Расчет демонстрируется на примере механизма по рис. 11.3, а.
Расчёт перемещений (рис. 11.4, а).
В исходном положении тяга 2 расположена под углом αн к вертикали. Максимально возможный ход начального звена – ползуна с шарниром А:
 . (11.6)
. (11.6)
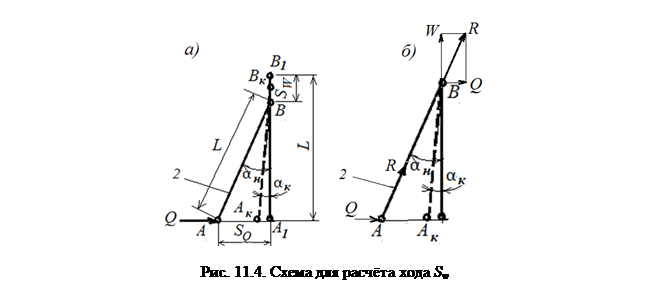 При достижении точки А1 тяга занимает вертикальное положение, а её верхний шарнир (конечное звено механизма) завершает ход вверх. Sw = ВВ1. Шарнир А не должен двигаться вправо дальше точки А1, т.к. начнётся опускание верхнего шарнира В. Это равносильно раскреплению заготовки. Чтобы не допустить этого, ход ползуна с шарниром А ограничивают некоторой точкой Ак., гарантирующей от несанкционированного раскрепления заготовки.
При достижении точки А1 тяга занимает вертикальное положение, а её верхний шарнир (конечное звено механизма) завершает ход вверх. Sw = ВВ1. Шарнир А не должен двигаться вправо дальше точки А1, т.к. начнётся опускание верхнего шарнира В. Это равносильно раскреплению заготовки. Чтобы не допустить этого, ход ползуна с шарниром А ограничивают некоторой точкой Ак., гарантирующей от несанкционированного раскрепления заготовки.
При выбранных L и αн максимально возможный ход шарнира В равен:
 . (11.7)
. (11.7)
Чтобы избежать «мнимого» закрепления самой маленькой по высоте заготовки в партии нижний шарнир механизма должен в момент закрепления остановиться в точке Аk. Рассчитанный для этого случая ход механизма равен:
 (11.8)
(11.8)
Расчёт действующих сил (рис. 11.4, б).
Исходная сила Q от шарнира А передается к шарниру В вдоль тяги 2 в виде силы R, координатными составляющими которой являются силы Q и W:
 . (11.9)
. (11.9)
Для идеального механизма без трения соотношение сил Q и W (из геометрического построения) определяется равенством:
 , (11.10)
, (11.10)
где угол αк – угол наклона тяги 2 в закреплённом состоянии заготовки. Равенство (11.10) аналогично полученному для идеального клина (см. ф. (8.7)). На основании этой аналогии, для расчёта сил у рычажно-шарнирного механизма с трением используют расчётную формулу, полученную для определения силы закрепления Wв клиновом механизме с трением:
 , (11.11)
, (11.11)
В формуле (12.11) обозначены:
- αк – угол наклона тяги к вертикали в закреплённом состоянии механизма;
- β – угол трения в шарнирах:
 , (11.12)
, (11.12)
где dш – диаметр оси шарнира, L – длина тяги (расстояние между шарнирами); -  - коэффициент трения в контакте ползуна с направляющей; если вместо ползуна применён ролик (см. рис. 11.3, в), то вместо подставляют приведенный коэффициент трения для ролика, вычисляемый по формуле (подробнее см. в разделе «Клиноплунжерные механизмы»):
- коэффициент трения в контакте ползуна с направляющей; если вместо ползуна применён ролик (см. рис. 11.3, в), то вместо подставляют приведенный коэффициент трения для ролика, вычисляемый по формуле (подробнее см. в разделе «Клиноплунжерные механизмы»):
 . (11.13)
. (11.13)
здесь dр – диаметр оси ролика, Dр – наружный диаметр ролика.
После нахождения силы W развиваемой механизмом в шарнире В переходят к расчёту силы W1 закрепления заготовки на другом плече рычага 3,используя формулу (11.5).
При известном значении необходимого усилия закрепления
 (11.14)
(11.14)
В том случае, когда сила W в шарнире В передаётся консольному плунжеру (см. рис. 11.3, б), сила закрепления заготовки W1 уменьшится с учётом потерь на трение в направляющих консольного плунжера (см. «Клиноплунжерный механизм с консольным плунжером), и формула (11.11) преобразуется к виду:
 . (11.15)
. (11.15)
где: 
В тех случаях, когда в конструкции механизма вместо ползуна применён ролик, в формулах (11.11) и (11.15) вместо обычного коэффициента трения tgφ1нужно использовать приведенный коэффициент трения, учитывающий уменьшенное трение в контакте ролика с его направляющей:
 (11.16)
(11.16)
Расчёт двухрычажного механизма одностороннего действия.
Расчёт перемещений.
Пример механизма показан на рис. 11.3, г. При движении шарнира А в горизонтальной плоскости нижняя тяга 2, разворачиваясь к вертикальному положению, перемещает шарнир вверх, а верхняя тяга сообщает такое же перемещение шарниру В. Благодаря названным движениям ход шарнира В в вертикальном направлении удваивается:
 (11.17)
(11.17)
Расчёт сил.
Исходная сила Q в шарнире А создаёт две силы R, направленные вдоль тяг (рис. 11.5) и в закреплённом состоянии механизма уравновешена силой Р – геометрической суммой двух сил R1 = R. Результатом действия сил R являются силы W в шарнирах В и С, вдвое меньшие, чем на одно рычажном механизме.В неподвижном шарнире С сила W уравновешивается реакцией N, а в шарнире В передаётся дальше для закрепления заготовки.
 В механизме по рис. 11.3, г у ползуна 1 нет направляющих и нет сил трения, препятствующих его движению. Для расчёта W используют формулу (11.11), преобразованную к виду (tgφ1 = 0):
В механизме по рис. 11.3, г у ползуна 1 нет направляющих и нет сил трения, препятствующих его движению. Для расчёта W используют формулу (11.11), преобразованную к виду (tgφ1 = 0):
 . (11.18)
. (11.18)