Нет наверное в сегодняшней биомеханике задачи интереснее, чем попытка построения модели (создания теории) реализующей принципы формирования и реализации двигательных задач в человеческом организме. Ведь в случае успеха, такая модель помогла бы осветить широчайший круг проблем связанных с пониманием сути движений, роли центральной нервной системы в организации двигательных актов, а так же степени участия среды при реализации конкретного движения.
По всей видимости эта задача не может быть решена с помощью используемых сегодня методов описания человека. В этой области решение множества частных задач не всегда приводит к пониманию общей проблемы (ведь куча деталей - это еще не машина, а толпа солдат - еще не армия).
Согласно теореме Геделя, никакая система не может быть описана средствами самой системы, отсюда следует, что самые подробные биомеханические и физиологические исследования не опишут человека, если мы будем описывать только человека. Напрашивается вывод - попытаться описать человека как явление, как некую целостность, гармонично сочетающуюся с процессами происходящими в среде обитания (причем под средой необходимо понимать всю совокупность природных и социальных условий, в которых протекает жизнедеятельность человеческого организма). По сути мы должны описать человека как часть системы: "человек-среда".
Существует не слишком много совершенно определенных (и однозначно трактуемых человеческим разумом) направлений плотного взаимодействия человека со средой обитания. Одно из них - борьба за выживание. Причем из всего спектра приемов и способов, применяемых живым организмом в этой борьбе, мы должны обратить внимание на главный - двигательный способ.
Со времени появления на земле живых организмов, двигательный способ был основным при решении задач питания, размножения и, что самое главное, самосохранения. На любой из сигналов (раздражений) поступивших от среды, организм был обязан ответить достаточно мощным, сильным и быстрым (т.е. адекватным) двигательным актом. Выполнение правила "адекватного поведения" служило допуском к сосуществованию со средой.
В пользу человека (как впрочем и других высших организмов), на этом направлении, ударно потрудилась эволюция, и, если не тратить времени на критику результатов этой работы, нам придется признать, что в качестве тела, человек получил почти идеально притертую к среде обитания биомеханическую систему.
|
|
Это заключение позволяет рассматривать строение (морфологию) человеческого тела как объемный код (голограмму), несущий в себе всю информацию как о целях создания существующей схемы так и о способах решения этих задач.
Расшифровав морфологию тела как ответную (противовесную) часть среды обитания и определив цену, которую организм платит этой среде за право относительно безопасного существования, мы можем получить методический ключ к пониманию принципов реализации двигательной активности биомеханических систем.
Нужный результат можно получить, рассматривая самую жестокую (по отношению к человеку) и компактную (по ставящимся целям и задачам) модель борьбы за существование - единоборство. Причем из всех вариантов единоборства нужно выбрать систему рукопашного боя, которая бы решала задачу кардинальным способом (исключить борьбу за очки, баллы и т.д.). Возможности такой системы должны строиться исключительно на биомеханических и физиологических особенностях человеческого организма и исключать поэтизацию и эмоциональную окраску в описании технических действий (удар - "хвост дракона", стойка - "журавль", взгляд - "лунный свет" и т.д.).
Достигнуть в этом направлении определенных результатов удалось исследовательской группе "Магистр", использовавшей для постановки экспериментов элементы рукопашного боя по системе Кадочникова А.А., (возможности системы до сих пор не замечены научными кругами и специалистами- практиками). Достоинства системы Кадочникова А.А. - тема для отдельного разговора, нам же необходимо отметить, что теоретическое обоснование системы построено только на законах физики, механики (ее разделов: кинематике, статике, динамике) и с учетом физиологии человеческого тела. Главное, эта система исходит из возможностей человеческого тела и ее использование в рамках решаемых проблем вполне корректно...
Начнем с того, что определим задачу и способ ее решения:
Задача - описать взаимодействие двух человек в рукопашной схватке.
Способ решения - создание рабочей модели такого взаимодействия на базе имеющихся знаний о физиологии человеческого тела и законах реализации движения. Причем тело человека, по отношению к сознанию, будет рассматриваться как сложный инструмент с присущими ему сильными и слабыми сторонами.
Такой прием позволит решить многие проблемы:
|
|
· построение модели позволяет максимально упростить схему описания сложнейших процессов (биомеханику человеческого тела представить как взаимодействие нескольких простых звеньевых структур, работу центральной нервной системы свести к понятной кибернетической схеме и т.д.);
|
|
· в рамках принятой модели исследователю (бойцу N 1) противостоит представитель "среды" (боец N 2), и так как противодействуя "исследователю" он фактически перепроверяет его права на дальнейшее существование, то правильно организованные схемы противодействия могут проявить реальные возможности человека при решении двигательных задач в экстремальных условиях;
· мы можем заставить модель целенаправленно действовать в рамках закона "адекватного поведения", что дает право на прогнозирование результата при исследовании конкретных двигательных задач;
· такая схема дает возможность детально контролировать и объективно оценивать исследуемые двигательные задачи, так как в качестве "среды" выступает способный на такие оценки человек.
Теперь попытаемся сориентироваться в круге проблем, с которыми придется столкнуться выстраивая рабочую модель боевого взаимодействия двух биомеханических систем, коими и являются, в плане земного существования, человеческие тела.
Центральной фигурой предполагаемой модели является человек с богатейшим набором дарованных ему при рождении и благоприобретенных возможностей.
Грубо очертим состав основных из них:
Человеческое тело состоит из развитого скелета, имеющего в своем составе более 200 костей. Наличие одно и двухстепенных суставов позволяет скелету реализовывать многие сотни степеней свободы (отдельных направлений подвижности).
У этого привода человеческого организма есть не менее достойный двигатель - мышечная система, в подавляющей своей части состоящая из поперечно-полосатой мышечной ткани, способной почти мнгновенно высвобождать огромные мощности представляющие серьезную опасность для собственного скелета и потому требующие детального и строгого контроля со стороны ЦНС (центральной нервной системы).
Собственно ЦНС. Это многоуровневая, построенная по иерархическому принципу командная система, несущая на себе всю тяжесть ответственности по организации и реализации двигательных задач с соотнесением предпринимаемых действий с условиями окружающей среды.
Возглавляет эту структуру своеобразная президентская власть - кора головного мозга (КГМ). У этой власти есть свои представители на местах, что позволяет КГМ осуществлять особо важные (точные) движения в обход пирамидной иерархии ЦНС.
Абсолютно осознанно мы останавливаемся на этом далеко не полном перечне, оставляя за бортом многие сотни отправляемых человеческим организмом функций, с целью максимального упрощения выстраиваемой базовой схемы (любая модель должна быть принципиально проще рассматриваемой с ее помощью проблемы).
Теперь рассмотрим трудности связанные с реализацией любого двигательного акта в человеческом теле, вытекающие из дарованных нам возможностей. Трудности эти давно и детально описаны в работах Н.А. Бернштейна, поэтому здесь будут приводиться (иногда почти дословно) значительные выдержки из них.
Итак о трудностях управления движением:
Трудность N1 - Необходимость преодоления огромного избытка степеней свободы которыми насыщено наше тело. Человеческому организму приходится изрядно потрудиться чтобы отделить нужные для реализации движения степени свободы и заблокировать избыточные.
Отсюда несколько полезных выводов:
· организм неизбежно загружается значительной селективной работой при выполнении самых элементарных двигательных задач;
· изучая какое либо новое для нас движение мы не выдумываем ничего оригинального, а только отдаем предпочтение какому ни будь варианту из многих тысяч имеющихся.
Трудность N2 - Так как движение осуществляется посредством тяги, то для обеспечения возвратно-поступательных движений каждое отдельное направление подвижности обеспечивается двойным набором мышц - мышц антагонистов.. Следующая сложность связана со свойствами мышечной тяги, это тяга не жесткая и точная, а упругая, при которой требуемая точность движения обеспечивается всеми группами мышц обслуживающими данную степень свободы.
Полезные выводы:
· любое сложное движение осуществляемое человеком в пространстве влечет за собой задействование абсолютного большинства скелетных мышц, (что позволяет говорить об отсутствии какого либо оперативного резерва), и для выполнения вновь возникшей двигательной задачи человек обязан снять с мыщц необходимость выполнения предыдущей и, после необходимой фазы расслабления, загрузить их новой;
· из физики нам известно, что сила приложенная к объекту производит максимум работы только в плоскости ее приложения, а значит любое изменение угла места объекта автоматически приводит к смене задач хотя бы для некоторых групп мышц;
· если извне приложить силу к костно-мышечному аппарату человека, то активное сопротивление внешней силе мы вправе ожидать только в плоскости ее приложения.
Трудность N3 - необходимость распределения внимания между сотнями видов подвижности и стройного согласования их между собой. Для ее решения человеческий организм имеет выверенный миллионами лет эволюции механизм - центральную нервную систему. Эту систему природа собирала из отработанных, проверенных и зарекомендовавших себя комплектующих, принадлежащих ранее различным видам живых существ господствовавших на земном шаре. Схема гениально проста и имеет вид многоэтажной постройки. Все уровни находятся между собой в отношениях начальников к подчиненным, т.е. образуют то, что называют иерархией.
Получив эту структуру в наследство, человек получил и чисто свой этаж - развитую кору головного мозга с заложенной в ней способностью руководить мышцами (когда это нужно) в обход имеющейся многоуровневой структуры (упоминавшийся ранее президентский способ управления).
Все эти этажи условно поделены на уровни передачи нервных импульсов(они же уровни построения движения):
Уровень А - работает с нервными клетками спинного мозга (у них прямая связь с мышцами тела). Самостоятельно выполняемая функция - тонусные напряжения мышц.
Уровень В - уровень мышечно-суставных увязок, иначе уровень синергий. Работает без привлечения сознания. Практически лишен переключаемости и инициативы.
Уровень C - Уровень пространства. Коррекции уровня С, направляя движение, следят только за тем, как оно вписывается во внешнее, чуждое нашему телу пространство.
Важная характеристика движений уровня С -переключаемость!
Уровень D - Уровень действий. Это первый человеческий уровень.Уровень D напрямую связан с рукой человека.
Весь костно-суставно-мышечный аппарат строго симметричен (в отличие от внутренних органов). Поэтому все типичные движения и координации по уровням А,В и С точно так же двусторонни и симметричны. А в уровне D правая рука резко опережает левую.
В отношении уровней А,В,С вполне симметричны и оба полушария головного мозга.
Учитывая все вышесказанное, мы вправе сделать следующие логические заключения:
ЦНС это многоуровневая структура с жестким подчинением нижестоящих уровней вышестоящим. Уровни А, В и С создают так называемый двигательный центр ЦНС. Под его руководством оказываются все скоростные и силовые возможности организма, в то же время, это сильно заорганизованная, прямолинейная, а значит и предсказуемая структура.
Уровень D, со своим непосредственным начальником - корой головного мозга, образуют свой двигательный центр, который имеет возможность без посредников руководить мышечными сокращениями. Эта командная структура свободна от тяжелых задач нижестоящего центра, отличается изворотливостью и, как следствие, мало предсказуема. Однако эта структура относительно медлительна, и, что очень важно, подчиненный центр об этом знает...
В теоретической физиологии существует условное разделение ЦНС на центры, по признакам преимущественно решаемых ими задач. Таких центра три: эмоциональный, аналитический и двигательный. Для упрощения обозначений уровней построения движения, мы соотнесем их с центрами ЦНС. При этом всю многоуровневую двигательную систему ЦНС в дальнейшем будем именовать двигательным центром (Дц), а корковую двигательную систему будем считать (так оно и есть на самом деле) частью аналитического центра (Ац). Описание эмоционального центра пока выпадает за рамки рассматриваемой задачи. Последнее, что нужно сказать о центрах, это то, что они различаются по скорости принятия решений: двигательный центр быстрее аналитического в 30 000 раз и на столько же медленнее эмоционального.
Теперь несколько полезных выводов:
· человек имеет две двигательные системы находящиеся в отношениях старшего (корковая двигательная система или Ац) и младшего (двигательная система ЦНС или Дц);
· двигательная система ЦНС это опытнейший профессионал (миллионы лет эволюции) по части осуществления огромного количества двигательных задач присущих животному царству и требующих всех необходимых для этого качеств. Большинство этих задач двигательная система ЦНС выполняет самостоятельно (задачи уровня С), под присмотром корковой двигательной системы, использующей эти движения в своих целях (как фоновые движения, как своего рода рабочую лошадь). После чего корковая двигательная система пристраивает свои собственные движения "тонкой коррекции" в качестве наездников для фоновых;
· несмотря на подчиненное состояние, только двигательная система ЦНС может с максимальной мощностью, скоростью и точностью притереть любое движение к окружающей среде. Более гибко это может сделать корковая система (не надо забывать, что она вооружена кистями рук), но, и это очень важно, значительно медленнее (в 30000 раз). Исходя из перечисленных возможностей определяется и "руководитель" для конкретной двигательной задачи;
· само наличие такой специализации делает невозможным (до смены двигательной задачи) произвольную передачу или перехват управляющих функций ни одним из центров.
Этих предварительных заключений еще недостаточно для анализа всего видимого нами разнообразия и непредсказуемости движений человеческого тела. Для решения этой задачи разобьем процесс на более простые и всем понятные составляющие...
Одну из величин решаемой нами задачи подсказывают сами условия нашего существования на земном шаре. Эта величина непосредственно участвовала в процессе формирования нашего скелета, во многом определяла порядок работы ЦНС при подготовке и реализации двигательных актов. Мы говорим о земной гравитации. Это противник который не отпускает ни на секунду, любое движение человек осуществляет с учетом его противодействия. Вставая утром с постели и принимая вертикальное положение, человек вступает с гравитацией в нешуточную борьбу за равновесие...
Создаваемая нами модель должна учитывать механизм этого противодействия.
Нам известно, что тело находится в состоянии устойчивого равновесия если его центр массы находится над центром площади опоры, и неустойчивого равновесия, когда центр масс находится над ее границей, если центр массы выходит за границу площади опоры - тело опрокидывается. Для предотвращения опрокидывания необходимо: либо центр массы вернуть к середине площади опоры, либо середину площади опоры подвести под центр массы. Эту же задачу решает и человеческий организм - реализуя какие либо двигательные акты. Действительно, с точки зрения физиологии любой способ восстановления равновесия хорош, или мы выносим часть массы тела (руки) за пределы площади опоры и возвращаем их назад после удара, или, захватив руками какой то предмет, подшагиваем к нему подводя площадь опоры под общий для системы (человек-объект) центр массы.
Таким образом вырисовывается простая схема - каждый раз совершая любой двигательный акт, человек, ради выполнения поставленной задачи, стремится выйти из состояния устойчивого равновесия в неравновесное состояние (или состояние неустойчивого равновесия) и вернуться в равновесное состояние после ее завершения... Такой набор элементарных двигательных схем (ввиду их повторяемости) можно назвать циклом, а движения вызывающие к жизни этот набор - циклическими. Т.к. любое движение человеческого тела в пространстве попадает под эту схему, то, с точки зрения рассматриваемых величин, любой целевой двигательный акт может считаться циклическим...
Это крайне важное логическое заключение позволяет провести системную атаку еще недавно казавшейся неприступной крепости. Примененное нами определение "циклический" к интересующим нас процессам, позволяет применить и присущий этому классу задач метод их описания: мы получаем возможность четко обозначить границы (начало и конец) интересующего нас процесса (целевого, т.е. имеющего цель двигательного акта), определить его максимальные и минимальные характеристики, определить протяженность во времени, последовательность прохождения определенных фаз...
Рассмотрим графическое изображение циклического процесса. Для начала посмотрим в словарь и отыщем там значение слова цикл.
Цикл - совокупность каких-либо явлений, процессов, работ, составляющих законченный круг действия... Если мы представим интересующий нас процесс в качестве точки на окружности, то пройденный ей по окружности путь будет обозначать законченный цикл. Если дополнительно заставить центр окружности осуществлять равномерное движение по прямой перпендикулярной ее плоскости (моделируя развитие процесса во времени), то в результате одновременного движения точки окружности по двум направлениям мы получим винтовую линию.
Проекция винтовой линии на плоскость (сделаем это для удобства ее рассмотрения) будет иметь вид всем нам знакомой синусоиды... 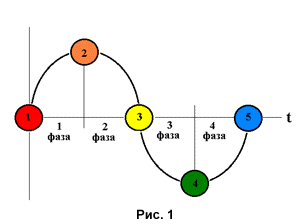
Проанализируем эту кривую... Она обладает несколькими замечательными особенностями:
Кривая, пересекая линию t, очерчивает две площади - "положительную" и "отрицательную" полуволны, которые равны по площади и уравновешивают друг друга;
Кривая имеет несколько точек, которые непохожи ни на одну другую этой же кривой. Точка N1 - после нее процесс усиливается в "положительной" полуволне. Точка N2 - точка неустойчивого равновесия, после нее меняется направление развития процесса, он идет на спад. Точка N3 - процесс проходит через линию равновесия (t) и переходит в отрицательную полуволну. Точка N4 - точка неустойчивого равновесия, после нее процесс меняет направление развития. Точка N5 - точка устойчивого равновесия, цикл завершается.
Приведенный здесь грубый анализ кривой позволяет сделать определенный вывод: процесс выхода какой либо системы из состояния устойчивого равновесия и возврат к первоначальному состоянию имеет четыре фазы и характеризуется пятью (пять точек рассмотренной синусоиды) пограничными состояниями. Но не надо забывать, что синусоида в нашем случае была лишь проекцией винтовой линии на плоскость, и если мы посмотрим на винтовую линию со стороны оси времени, (вокруг которой и развивается процесс), то отметим интересный момент: точка N1 (начало цикла) и точка N5 (конец цикла) в пространстве совпадают накладываясь друг на друга. Собственно видим мы лишь точку N5, как событие по времени более позднее чем событие в точке N1. 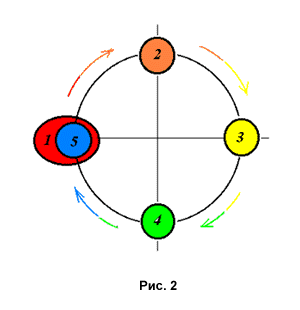
Теперь изображение цикла предстает для нас в виде окружности симметрично разделенной на дуги четырьмя точками с номерами 2,3,4 и 5.
Основной вывод, который подсказывает результат анализа одного цикла задачи о сохранении равновесия биомеханической системой - минимальное количество фаз подлежащих рассмотрению при поэтапном освещении процесса движения в человеческом теле - четыре.
Настала пора поговорить о второй составляющей выстраиваемой нами рабочей модели...
Скелет. Костный аппарат биомеханической системы, то, что собственно и определяет внешний вид человеческого тела.
В результате эволюции человек получил крепчайший каркас обладающий к тому же феноменальной гибкостью. Один только позвоночник с его 25 межпозвоночными соединениями, способен к разнообразнейшим, почти змеиным изгибам, наклонам и извивам. С туловищем соединены посредством шарниров (как известно, обладающих наибольшим разнообразием подвижности) - плечевых и тазобедренных сочленений - четыре многозвенные рычажные системы конечностей. Весь этот новый (по отношению к мягкотелым) костно-мышечный аппарат был с ювелирной точностью приспособлен к отработанным (на тех же мягкотелых) способам реализации двигательных актов - сегментарных (члениковых) последовательных (волновых) смещений частей тела интегрированных в едином ритме и в общем смысловом содержании всего движения.
Оказывается способность к гибким, волнообразным движениям заложена в нас генетически в виде закона, и не является чем то необычным. Так почему же в обычных условиях (без преднамеренной ее демонстрации) мы не отмечаем наличие "волны" в движениях человеческого тела? Потому, что ее как раз и скрадывает наличие развитого костного аппарата, который с помощью имеющегося у него набора рычагов доводит движение до нужной точки пространства раньше, чем оно станет похожим на волну...
Учитывая сказанное, мы должны признать, что потенциал у этой системы огромный, и пересчитать все варианты возможных движений - задача невыполнимая, счет пойдет на многие тысячи... Поэтому мы посчитаем условия, которые создают эти неисчеслимые возможности.
Посмотрим на скелет как на звеньевую структуру и выделим основные из них. С этой точки зрения все выглядит гораздо проще: 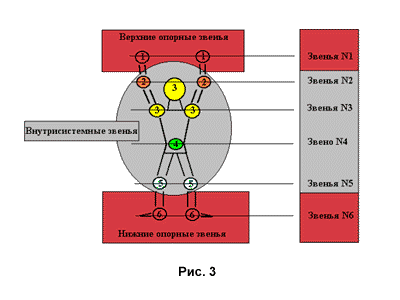
Прокомментируем представленную на рисунке нумерацию.
Звенья N1 - лучезапястные сочленения рук.
Звенья N2 - локтевые суставы рук.
Звенья N3 - плечевые суставы. К этому номеру относятся так же шея и голова. Они хотя и не участвуют в движениях реализуемых плечевым поясом, но зато это хорошие точки приложения внешних к системе сил для смещения плечевого пояса в пространстве (при управлении извне движениями человеческого тела).
Звено N4 - учитывая относительно небольшую самостоятельную подвижность тазобедренных суставов, всю совокупность сочленений в области тазовой кости в дальнейшем будем принимать за одно звено.
Звенья N5 - коленные суставы ног.
Звенья N6 - голеностопные суставы ног.
Нумерация звеньев на приведенной схеме начата с верхних опорных звеньев (создают точки опоры при выполнении большого класса двигательных задач связанных с висом, подтягиванием, толчками, отодвиганием и т.д.) абсолютно осознано, так как это позволит нам в дальнейшем упростить отслеживание начальной фазы интересующих нас двигательных актов. Хотя физиологически такая нумерация ничем не оправдана и каждое звено может претендовать на почетный N1, а особенно тазобедренные звенья. Ведь именно с этих звеньев (как находящихся в непосредственной близости от центра масс) реально и начинается любое движение связанное с перемещением тела в пространстве.
В результате предпринятых нами логических построений получилась довольно простая механическая модель костного аппарата человеческого тела.
Теперь о третьем условии, без учета которого невозможно "оживить" выстраиваемую модель реализации движения в человеческом теле - о ЦНС.
Центральная нервная система - это бесконечно сложное по организации и отправляемым функциям образование. Проблемы связанные с ЦНС будут решаться еще не одно столетие. Поэтому мы, при рассмотрении ЦНС, будем ставить перед собой только реальные задачи...
Вспомним крайне важный для нас момент: работы Н.А.Бернштейна в области физиологии движения доказали возможность изучения работы мозга человека по реализуемым им движениям. Практическая психология давно и успешно использует наличие довольно жесткой связи между определенными мыслеформами и связанными с ними двигательными актами.
Мы попытаемся разобраться с частной задачей - какие отделы ЦНС и в какое время ответственны за конкретные классы двигательных задач.
Для этого соотнесем несколько моментов рассмотренных нами ранее.
Первый момент. Двигательных центра два и у них разные возможности.
При этом Ац, являясь главнокомандующим, может движения организованные "двигательным центром" использовать в качестве фоновых к своим движениям, так называемым "движениям тонкой коррекции".
Второй момент, который мы соотнесем с только что рассмотренным, заключается в особенностях костного аппарата человеческого тела, вернее в особенностях его звеньевой структуры. Мы с вами уже определили, что цепочка сочленений костей скелета состоит из 6 основных уровней и что звенья уровней 1 и 6, по отношению ко всей костной системе, являются опорными. Из рассмотренных выше материалов мы уже знаем, что исключительным правом управлять опорными звеньями (при выполнении ими движений "тонкой коррекции") владеет "аналитический центр" (что строго говоря и сделало человека человеком). quot;Аналитический центр" может управлять и движениями всех остальных звеньев, особенно при реализации ранее не встречавшихся двигательных задач (собственно говоря все новые двигательные задачи сначала изучаются, обкатываются "аналитическим центром" и при отработке оптимальных условий их выполнения ответственность за их реализацию передается в "двигательный центр"). Естественно все что делает в области движений "аналитический центр" отличается высокой координацией, милиметровой точностью и невероятной изворотливостью, но не может похвастаться мощностью, резкостью и скоростью.
Дальше логика подсказывает кому подчиняются движения, реализацией которых занимаются звенья уровней 2,3,4 и 5. Совершенно верно - здесь властвует "двигательный центр". В этом машинном отделении исправно выдают необходимые по мощности, скорости и амплитуде движения не особенно задумываясь над курсом корабля и о грузе заключенном в его трюмах. Да собственно кому там думать? Уровень А - уровень молюсков. Уровень В - уровень степенно пасущихся динозавров. Уровень С - вроде уровень с умом, но ума хватает только на постижение непосредственно окружающего тело пространства. Давайте спросим себя, много ли ума в жужжании перевернутой вверх колесами радиоуправляемой модели автомобиля? А что ее делает такой беспомощной? Ответ прост - отсутствие сцепления с поверхностью дороги (пола). Физика утверждает, что ни одна физическая система не может передвигаться в пространстве за счет своих внутрисистемных движений. Движение становится возможным только при подведении к системе внешней для нее силы. Система должна получить надежную точку опоры! Такой точкой опоры для модели автомобиля будет внешняя для нее сила - сила трения.
А как обстоят дела с перемещением в пространстве человека? Давайте положим его набок, пусть лежит на полу лишенный необходимой для его нижних опорных звеньев силы трения. Попросим лежащего совершать привычные для него двигательные акты связанные с хотьбой. Ничего путного из этих движений не получится до тех пор, пока мы не подставим под движущиеся в пространстве опорные звенья какие ни будь точки опоры (например подставим свою ногу), что сразу сделает возможным смещение системы в пространстве.
Рассмотренная ситуация позволяет сделать несколько интересных выводов: 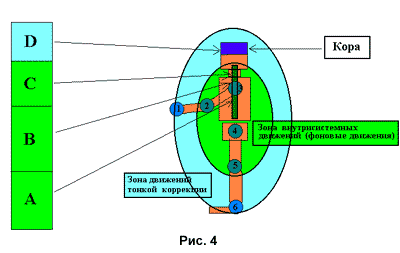
· Звенья 2,3,4 и 5 реализую внутрисистемную работу, которая обеспечивает условия (при подведении к системе внешних сил) перемещения человеческого тела в пространстве. Движения эти цикличны (так как в их основе лежит борьба за равновесие) и могут быть подвергнуты анализу с использованием схемы приведенной на рис.4; Как раз эти движения отличаются максимальной мощностью, резкостью, скоростью и предсказуемостью;
· Звенья 1 и 6 - опорные, и вместе со своим великим покровителем "аналитическим центром" они (в подавляющем количестве движений - верхние опорные звенья) выполняют самую точную и высоко скоординированную работу используя внутрисистемные движения как фоновые;
· Вспомнив о жесткой взаимосвязи реализуемых движений с "действиями" ЦНС по их руководству мы вправе утверждать, что возбудив извне движение в внутрисистемных звеньях, мы возбудим и работу "двигательного центра" ЦНС (со всеми особенностями его функционирования), а обеспечив какие либо "неудобства" для опорных звеньев мы автоматически подключаем к работе "аналитический центр". И что особенно важно, ни один из них не может помешать работе другого в момент выполнения им своих обязанностей.