Состав и назначение элементов обобщенной структурной САУ. Структурная схема принципа прямого управления, достоинства и недостатки принципа. Примеры судовых САУ.
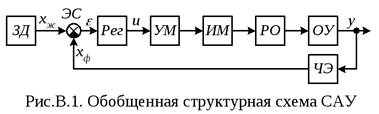
Обобщенная структурная схема САУ.
Система автоматического управления (рис 1.1)  содержит: устройство управления (УУ) или регулятор, на вход которого подается задающее воздействие (входной сигнал или совокупность сигналов) хвх(t). Задающее воздействие определяет требуемый закон управления. В результате этого воздействия на выходе регулятора вырабатывает управляющее воздействие U(t), которое поступает на вход объекта управления (ОУ).
содержит: устройство управления (УУ) или регулятор, на вход которого подается задающее воздействие (входной сигнал или совокупность сигналов) хвх(t). Задающее воздействие определяет требуемый закон управления. В результате этого воздействия на выходе регулятора вырабатывает управляющее воздействие U(t), которое поступает на вход объекта управления (ОУ).
Под ОУ в данном курсе понимается любое техническое устройство (судно, самолет, турбина и т.д.), для функционирования которого необходимы специально организованные воздействия U(t). Качество управления оценивается по значению выходной величины объекта хвых(t) – это обычно главный технологический параметр (скорость, мощность, производительность и т.д.).
Наряду с хвх(t), внешним по отношению к рассматриваемой САУ явяляются возмущающее воздействие хвозм(t), которое, как и U(t), приложено к ОУ. К числу таких возмущений можно отнести момент сопротивления при металлообработке, колебание напряжения в сети, ветровую нагрузку и т.д. Возмущающие воздействия искажают требуемый закон управления. Очевидно, что в первом приближении задача синтеза САУ состоит в разработке такого УУ, с которым и при наличии существенных возмущающих воздействий отклонение требуемого закона управления ОУ от фактического не превышает допустимых значений.
Структурная схема принципа прямого управления, достоинства и недостатки принципа.
Принцип прямого управления САУ с прямым управлением содержит ОУ (на рис. В.2 под объектом управления понимается совокупность УМ+ИМ+РО+ОУ+ЧЭ из элементов рис.В.1) и регулятор.
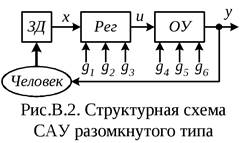
На ОУ и Рег действуют возмущающие сигналы g1,…,g6, изменяющие произвольным образом и которые ведут к непредсказуемым изменениям их выходных сигналов и и у. За выходным сигналом y следит человек-оператор, который вручную изменяет сигнал x так, чтобы достичь заданных значений сигнала y. Сигналы возмущения g1..g6 человеком не контролируются.
Данная САУ называется также САУ разомкнутого типа, чем подчеркивается то обстоятельство, что выходной сигнал у не используется техническими средствами автоматизации УМ, ИМ, РО, ОУ, ЧЭ и Рег в формировании сигнала задания х и управления объектом.
Достоинства: Предельная простота регулятора.
Недостатки: 1. Обязательное присутствие человека- оператора, который является наиболее ненадежным звеном САУ.
2. Малая точность регулирования, особенно в динамике, когда сигналы х,g1,..., g6 быстро изменяются.
3. Невысокое быстродействие, обусловленное медленной реакцией человека на изменения сигнала у.
Примеры судовых САУ:
Электропривод якорно-швартового устройства. Оператор с помощью соответствующих органов управления задаёт одну из фиксированных скоростей вращения двигателя. Сигналами возмущения g1..g6 являются: натяжение якорной цепи, напряжение питания электродвигателя, температура обмоток двигателя и др.