличие от машинных программ, использующих процедурный анализ, ЭС решают задачи в узкой предметной области (конкретной области экспертизы) на основе дедуктивных рассуждений. Такие системы часто оказываются способными найти решение задач, которые неструктурированны и плохо определены. Они справляются с отсутствием структурированности путем привлечения эвристик, т. е. правил, взятых «с потолка», что может быть полезным в тех системах, когда недостаток необходимых знаний или времени исключает возможность проведения полного анализа. Главное достоинство ЭС – возможность накапливать знания, сохранять их длительное время, обновлять и тем самым обеспечивать относительную независимость конкретной организации от наличия в ней квалифицированных специалистов. Накопление знаний позволяет повышать квалификацию специалистов, работающих на предприятии, используя наилучшие, проверенные решения. Практическое применение искусственного интеллекта на машиностроительных предприятиях и в экономике основано на ЭС, позволяющих повысить качество и сократить время принятия решений, а также способствующих росту эффективности работы и повышению квалификации специалистов.
|
|
Основным отличием ЭС от других программных продуктов являются использование не только данных, но и знаний, а также специального механизма вывода решений и новых знаний на основе имеющихся. Знания в ЭС представляются в такой форме, которая может быть легко обработана на ЭВМ. В ЭС известен алгоритм обработки знаний, а не алгоритм решения задачи. Поэтому применение алгоритма обработки знаний может привести к получению такого результата при решении конкретной задачи, который не был предусмотрен. Более того, алгоритм обработки знаний заранее не известен и строится по ходу решения задачи на основании эвристических правил. Решение задачи в ЭС сопровождается понятными пользователю объяснениями, качество получаемых решений обычно не хуже, а иногда и лучше достигаемого специалистами. В системах, основанных на знаниях, правила (или эвристики), по которым решаются проблемы в конкретной предметной области, хранятся в базе знаний. Проблемы ставятся перед системой в виде совокупности фактов, описывающих некоторую ситуацию, и система с помощью базы знаний пытается вывести заключение из этих фактов (рис. 9.3).

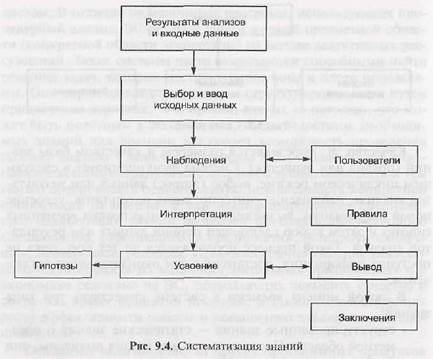
Качество ЭС определяется размером и качеством базы знаний (правил или эвристик). Система функционирует в следующем циклическом режиме: выбор (запрос) данных или результатов анализа, наблюдения, интерпретация результатов, усвоение новой информации, выдвижение с помощью правил временных гипотез и затем выбор следующей порции данных или результатов анализа. Такой процесс продолжается до тех пор, пока не поступит информация, достаточная для окончательного заключения.
В любой момент времени в системе существует три типа знаний:
– структурированные знания – статические знания о предметной области. После того как эти знания выявлены, они уже не изменяются;
– структурированные динамические знания – изменяемые знания о предметной области. Они обновляются по мере выявления новой информации;
– рабочие знания – знания, применяемые для решения конкретной задачи или проведения консультации.
Все перечисленные выше знания хранятся в базе знаний. Для ее построения требуется провести опрос специалистов, являющихся экспертами в конкретной предметной области, а затем систематизировать, организовать и снабдить эти знания указателями, чтобы впоследствии их можно было легко извлечь из базы знаний (рис. 9.4).
Области применения систем, основанных на знаниях, могут быть сгруппированы в несколько основных классов:
1. Медицинская диагностика. Диагностические системы используются для установления связи между нарушениями деятельности организма и их возможными причинами. Наиболее известна диагностическая система MYCIN, которая предназначена для диагностики и наблюдения за состоянием больного при менингите и бактериальных инфекциях. Ее первая версия была разработана в Стенфордском университете в середине 1970-х годов. В настоящее время эта система ставит диагноз на уровне врача-специалиста. Она имеет расширенную базу знаний, благодаря чему может применяться и в других областях медицины.
2. Прогнозирование. Прогнозирующие системы предсказывают возможные результаты или события на основе данных о текущем состоянии объекта. Программная система «Завоевание Уолл-стрит» может проанализировать конъюнктуру рынка и с помощью статистических методов алгоритмов разработать для вас план капиталовложений в перспективе. Она не относится к числу систем, основанных на знаниях, поскольку использует процедуры и алгоритмы традиционного программирования. Хотя пока еще отсутствуют ЭС, которые способны за счет своей информации о конъюнктуре рынка помочь вам увеличить капитал, прогнозирующие системы уже сегодня могут предсказывать погоду, урожайность и поток пассажиров. Даже на персональном компьютере, установив простую систему, основанную на знаниях, вы можете получить местный прогноз погоды.
3. Планирование. Планирующие системы предназначены для достижения конкретных целей при решении задач с большим числом переменных. Дамасская фирма Tnformat впервые в торговой практике предоставляет в распоряжение покупателей 13 рабочих станций, установленных в холле своего офиса, на которых проводятся бесплатные 15-минутные консультации с целью помочь покупателям выбрать компьютер, в наибольшей степени отвечающий их потребностям и бюджету. Кроме того, компания Boeing применяет ЭС для проектирования космических станций, а также для выявления причин отказов самолетных двигателей и ремонта вертолетов. Экспертная система XCON, созданная фирмой DEC, служит для определения или изменения конфигурации компьютерных систем типа VAX в соответствии с требованиями покупателя. Фирма DEC разрабатывает более мощную систему XSEL, включающую базу знаний системы XCON, с целью оказания помощи покупателям при выборе вычислительных систем с нужной конфигурацией. В отличие от XCON, система XSEL является интерактивной.
4. Интерпретация. Интерпретирующие системы обладают способностью получать определенные заключения на основе результатов наблюдения. Система PROSPECTOR, одна из наиболее известных систем интерпретирующего типа, объединяет знания девяти экспертов. Используя сочетания девяти методов экспертизы, системе удалось обнаружить залежи руды стоимостью миллион долларов, причем наличие этих залежей не предполагал ни один из девяти экспертов. Другая интерпретирующая система – HASP/SIAP. Она определяет местоположение и типы судов в Тихом океане по данным акустических систем слежения.
5. Контроль и управление. Системы, основанные на знаниях, могут применяться в качестве интеллектуальных систем контроля и принимать решения, анализируя данные, поступающие от нескольких источников. Такие системы уже работают на атомных электростанциях, управляют воздушным движением и осуществляют медицинский контроль. Они могут быть также полезны при регулировании финансовой деятельности предприятия и оказывать помощь при выработке решений в критических ситуациях.
6. Диагностика неисправностей в механических и электрических устройствах. В этой сфере системы, основанные на знаниях, незаменимы как при ремонте механических и электрических машин (автомобилей, дизельных локомотивов и т.д.), так и при устранении неисправностей и ошибок в аппаратном и программном обеспечении компьютеров.
7. Обучение. Системы, основанные на знаниях, могут входить составной частью в компьютерные системы обучения. Система получает информацию о деятельности некоторого объекта (например, студента) и анализирует его поведение. База знаний изменяется в соответствии с поведением объекта. Примером этого обучения может служить компьютерная игра, сложность которой увеличивается по мере возрастания степени квалификации играющего. Одной из наиболее интересных обучающих ЭС является разработанная Д. Ленатом система EURISCO, которая использует простые эвристики. Эта система была опробована в игре Т. Тревевеллера, имитирующей боевые действия. Суть игры состоит в том, чтобы определить состав флотилии, способной нанести поражение в условиях неизменяемого множества правил. Система EURISCO включила в состав флотилии небольшие, способные провести быструю атаку корабли и одно очень маленькое скоростное судно и постоянно выигрывала в течение трех лет, несмотря на то, что в стремлении воспрепятствовать этому правила игры меняли каждый год.
Большинство ЭС включают знания, по содержанию которых их можно отнести одновременно к нескольким типам. Например, обучающая система может также обладать знаниями, позволяющими выполнять диагностику и планирование. Она определяет способности обучаемого по основным направлениям курса, а затем с учетом полученных данных составляет учебный план. Управляющая система может применяться для целей контроля, диагностики, прогнозирования и планирования. Система, обеспечивающая сохранность жилища, может следить за окружающей обстановкой, распознавать происходящие события (например, открылось окно), выдавать прогноз (вор-взломщик намеревается проникнуть в дом) и составлять план действий (вызвать полицию).
Системы, основанные на знаниях, имеют определенные преимущества перед человеком-экспертом:
1. У них нет предубеждений.
2. Они не делают поспешных выводов.
3. Эти системы работают систематизирование, рассматривая все детали, часто выбирая наилучшую альтернативу из всех возможных.
4. База знаний может быть очень и очень большой. Будучи введены в машину один раз, знания сохраняются навсегда. Человек же имеет ограниченную базу знаний, и если данные долгое время не используются, то они забываются и навсегда теряются.
5. Системы, основанные на знаниях, устойчивы к «помехам». Эксперт пользуется побочными знаниями и легко поддается влиянию внешних факторов, которые непосредственно не связаны с решаемой задачей. ЭС, не обремененные знаниями из других областей, по своей природе менее подвержены «шумам». Со временем системы, основанные на знаниях, могут рассматриваться пользователями как разновидность тиражирования – новый способ записи и распространения знаний. Подобно другим видам компьютерных программ, они не могут заменить человека в решении задач, а скорее напоминают орудия труда, которые дают ему возможность решать задачи быстрее и эффективнее.
6. Эти системы не заменяют специалиста, а являются инструментом в его руках.
Нейронные сети
Интеллектуальные системы на основе искусственных нейронных сетей позволяют с успехом решать проблемы распознавания образов, выполнения прогнозов, оптимизации, ассоциативной памяти и управления. Искусственные нейросети являются электронными моделями нейронной структуры мозга, который, главным образом, учится на опыте. Множество проблем, не поддающихся решению традиционными компьютерными методами, могут быть эффективно решены с помощью нейросетей.
Искусственные нейронные сети (ИНС) – математические модели, а также их программные или аппаратные реализации, построенные по принципу организации и функционирования биологических нейронных сетей – сетей нервных клеток живого организма. Это понятие возникло при изучении процессов, протекающих в мозге, и при попытке смоделировать эти процессы. Первой такой попыткой были нейронные сети Маккалока и Питтса. Впоследствии, после разработки алгоритмов обучения, получаемые модели стали использовать в практических целях: в задачах прогнозирования, для распознавания образов, в задачах управления и др.
ИНС представляют собой систему соединенных и взаимодействующих между собой простых процессоров (искусственных нейронов). Такие процессоры обычно довольно просты, особенно в сравнении с процессорами, используемыми в персональных компьютерах. Каждый процессор подобной сети имеет дело только с сигналами, которые он периодически получает, и сигналами, которые он периодически посылает другим процессорам. И тем не менее, будучи соединенными в достаточно большую сеть с управляемым взаимодействием, такие локально простые процессоры вместе способны выполнять довольно сложные задачи.
С точки зрения машинного обучения нейронная сеть представляет собой частный случай методов распознавания образов, дискриминантного анализа, методов кластеризации и т.п. С математической точки зрения обучение нейронных сетей – это многопараметрическая задача нелинейной оптимизации. С точки зрения кибернетики нейронная сеть используется в задачах адаптивного управления и как алгоритмы для робототехники. С точки зрения развития вычислительной техники и программирования нейронная сеть – способ решения проблемы эффективного параллелизма. А с точки зрения искусственного интеллекта ИНС является основой философского течения коннективизма и основным направлением в структурном подходе по изучению возможности построения (моделирования) естественного интеллекта с помощью компьютерных алгоритмов. Известные применения:
– распознавание образов и классификация. В качестве образов могут выступать различные по своей природе объекты: символы текста, изображения, образцы звуков и т.д. При обучении сети предлагаются различные образцы образов с указанием того, к какому классу они относятся. Образец, как правило, представляется как вектор значений признаков. При этом совокупность всех признаков должна однозначно определять класс, к которому относится образец. В случае если признаков недостаточно, сеть может соотнести один и тот же образец с несколькими классами, что неверно. По окончании обучения сети ей можно предъявлять неизвестные ранее образы и получать ответ об их принадлежности к определенному классу;
– принятие решений и управление. Эта задача близка к задаче классификации. Классификации подлежат ситуации, характеристики которых поступают на вход нейронной сети. На выходе сети при этом должен появиться признак решения, которое она приняла. При этом в качестве входных сигналов используются различные критерии описания состояния управляемой системы;
– прогнозирование. Способности нейронной сети к прогнозированию напрямую следуют из ее способности к обобщению и выделению скрытых зависимостей между входными и выходными данными. После обучения сеть способна предсказать будущее значение некой последовательности на основе нескольких предыдущих значений и/или каких-то существующих в настоящий момент факторов. Следует отметить, что прогнозирование возможно только тогда, когда предыдущие изменения действительно в какой-то степени предопределяют будущие. Например, прогнозирование котировок акций на основе котировок за прошлую неделю может оказаться успешным (а может и не оказаться), тогда как прогнозирование результатов завтрашней лотереи на основе данных за последние 50 лет почти наверняка не даст никаких результатов;
– аппроксимация. Нейронные сети могут аппроксимировать непрерывные функции. Доказана обобщенная аппроксимационная теорема: с помощью линейных операций и каскадного соединения можно из произвольного нелинейного элемента получить устройство, вычисляющее любую непрерывную функцию с некоторой наперед заданной точностью. Это означает, что нелинейная характеристика нейрона может быть произвольной: от сигмоидальной до произвольного волнового пакета или вейвлета, синуса или многочлена. От выбора нелинейной функции может зависеть сложность конкретной сети, но с любой нелинейностью сеть остается универсальным аппроксиматором и при правильном выборе структуры может достаточно точно аппроксимировать функционирование любого непрерывного автомата;
– сжатие данных и ассоциативная память. Способность нейросетей к выявлению взаимосвязей между различными параметрами дает возможность выразить данные большой размерности более компактно, если данные тесно взаимосвязаны друг с другом. Обратный процесс – восстановление исходного набора данных из части информации – называется (авто)ассоциативной памятью. Ассоциативная память позволяет также восстанавливать исходный сигнал/образ из зашумленных/поврежденных входных данных. Решение задачи гетероассоциативной памяти позволяет реализовать память, адресуемую по содержимому. Нейронные сети не программируются в привычном смысле этого слова, они обучаются. Возможность обучения – одно из главных преимуществ нейронных сетей перед традиционными алгоритмами. Технически обучение заключается в нахождении коэффициентов связей между нейронами. В процессе обучения нейронная сеть способна выявлять сложные зависимости между входными данными и выходными, а также выполнять обобщение. Это значит, что в случае успешного обучения сеть сможет вернуть верный результат на основании данных, которые отсутствовали в обучающей выборке, а также неполных и/или «зашумленных», частично искаженных данных.
Робототехника
Робототехника – это прикладная наука, занимающаяся разработкой автоматизированных технических систем. Робототехника опирается на такие дисциплины, как электроника, механика, программное обеспечение. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику. Название науки произошло от слова «робот», придуманного в 1920 г. научным фантастом и нобелевским лауреатом К. Чапеком.
Робототехнические комплексы так же популярны в области образования, как современные высокотехнологичные исследовательские инструменты в области теории автоматического управления и мехатроники. Их использование в различных учебных заведениях среднего и высшего профессионального образования позволяет реализовывать концепцию «обучение на проектах», положенную в основу такой крупной совместной образовательной программы США и Европейского союза, как ILERT. Применение возможностей робототехкических комплексов в инженерном образовании дает возможность одновременной отработки профессиональных навыков сразу по нескольким смежным дисциплинам: механике, теории управления, схемотехнике, программированию, теории информации.
Робот (чеш. Robot) – автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях или при относительной недоступности объекта (рис. 9.5).

Робот может управляться оператором либо работать по заранее составленной программе. Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при рутинной работе, при работе с тяжелыми грузами, вредными материалами, а также в других трудных или небезопасных для человека условиях. Человекоподобный робот (после его создания) станет первым универсальным инструментом, так как сможет пользоваться широчайшим набором любых технических средств, уже сделанных человеком для себя.
Одним из основных компонентов робота является привод – совокупность устройств, предназначенных для приведения в действие машин. Состоит из двигателя, трансмиссии и системы управления. Различают привод групповой (для нескольких машин) и индивидуальный.
В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух:
– двигатели постоянного тока. В настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов;
– шаговые электродвигатели. Как можно догадаться из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определенный угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как контроллеру точно известно, какой был сделан поворот. В связи с этим они часто используются в приводах многих роботов и станках с ЧПУ;
– пьезодвигатели. Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы совершенно уникален: крошечные пьезоэлектрические ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах;
– воздушные мышцы. Воздушные мышцы – простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных;
– электроактивные полимеры. Электроактивные полимеры – это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Однако в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все они неэффективны или непрочны;
– эластичные нанотрубки. Это многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет этому волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменен проводом из такого материала диаметром 8 мм. Такие компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.
По типу управления роботехнические системы подразделяются на:
1. Биотехнические:
– командные (кнопочное и рычажное управление отдельными звеньями робота);
– копирующие (повтор движения человека; возможна реализация обратной связи, передающей прилагаемое усилие; экзоскелеты);
– полуавтоматические (управление одним командным органом, например рукояткой, всей кинематической схемой робота).
2. Автоматические:
– программные (функционируют по заранее заданной программе, в основном предназначены для решения однообразных задач в неизменных условиях окружения);
– адаптивные (решают типовые задачи, но адаптируются под условия функционирования);
– интеллектуальные (наиболее развитые автоматические системы).
3. Интерактивные:
– автоматизированные (возможно чередование автоматических и биотехнических режимов);
– суттервизорные (автоматические системы, в которых человек выполняет только целеуказательные функции);
– диалоговые (робот участвует в диалоге с человеком по выбору стратегии поведения, при этом, как правило, робот оснащается экспертной системой, способной прогнозировать результаты манипуляций и дающей советы по выбору цели).
Беспилотный летательный аппарат – разновидность летательного аппарата, управление которым не осуществляется пилотом на борту.
Различают следующие беспилотные летательные аппараты (рис. 9.6):
– беспилотные неуправляемые;
– беспилотные автоматические;
– беспилотные дистанционно пилотируемые.
