Рассмотрим в качестве примера структуру привода поступательно движущейся каретки (рис. 2.8).
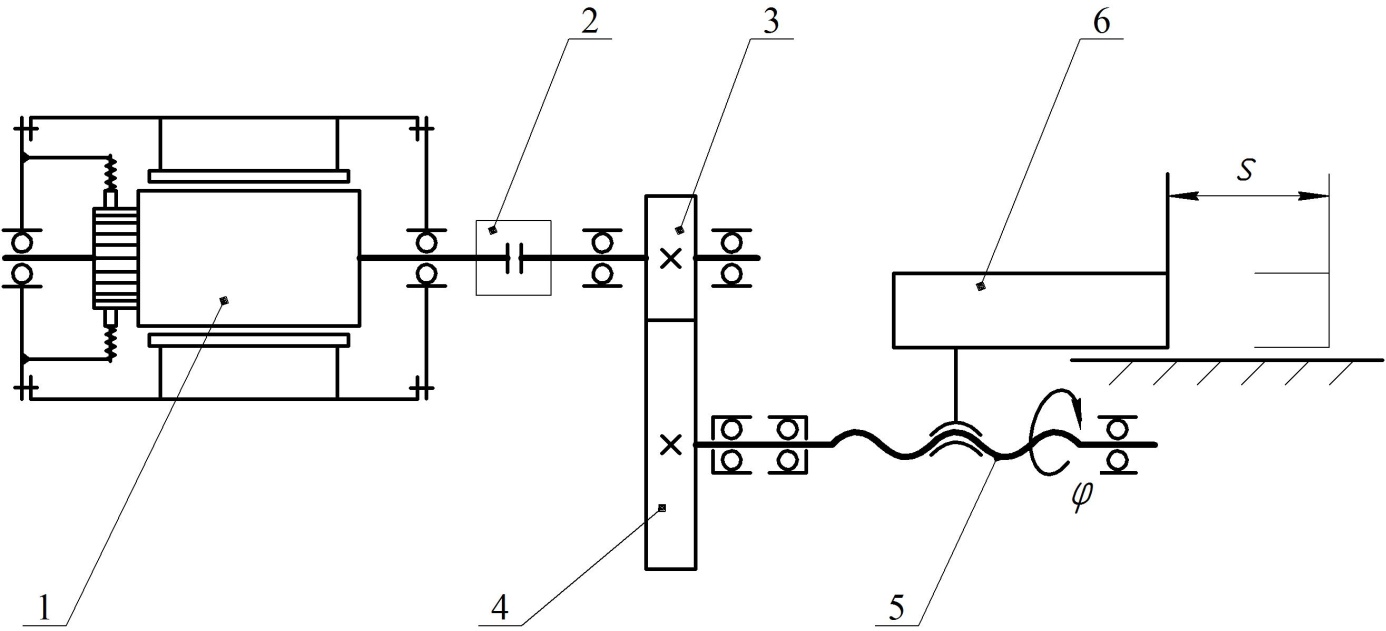
1 – ротор электродвигателя; 2 – соединительная муфта; 3 – шестерня с числом зубцов z 3; 4 – колесо с числом зубцов z 4; 5 – винтовой механизм;
6 – исполнительное звено – каретка
При быстром разгоне (разгон с большим ускорением) момент двигателя тратится, в основном, на преодоление инерции всех подвижных элементов

где J пр – приведенный к валу двигателя момент инерции системы;
e – угловое ускорение вала двигателя.
Приведенный к валу двигателя момент инерции механизма (без учета инерции валов, винта и зубчатых колес) будет равен
 (2.4)
(2.4)
где u 1 – передаточное число зубчатой пары 3-4, u 1 = z 4/ z 3;
u 2 – передаточное число пары винт-гайка, u 2 = φ /s;
φ– угол поворота винта;
s – перемещение каретки (гайки); при φ = 2πи однозаходном винте с шагом t: s = t, u 2 = 2p /t (рад/м);
m 6 – масса каретки;
J1 и J 2– моменты инерции ротора 1 двигателя и муфты 2 соответственно.
Понятия приведенный момент инерции J пр и приведенная масса m пр - одни из главных в механике.Ониопределяются исходя из баланса кинетической энергии звеньев механизма. Например, если звено движется поступательно, его кинетическая энергия Т п = mV 2/2. Кинетическая энергия этого звена, приведенная к вращающемуся валу, Т в = J прw2/2. Приравнивая Т в = Т п, получим J пр = mV 2/w2= m/u 2, где u - передаточное отношение механизма, передающего движение от звена, движущегося поступательно, к вращающемуся валу.
Анализируя формулу (2.4), видим, что хотя масса ротора много меньше массы каретки, ротор (по сравнению с кареткой) может оказывать большее влияние на приведенный момент инерции механизма.
|
|
В быстродействующих устройствах с большим угловым ускорением ε приведенный момент инерции J пр должен быть сведен к минимуму, что достигается, в частности, применением малоинерционных двигателей.
Двигатели с малым моментом инерции ротора строятся по трем основным схемам (рис. 2.9): с цилиндрическим полым ротором, с дисковым ротором, с ротором малого диаметра.
Ротор в виде тонкостенной цилиндрической оболочки 1 (рис. 2.9, а) изготавливается, например, из стеклопластика, провода обмотки ротора заливают в тело оболочки. Внутренний магнитопровод 2 неподвижен (в отличие от вращающегося магнитопровода 6 на рис. 2.6, б). Вследствие малой массы ротор имеет небольшой момент инерции.
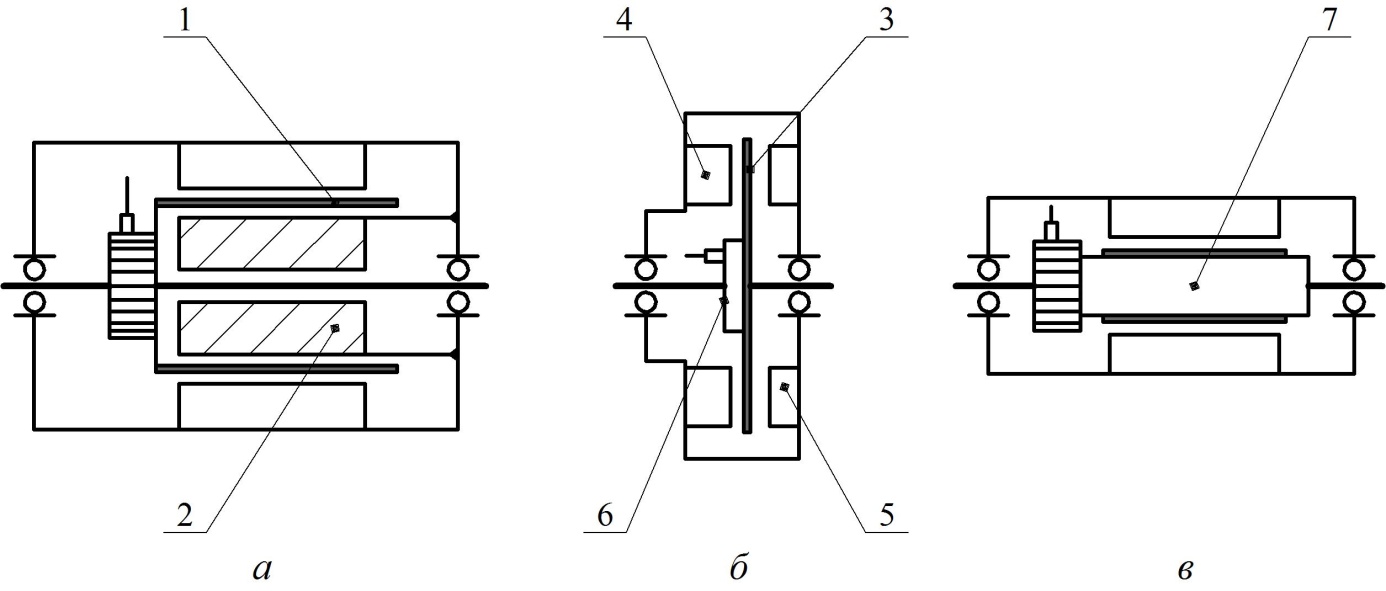
Рис. 2.9. Малоинерционные двигатели:
а – двигатель с цилиндрическим полым ротором; б – двигатель с дисковым ротором; в – двигатель с ротором малого диаметра
1 – оболочка; 2 – неподвижный магнитопровод; 3, 7 – ротор; 4 – магниты;
5 – подвижный магнитопровод; 6 – вращающийся магнитопровод
В двигателе с дисковым ротором (рис. 2.9, б) ротор 3 выполнен в виде тонкого диска. Провода обмоток заложены внутри диска. Все магниты 4 и магнитопровод 5 неподвижны. Коллектор 6 – торцевого типа. Ротор легкий, с малым моментом инерции.
В двигателе с ротором малого диаметра (рис. 2.9, в) ротор 7 выполнен в виде вала, на поверхности которого закреплены проводники обмотки. Вследствие малого диаметра ротор имеет небольшой момент инерции.