Силы, действующие на ветроколесо.
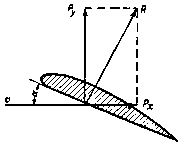
Ветроколесо работает за счет подъемной силы R, возникающей на крыле при набегании на него воздушного потока (фиг. 7).
Подъемная сила на крыле.
Силу R можно разложить на две:
1.Сила P y - направлена перпендикулярно потоку (подъемная). Производит полезную работу
2. Сила P x - направлена по потоку (сила сопротивления)
сила Ру несет полезную работу, сила же Рх никакой полезной работы не дает, а наоборот, вызывает потери энергии воздушного потока.
Поэтому необходимо стремиться получить такое крыло, которое в работе могло бы давать большую подъемную силу P y и минимальную силу сопротивления P x. Это соотношение между Ру и Рх будет зависеть от формы крыла и угла наклона а его поверхности к потоку.
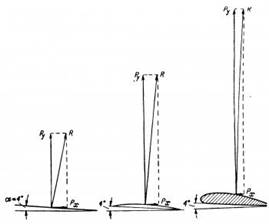
На рисунке показаны профили крыльев: плоский в виде дужки и обтекаемый. Для сравнения силы, возникающие на этих крыльях, изображены в одинаковом масштабе. Отсюда видно, что наибольшая подъемная сила Ру и наименьшая сила сопротивления Рх получаются у крыла с обтекаемым профилем. Следовательно, ветродвигатели с таким профилем крыла будут работать наиболее эффективно. Особенно важно делать крылья с таким профилем лопастей у быстроходных ветродвигателей.
Зависимость мощности ветровой энергоустановки от скорости ветра.
Скорость ветра, – одна из основных характеристик, отражающая природный процесс горизонтального переноса воздушных масс (потока воздуха) над поверхностью Земли.
Показатель сильно зависит от множества факторов (например, от давления атмосферы, от вращения самой планеты, от разницы нагрева воздуха в разных местах, от теплоемкости поверхности на них), резко отличается по величине в разных регионах.
От скорости ветра зависит мощность ветрового потока – показателя, который является важнейшим для расчета и выбора ветрогенераторов. Связь этих характеристик прямо пропорциональная и выражается формулой (1):
Nп = (ρ*S*V³)/2 (1),
где:
- Nп – мощность потока воздуха (Вт);
- V – скорость ветра (м/сек);
- ρ – плотность воздуха (кг/м³) (стандартное ее значение при температуре +15°С и давлении 760 мм ртутного столба 1,225 кг/м³);
- S – площадь «ометания» ротора (м²) (практически равна площади круга, который описывают при движении самые удаленные от оси вращения кромки лопастей ветрогенератора); она вычисляется по формуле (2):
S =π*d²/2 (2),
где:
- π = 3,1416;
- d – диаметр ветроколеса (м).
Из приведенных формул видно, что мощность (Nп) изменяется пропорционально кубу скорости (V) и квадрату диаметра (d)ветротурбиныветрогенератора.
Это означает, что при увеличении скорости ветра или длины лопастей в 2 раза мощность (энергия) воздушного потока возрастет в 8 и 4 раза, соответственно.
Способы управления в ветроэнергетических системах.
Каждый модуль мультимодульнойветроэлектростанции содержит (рис. 1):
1 - ветроколесо (ВК), установленное на неподвижном валу и расположенное в роторе электрического генератора,
2 - электротехнический комплекс, состоящий из:
- синхронного генератора с магнитоэлектрическим возбуждением от постоянных магнитов неодим-железо-бор (NdFeB),
- электромеханической системы перемещения ветроколеса,
- преобразователя частоты, выполненного по схеме инвертора тока,
- блока аккумуляторных батарей.
Существует два типа алгоритмов отслеживания TММ(точка максимума мощности), а именно:
1. Методы, основанные на знании параметров ветрогенератора (коэффициента использования энергии ветра Cp, быстроходности Z)
2. Методы, которые позволяют выполнить поиск точек, соответствующих максимальной мощности, не зная характеристик ветрогенератора.
В рамках этих алгоритмов существует три метода поиска ТММ: метод обеспечения работы ветрогенератора с постоянной оптимальной величиной быстроходности Z; метод на основе сигнала обратной связи и метод поиска экстремума.
В первом методе управления регулируется скорость вращения генератора в целях поддержания оптимального значения быстроходности Z, при котором мощность ветрогенератора является максимальной. Этот метод требует наличия датчиков скорости ветра для измерения скорости и частоты вращения ветрогенератора, а также знания оптимального значения Z ветроколеса для того, чтобы система могла извлечь максимально возможную мощность.
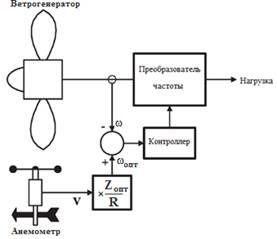
Рис. 2 - Система управления, основанная на поддержании оптимального значения быстроходности
Во втором методе управления требуется знать максимальную мощность ветровой турбины и отслеживать эту мощность через его механизмы контроля. Система управления основана на зависимости оптимальной мощности Рd от частоты вращения w, которая обычно хранится в памяти микроконтроллера. Система управления основана на измерении скорости вращения ветроколеса, вычислении выходной мощности и сравнении данных с фактическим значением выходной мощности.
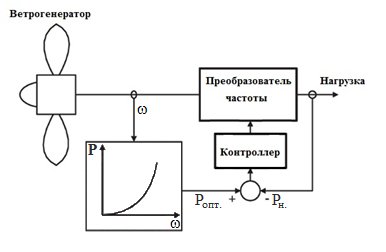
Рис. 3 - Мощность сигнала управления с обратной связью
Существует система управления, состоящая из двух контуров: внутреннего (контроль текущих значений тока и частоты вращения) и внешнего контуров электромеханической мощности. Синхронный генератор на постоянных магнитах соединен с ветроколесом напрямую [5].
Недостатком двух вышеописанных методов управления является то, что они основаны на знании оптимальной мощности и быстроходности ветрогенератора в зависимости от частоты вращения ветроколеса, которая обычно не известна с высокой степенью точности.
В третьем методе алгоритм управления непрерывно ищет ТММ ветрового колеса. Это позволяет преодолеть некоторые из общих проблем, которые обычно присущи двум другим методам.