Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[1]
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
3. Ток якоря двигателя изменяется в процессе разгона двигателя и без учёта возникновения эдс самоиндукции в обмотке якоря машины в любой момент времени может быть определён по формуле.
где Ud – напряжение на выходе преобразователя; Ra и Rпуск – соответственно активные сопротивления якорных цепей двигателя и пускового реостата, включённого последовательно с якорем машины; Eа – эдс обмотки якоря, определяемая по формуле
гдеСМ и Се – конструктивные коэффициенты двигателя, зависящие от конструкции двигателя (если частота вращения измеряется в рад/с – используется только коэффициент СМ),
Датчики тока предназначены для измерения постоянного или переменного токов.
ЭДС обмотки якоря определяется суммой ЭДС всех секций, образующих одну параллельную ветвь.
4.Пуск - после подачи команды на пуск операции управления сводятся к включению обмоток двигателя на полное напряжение сети, т.е. к прямому пуску двигателя. Асинхронные двигатели с короткозамкнутым ротором и синхронные двигатели большой мощности (больше 100кВт) запускаются при пониженном напряжении.
|
|
При пуске ДПТ и АД с фазным ротором автоматически выключаются ступени пускового реостата из цепи протекания тока якоря или ротора соответственно.
Автоматизация процесса торможения работающего двигателя при любом виде электрического торможения предусматривает выполнение двух основных операций управления: 1 – после подачи команды на торможение совершаются переключения в силовых цепях двигателя, приводящие к изменению направления вращающего момента двигателя, т.е. делающие его тормозным; 2 – в конце торможения при скорости близкой к нулю, двигатель, тормозящийся для остановки, отключается от сети и затормаживается механическим тормозом. В другом случае в главных цепях производятся переключения, необходимые для реверса двигателя, т.е. для разгона в противоположном направлении.
Автоматическое управление осуществляется главным образом с помощью релейно-контакторной аппаратуры. Наиболее просто автоматизировать пуск и торможение асинхронных двигателей с короткозамкнутым ротором. Для ограничения пусковых токов мощных электродвигателей необходимо вводить дополнительные сопротивления в цепи ротора асинхронного двигателя или в цепи якоря двигателя постоянного тока, которые, по мере разгона двигателя, должны постепенно исключаться таким образом, чтобы максимальное и минимальное значение тока или момента находилось в заданных пределах I 1 и I 2рис.18.
|
|

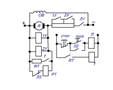
Схема автоматического пуска и торможения в функции скорости

Схема автоматического пуска в функции времени
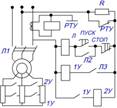
Схема автоматического пуска двигателя в функции тока
6. Современные системы управления электроприводами строятся в виде многоконтурных систем подчиненного регулирования с последовательным включением регуляторов: тока, частоты вращения, положения. При этом задающим сигналом регулятору тока является выходной сигнал регулятора скорости. В свою очередь регулятор скорости получает задание от регулятора положения. Такое построение системы управления позволяет вести раздельное регулирование переменных и раздельную настройку контуров, начиная с внутреннего токового, что упрощает расчет и настройку системы и позволяет получить высокое качество регулирования.
12. Системы импульсно-фазового управления (СИФУ) предназначены для изменения углов а открывания тиристоров в функции входного управляющего сигнала в диапазоне, определяемом типом, условиями работы и параметрами нагрузки. Требования к СИФУ заключаются в обеспечении необходимого диапазона изменения углов а, формировании отпирающих тиристоры импульсов и обеспечении достаточной симметрии углов включения тиристоров в различных фазах. Кроме того, СИФУ должна быть устойчивой к помехам для обеспечения стабильной работы и вместе с тем достаточно быстродействующей для обеспечения заданных динамических режимов.
Одним из наиболее эффективных способов повышения статической и динамической точности систем импульсно-фазового управления (СИФУ) вентильными преобразователями (ВП), а также их помехоустойчивости являются методы интегрирующего развертывающего преобразования.
|
|
13. принципы построения системы защиты от неправильного чередования фаз и обрыва фазы СР (Connecting Protection), приведя в качестве примера схему узла защиты привода «КЕМЕК» (рис. 5.1).
Переменное трёхфазное напряжение поступает от сети к точкам A, B и С. Резисторы Ra, RB и RC образуют симметричную измерительную цепь, и при симметричной питающей сети напряжение в их общей точке равно нулю, так как
 A + B + C = 0. (5.1)
A + B + C = 0. (5.1)
Резистор R1 и конденсатор С1 образуют фазосдвигающую цепь, их величины выбираются таким образом, что напряжение на С1 (UC1) отстаёт от приложенного (UB) на 60° эл. Таким образом, на делитель R2-R3 подаются два противофазных напряжения: UA и UC1 (рис. 5.2).
 Как видно из приведённой векторной диаграммы, напряжение на выходе делителя при соответствующем выборе величин сопротивлений R2 и R3 также равно нулю: R2 С1 + R3 А= 0.
Как видно из приведённой векторной диаграммы, напряжение на выходе делителя при соответствующем выборе величин сопротивлений R2 и R3 также равно нулю: R2 С1 + R3 А= 0.
Диоды D1 и D2 являются однополупериодными выпрямителями и одновременно образуют схему логического элемента ИЛИ. При нарушении условия (5.1), что соответствует несимметричной питающей сети (имитируется в приведённом примере отключение ключа К2), либо (5.2), вызванного неправильным чередованием фаз питающего напряжения (имитируется переключателем К1), на вход компаратора на элементе DD1 поступает выпрямленное положительное напряжение, DD1 переключается и выдаёт сигнал логической единицы «1» о срабатывании защиты СР. Это отображается свечением индикатора «СР».
14. Упрощенная принципиальная схема широтно-импульсного преобразователя (ШИП) представлена на рис 68. Она содержит четыре ключа ТК1 - ТК4. В диагональ моста, образованного силовыми ключами, включена нагрузка.
Нагрузкой является якорь двигателя постоянного тока. Питание ШИП осуществляется от источника постоянного тока, например, неуправляемого выпрямителя.
Наиболее простым способом управления ШИП по цепи якоря является, так называемый, симметричный способ управления.
При этом способе в состоянии одновременного переключения находятся все четыре силовых ключа моста, а напряжение на выходе ШИП представляет собой знакопеременные импульсы, длительность которых регулируется входным сигналом.
14. 
16. рассмотрим и контур регулирования частоты вращения двигателя.

1 квадрат - передаточная функция пропорционально- интегрального регулятора скорости; J – суммарный момент инерции ЭП;
2 - номинальный моментообразующий ток электродвигателя 2 i и сигнал его задании;
C= M/ I2 конструктивная постоянная АД;
19. Адаптивная система – система, автоматически приспосабливающаяся к возникающим условиям при управлении тем или иным технологическим процессом.
Оптимизирующая система управления - системы управления, которые автоматически ищут оптимальную рабочую точку.
Адаптивные системы управления с эталонной моделью - использовали модель поведения идеальной системы для получения сигналов ошибки, обусловленных отличием действительного поведения системы от требуемого; эти сигналы затем служили для модификации параметров управляющего устройства таким образом, чтобы, насколько это возможно, поддерживать идеальное поведение, несмотря на точно неизвестную и изменяющуюся динамику системы.
Самоосциллирующая адаптивная система - тип адаптивных систем управления, работающих по принципу автоматической компенсации изменчивости параметров с помощью автоколебаний в замкнутом контуре управления.
Системы с переменной структурой - Метод основан на инвариантности траектории системы по отношению к значениям ее параметров в случае, когда управляющее воздействие определяется переключающей функцией и реле. Поведение системы при этом характеризуется движением по переключающей поверхности и называется скользящим режимом.

23. Следящие электроприводы или системы управления положением представляют собой замкнутые электроприводы, управляющие перемещением и обеспечивающие стабилизацию положения объекта регулирования относительно некоторой базовой системы координат. При этом регулируемая величина (положение объекта) с той или иной степенью точности должна соответствовать приложенному к системе управляющему воздействию. Следящие электроприводы могут обеспечивать как линейное, так и угловое перемещение регулируемого объекта. Например, это может быть система наведения солнечной батареи, телескопа и др. или система управления подачей резца в станке с программным управлением.
Во многих случаях следящие электроприводы строятся по принципу подчиненного регулирования на основе двигателей постоянного тока, коллекторных или вентильных. Поэтому основное внимание мы уделим именно таким приводам. Функциональная схема привода представлена на рис. 9.1, где обозначено: РП – регулятор положения; РС – регулятор скорости; РТ – регулятор тока; Д – двигатель; ОР – объект регулирования; ДП, ДС, ДТ – датчики соответственно положения, скорости и тока.
 электропривод содержит три контура регулирования: положения, скорости и тока. Внутренние контуры регулирования (скорости и тока) строятся, как это было показано при рассмотрении систем регулирования скорости. Внешний контур содержит датчик положения объекта относительно базовой системы координат. Это может быть датчик углового положения (сельсин, редуктосин, вращающийся трансформатор и др.) или любой датчик линейного перемещения. Сигнал с выхода ДУ сравнивается с управляющим сигналом U 0, определяющим положение объекта. По результату сравнения РП – вырабатывается сигнал U рс регулирования скорости, который, в конечном счете, обеспечивает вращение двигателя и перемещение ОР – на заданный угол или расстояние.
электропривод содержит три контура регулирования: положения, скорости и тока. Внутренние контуры регулирования (скорости и тока) строятся, как это было показано при рассмотрении систем регулирования скорости. Внешний контур содержит датчик положения объекта относительно базовой системы координат. Это может быть датчик углового положения (сельсин, редуктосин, вращающийся трансформатор и др.) или любой датчик линейного перемещения. Сигнал с выхода ДУ сравнивается с управляющим сигналом U 0, определяющим положение объекта. По результату сравнения РП – вырабатывается сигнал U рс регулирования скорости, который, в конечном счете, обеспечивает вращение двигателя и перемещение ОР – на заданный угол или расстояние.
Вопросы:
2.Машина постоянного тока, как звено системы автоматического регулирования, статические и динамические характеристики машины постоянного тока.
3.Датчики тока, ЭДС якоря, частоты вращения, положения, используемые в системах управления электроприводами, их статические и динамические характеристики.
4.Принципы автоматического управления реостатным пуском и торможением электропривода. Узлы пуска, торможения электродвигателей, работающих в функции времени, скорости, тока.
6. Принципы построение многоконтурных систем непрерывного управления электроприводами постоянного тока.
12.Реверсивные тиристорные преобразователи, раздельное и совместное управление выпрямителями.
13.Особенности построения систем защиты электроприводов с непрерывным управлением. Примеры построения элементов систем защиты.
14.Особенности преобразователей с широтно-импульсным регулированием, построение систем управления силовыми ключами.
16.Синтез контура регулирования частоты вращения, обеспечение необходимой точности и устойчивости.
19. Основные понятия адаптивных систем автоматического управления, элементы адаптивных систем управления электроприводами. Типовые узлы адаптивных систем.
23. Системы управления положением, особенности построения систем управления приводов с позиционированием