Определение нагрузочной характеристики. Среди нагрузочных характеристик синхронной машины интерес представляет характеристика, соответствующая чисто индуктивной нагрузке при номинальном токе. Обычно можно ограничить опыт получением только одной точки этой характеристики при номинальном напряжении. Этот опыт возможен в режиме генератора и двигателя.
СМ синхронизируют с сетью и поднимают возбуждение до той поры пока отдаваемый машиной ток не станет равным номинальному. Если машина имеет приводной двигатель, то его следует регулировать так, чтобы между машиной и сетью не было обмена активных мощностей и все потери покрывались приводным двигателем. С помощью ваттметра необходимо следить, чтобы cosφ = 0. (Показания равны нулю при способе одного или трех ваттметров, или равенство показаний но разных знаков при способе двух ваттметров). При испытании напряжение и ток якоря могут отличаться от номинальных не более чем на ± 15%. В этом случае для определения тока возбуждения можно применить следующий графический метод (рис. 5.18). В системе координат U = f(i) строится характеристика холостого хода и точка С, соответствующая измеренным значениям напряжения и тока возбуждения при коэффициенте мощности равном нуля, и измеренном токе якоря. Влево от этой точки откладывается ток возбуждения при коротком замыкании iк, соответствующий току якоря I достигнутому в опыте.
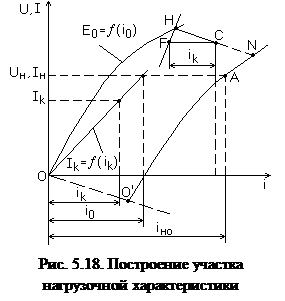 Через конец F полученного отрезка проводится прямая, параллельная начальной прямолинейной части характеристикиХХ, до пересечения с характеристикой в точке Н и прямая через точки Н и С; на последней откладывается отрезок HN, определяемый равенством
Через конец F полученного отрезка проводится прямая, параллельная начальной прямолинейной части характеристикиХХ, до пересечения с характеристикой в точке Н и прямая через точки Н и С; на последней откладывается отрезок HN, определяемый равенством 
Если перенести характеристику холостого хода параллельно самой себе по направлению этого отрезка так, чтобы она прошла через точку N, то она будет являться нагрузочной характеристикой при cosφ = 0 и номинальном токе, а точка на ней, соответствующая номинальному напряжению, с достаточной точностью даст исправленный результат опыта. Перпендикуляр, опущенный из точки А на ось абсцисс отсечет на ней ток возбуждения iно соответствующий номинальному току якоря при напряжении U = UH и cosφ = 0.
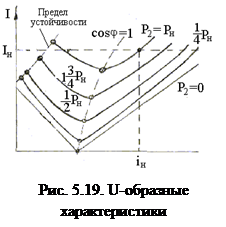 Определение U-образной характеристики. Зависимость тока якоря от тока возбуждения при неизменном напряжении на выводах благодаря своей форме (рис. 5.19) носит название U-образной характеристики. Эта характеристика может быть определена в режиме как двигателя, так и генератора, при различных активных нагрузках; но наибольший интерес представляет характеристика в режиме ненагруженного двигателя (P2 = 0). Точка А этой характеристики, соответствующая номинальному потребляемому току при номинальном напряжении и перевозбуждении, является одновременно точкой характеристики, получение которой описано выше.
Определение U-образной характеристики. Зависимость тока якоря от тока возбуждения при неизменном напряжении на выводах благодаря своей форме (рис. 5.19) носит название U-образной характеристики. Эта характеристика может быть определена в режиме как двигателя, так и генератора, при различных активных нагрузках; но наибольший интерес представляет характеристика в режиме ненагруженного двигателя (P2 = 0). Точка А этой характеристики, соответствующая номинальному потребляемому току при номинальном напряжении и перевозбуждении, является одновременно точкой характеристики, получение которой описано выше.
Самая нижняя точка на каждой U-образной характеристике соответствует минимальному току якоря при данной отдаваемой мощности P2 для генератораили потребляемой мощности P1 для двигателей, т.е. максимальному значению коэффициента мощности cosφ = 1. Если соединить эти точки между собой (штриховая линия в середине рис. 5.19), то получится регулировочная характеристика для случая cosφ = 1, или зависимость тока возбуждения от тока нагрузки i = f(I)при неизменных напряжении и коэффициенте мощности, только изображенная наоборот – в виде I = f(i).
Если соединить все точки обрыва характеристик плавной кривой (штриховая кривая в левом верхним углу рис. 5.19), то она будет являться пределом устойчивой работы с недовозбуждением при данном напряжении.
 Определение номинального тока возбуждения. Если ток возбуждения СМ при нагрузке не может быть определен непосредственно из опыта, то его следует получить построением векторной диаграммы, использующей данные опытов ХХ и К3 и известной под названием диаграммы Потье. Для этого к вектору тока якоря I под углом φ, соответствующем заданному коэффициенту мощности cosφ, пристраивается вектор напряжения U. Чтобы определить действующую в машине внутреннюю ЭДС EB, необходимо пристроить к вектору напряжения векторы активного и индуктивного падений напряжения в обмотке IR1 и IXP (рис. 5.20). Здесь под R1 понимается сопротивление при переменном токе учитывающее добавочные потери в проводниках обмотки, а под ХP – индуктивное сопротивление, приписываемое обмотке одной фазы при вращающемся роторе; оно не может быть непосредственно измерено и определяется опытным путем. Построение диаграммы обычно производится для работы машины в режиме генератора, хотя в случае ее работы в режиме двигателя некоторые векторы должны быть ориентированы иначе, это не вносит количественного измерения. Вектор активного падения напряжения IR1 следовало бы пристроить к концу вектора напряжения U параллельно вектору тока I; но даже в машинах небольшой мощности это падение настолько мало, что можно им пренебречь и пристроить к вектору напряжения U вектор индуктивного падения напряжения IХP так, чтобы он был опережающим на 1/4 периода по отношений к току I. Геометрической суммой векторов U и IXPбудет вектор ЭДС EB индуктированной в обмотке результирующим магнитным потоком.
Определение номинального тока возбуждения. Если ток возбуждения СМ при нагрузке не может быть определен непосредственно из опыта, то его следует получить построением векторной диаграммы, использующей данные опытов ХХ и К3 и известной под названием диаграммы Потье. Для этого к вектору тока якоря I под углом φ, соответствующем заданному коэффициенту мощности cosφ, пристраивается вектор напряжения U. Чтобы определить действующую в машине внутреннюю ЭДС EB, необходимо пристроить к вектору напряжения векторы активного и индуктивного падений напряжения в обмотке IR1 и IXP (рис. 5.20). Здесь под R1 понимается сопротивление при переменном токе учитывающее добавочные потери в проводниках обмотки, а под ХP – индуктивное сопротивление, приписываемое обмотке одной фазы при вращающемся роторе; оно не может быть непосредственно измерено и определяется опытным путем. Построение диаграммы обычно производится для работы машины в режиме генератора, хотя в случае ее работы в режиме двигателя некоторые векторы должны быть ориентированы иначе, это не вносит количественного измерения. Вектор активного падения напряжения IR1 следовало бы пристроить к концу вектора напряжения U параллельно вектору тока I; но даже в машинах небольшой мощности это падение настолько мало, что можно им пренебречь и пристроить к вектору напряжения U вектор индуктивного падения напряжения IХP так, чтобы он был опережающим на 1/4 периода по отношений к току I. Геометрической суммой векторов U и IXPбудет вектор ЭДС EB индуктированной в обмотке результирующим магнитным потоком.
 По характеристике ХX определяется ток возбуждения iB, который был бы необходим для создания магнитного потока, индуктирующего ЭДС EB; считается, что такой поток и существует в машине при нагрузке. Его вектор должен опережать ЭДС EB на 1/4 периода, однако вместо него может быть отложен вектор iB, совпадающий с ним по фазе. При нагрузке обмотки якоря током I она создает реакцию в общем стремящуюся размагнитить машину. Эта реакция должна быть уравновешена составляющей тока возбуждения iя, вектор которого параллелен вектору тока I, но направлен противоположно ему. Геометрическая сумма векторов iB и iя будет полным током возбуждения индуктора iп, необходимого для данногорежима работы.
По характеристике ХX определяется ток возбуждения iB, который был бы необходим для создания магнитного потока, индуктирующего ЭДС EB; считается, что такой поток и существует в машине при нагрузке. Его вектор должен опережать ЭДС EB на 1/4 периода, однако вместо него может быть отложен вектор iB, совпадающий с ним по фазе. При нагрузке обмотки якоря током I она создает реакцию в общем стремящуюся размагнитить машину. Эта реакция должна быть уравновешена составляющей тока возбуждения iя, вектор которого параллелен вектору тока I, но направлен противоположно ему. Геометрическая сумма векторов iB и iя будет полным током возбуждения индуктора iп, необходимого для данногорежима работы.
При практическом построении диаграммы треугольник составляющих тока возбуждения условно поворачивается на 90° по часовой стрелке так, что составляющая тока возбуждения iB совпадает по направлению с ЭДС EB, а составляющая iя, уравновешивающая реакцию якоря, становится перпендикулярной к вектору тока I (рис.5.21)
 Если проведены опыты XX, КЗ, нагрузке при cosφ = 0, то для получения индуктивного падения напряжения на характеристику XX следует нанести точку А, соответствующую нагрузке машины током Iпри напряжении U и cosφ = 0 (рис. 5.22), ее абсцисса OL дает ток возбуждения iно при этом опыте. От точки А влево откладывается отрезок АД, равный току возбуждения iк при симметричном коротком замыкании с током Iк = Iн.
Если проведены опыты XX, КЗ, нагрузке при cosφ = 0, то для получения индуктивного падения напряжения на характеристику XX следует нанести точку А, соответствующую нагрузке машины током Iпри напряжении U и cosφ = 0 (рис. 5.22), ее абсцисса OL дает ток возбуждения iно при этом опыте. От точки А влево откладывается отрезок АД, равный току возбуждения iк при симметричном коротком замыкании с током Iк = Iн.
Через точку D проводится прямая DB, параллельная нижней прямолинейной части характеристики XX. Длина перпендикуляра BG, опущенного на отрезок AD из точки пересечения B этой прямой с характеристикой XX, изображает индуктивное падение напряжения IHXP, а отрезок AG, отсекаемый этим перпендикуляром на прямой AD – составляющую тока возбуждения iя, уравновешивающую реакцию якоря, потому чтопри КЗ ток возбуждения iк состоит из двух частей: iя = AG уравновешивающей реакцию якоря и DG, необходимой для индуктирования ЭДС, покрывающей индуктивноепадение напряжения IXP.
Если известны данные обмоток якоря, индуктора, то для неявнополюсных машин составляющая тока возбуждения, уравновешивающая реакцию якоря, может быть вычислена по формуле

где ω1 – число витков одной фазы обмотки якоря; ω2 – число витков обмотки индуктора; k1, k2 – их обмоточные коэффициенты; a1, a2 – их числа параллельных ветвей. Отняв от тока возбуждения iк при токе короткого замыкания Iк = I составляющую iя, можно определить ЭДС, необходимую для покрытия индуктивного падения напряжения IXP и по характеристике XX соответствующую остатку от этого вычитания (отрезок DG на рис. 5.22).
Диаграмма должна бы строиться для фазных значений всех входящих в нее величин; т.к. характеристики обычно строятся для линейных значений, то диаграмму удобно строить для них. В формулу для составляющей тока возбуждения iя входит фазный ток, поэтому, если обмотка якоря сопряжена в треугольник, то следует пересчитать линейный ток в фазный.
 Этот способ может быть применен и для явнополюсных машин, если положить k2 = 1, но построение диаграммы дает для них не такое хорошее совпадение в действительностью, как для неявнополюсных, т.к. вычисленная составляющая iя недостаточно точно совпадает с определенной из опыта при cosφ = 0.
Этот способ может быть применен и для явнополюсных машин, если положить k2 = 1, но построение диаграммы дает для них не такое хорошее совпадение в действительностью, как для неявнополюсных, т.к. вычисленная составляющая iя недостаточно точно совпадает с определенной из опыта при cosφ = 0.
Построение диаграммы может быть заменено вычислением (рис. 5.23)

и по характеристике XX определяется соответствующий ей ток возбуждения iB тогда полный ток возбуждения
 ,
,
где  .
.
Сдвиг (φ + δ) между ЭДС EВ и током I является внутренним сдвигом фаз, аналогичным внешнему сдвигу фаз φ между напряжением U и током I, им определяется внутренняя мощность машины. По характеристике XX определяется ЭДС Еп соответствующая полному току возбуждения iп, она равна тому напряжению, которое устанавливается на выводах якоря при неизменном токе возбуждения и неизменной частоте вращения после отключения данной нагрузки.