Способы задания движения точки
Задать движение точки означает задать ее положение в каждый момент времени. Положение это должно определяться, как уже отмечалось, в какой-либо системе координат. Однако для этого не обязательно всегда задавать сами координаты; можно использовать величины, так или иначе с ними связанные. Ниже описаны три основных способа задания движения точки.
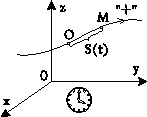 Рис. 1
Рис. 1
|
1. Естественный способ. Этим способом пользуются, если известна траектория движения точки. Траекторией называется совокупность точек пространства, через которые проходит движущаяся материальная частица. Это линия, которую она вычерчивает в пространстве. При естественном способе необходимо задать (рис. 1):
а) траекторию движения (относительно какой-либо системы координат);
б) произвольную точку на ней нуль, от которого отсчитывают расстояние S до движущейся частицы вдоль траектории;
в) положительное направление отсчета S (при смещении точки М в противоположном направлении S отрицательно);
г) начало отсчета времени t;
д) функцию S(t), которая называется законом движения точки.
2. Координатный способ. Это наиболее универсальный и исчерпывающий способ описания движения. Он предполагает задание:
а) системы координат (не обязательно декартовой) q1, q2, q3;
б) начало отсчета времени t;
в) закона движения точки, т.е. функций q1(t), q2(t), q3(t).
3. Векторный способ. Положение точки в пространстве может быть определено также и радиус-вектором, проведенным из некоторого начала в данную точку (рис. 2). В этом случае для описания движения необходимо задать:
а) начало отсчета радиус-вектора r;
б) начало отсчета времени t;
в) закон движения точки r (t).
Поскольку задание одной векторной величины r эквивалентно заданию трех ее проекций x, y, z на оси координат, от векторного способа легко перейти к координатному. Если ввести единичные векторы i, j, k (i = j = k = 1), направленные соответственно вдоль осей x, y и z (рис. 2), то, очевидно, закон движения может быть представлен в виде
r (t) = x(t) i +y(t) j +z(t) k
Преимущество векторной формы записи перед координатной в компактности (вместо трех величин оперируют с одной) и часто в большей наглядности.
Поступательное движение
Поступательным называется такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельной своему начальному направлению.
Поступательное движение не следует смешивать с прямолинейным. При поступательном движении тела траектории его точек могут быть любыми кривыми линиями. Приведем примеры.
Вращение тела вокруг неподвижной оси
Рассмотрим вращение абсолютно твердого тела вокруг неподвижной оси. Под абсолютно твердым телом понимают такое, у которого остаются неизменными расстояния между любыми его точками. Такое тело не может испытывать деформаций. При вращении такого тела вокруг неподвижной оси каждая его точка описывает дугу окружности с центром, лежащим на оси, причем все такие окружности лежат в параллельных плоскостях и все дуги содержат одинаковое число дуговых градусов.
Так как положение неподвижной оси задано, а расстояние между двумя любыми точками остается неизменным, определить положение тела в пространстве можно с помощью всего одного числа. Этим единственыи числом может быть, например, угол φ, на который повернуто тело вокруг оси относительно некоторого своего положения, принятого за нулевое.
При вращении тела вокруг неподвижной оси угол φ меняется с течением времени.
Угловая скорость. Угловая скорость w вращающегося тела – это быстрота изменения угла поворота φ (t) вокруг оси:
w = lim Δ φ / Δ t = dφ /dt
D t ® 0
Обычно угол измеряется в радианах, время – в секундах, угловая скорость – в радианах в секунду.
V = Rw
Видно, что линейная скорость точек тела при вращении, в отличие от угловой скорости, различна и зависит от радиуса окружности.
Угловое ускорение. Если тело вращается равномерно, т.е. с постоянной угловой скоростью w, то каждая точка тела движется также с постоянной по величине линейной скоростью по окружности своего радиуса. Если вращение неравномерное, т.е. угловая скорость меняется со временем (увеличивается или уменьшается), то вводят величину, характеризующую быстроту ее изменения – угловое ускорение:
b = lim Δ w / Δ t = dw /dt
D t ® 0
Если Δ w > 0, то угловая скорость возрастает, угловое ускорение положительно; при
D w < 0 угловая скорость убывает и угловое ускорение отрицательно.
Частный случай вращения – вращение с постоянным угловым ускорением – равноускоренное или равнозамедленное вращение:
b = const
В этом случае угловая скорость вращения меняется по закону: w (t) = w o + b (t – to), где w o – начальная угловая скорость в момент времени to. Если to = 0, то
w (t) = w o + b t
Угол поворота φ в момент времени t в этом случае будет равен:
j (t) = φ o + w o (t – to) + b (t – to)2/2.
При to = 0 имеем:
φ(t) = φo + wot + bt2 / 2
Здесь φ o – угол поворота в начальный момент времени.