Содержание
Введение. 3
1 Краткая история системы машинного зрения. 4
2 Как работает машинное зрение. 6
3 Задачи машинного зрения и области его применения. 9
4 Слабые и сильные стороны системы машинного зрения. 14
Заключение. 17
Список использованных источников. 18
Введение
Основную часть информации о внешнем мире человек получает по зрительному каналу и далее весьма эффективно обрабатывает полученную информацию при помощи аппарата анализа и интерпретации визуальной информации. Поэтому встает вопрос о возможности машинной реализации данного процесса.
За счет возрастания сложности решаемых научно-технических задач, автоматическая обработка и анализ визуальной информации становятся все более актуальными вопросами. Данные технологии используются в весьма востребованных областях науки и техники, таких как автоматизация процессов, повышение производительности, повышение качества выпускаемых изделий, контроль производственного оборудования, интеллектуальные робототехнические комплексы, системы управления движущимися аппаратами, биомедицинские исследования и множество других.
Кроме того, можно сказать, что успех современного бизнеса основывается главным образом на качестве предлагаемой продукции. А для его обеспечения, если говорить о производстве материальных вещей, требуется визуальный контроль [3].
Краткая история системы машинного зрения
Машинное зрение — это научное направление в области искусственного интеллекта, в частности робототехники, и связанные с ним технологии получения изображений объектов реального мира, их обработки и использования полученных данных для решения разного рода прикладных задач без участия (полного или частичного) человека [7].
Как самостоятельная дисциплина машинное зрение зародилось в начале 50-х годов прошлого века. В 51 году Джон фон Нейман предложил анализировать микроснимки при помощи компьютеров путем сравнения яркости соседних частей изображения. В 60-е годы начались исследования в области распознавания м и рукописного текста. Тогда же были сделаны первые попытки моделирования нейронной сети. Первым устройством способным распознавать буквы стала разработка Фрэнка Розенблатта персептрон (от perception - восприятие). А в 70-х годах ученые стали изучать зрительную систему человека с целью её формализации и реализации в виде алгоритмов. Такой подход был призван позволить распознавать объекты на изображениях [4].
Лавренсе Робертс, аспирант МТИ, через 10 лет выдвинул концепцию машинного построения трехмерных образов объектов на основе анализа их двумерных изображений. А в 1979 г. профессор Ганс-Хельмут Нагель из Гамбургского университета заложил основы теории анализа динамических сцен, позволяющей распознавать движущиеся объекты в видеопотоке. На ее базе в конце 80-х годов были созданы роботы, способные более-менее удовлетворительно оценивать окружающий мир и самостоятельно выполнять действия в естественной среде. В середине 90-х годов появились первые коммерческие системы автоматической навигации автомобилей. Эффективные средства компьютерного анализа движений удалось разработать в конце XX века, а год назад на рынок были выпущены первые достаточно надежные корпоративные системы распознавания лиц. Это, пожалуй, наиболее важные вехи в развитии системы машинного зрения [3].
Как работает машинное зрение
Система машинного зрения (далее СМЗ) использует одну или несколько видеокамер, устройство аналого-цифрового преобразования (АЦП) и цифровой обработки сигналов (ЦОС). Полученные данные поступают в компьютер или робота-контроллера. По степени сложности машинное зрение похоже на распознавание голоса.
Двумя важными характеристиками в любой такой системе являются чувствительность и разрешение. Чувствительность – это способность машины видеть в тусклом свете или различать слабые импульсы в спектре невидимых длин волн. Разрешение – это степень, с которой система различает объекты. Чувствительность и разрешение являются взаимозависимыми параметрами. При увеличении чувствительности, разрешение, как правило, уменьшается, и наоборот, хотя все остальные факторы обычно остаются при этом неизменными.
Человеческие глаза могут различать электромагнитные волны с длиной волны, находящейся в диапазоне от 390 до 770 нанометров. У видеокамер этот диапазон значительно шире, чем это. Например, есть системы машинного зрения, которые могут видеть в инфракрасной, ультрафиолетовой и рентгеновской областях длин волн [6].
На схеме (рис. 1) представлен пример использования машинного зрения в производстве при сортировке продукции.
Цифровая камера снимает изображение и передает его в компьютер. Специальное ПО анализирует данные изображения и ставит задачи оборудованию.
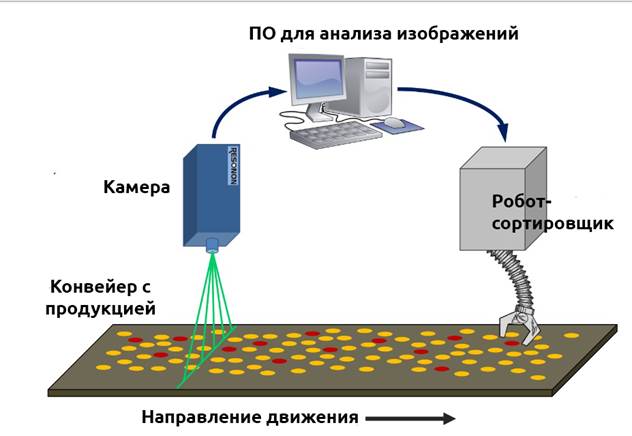
Рисунок 1 – Применение машинного зрения в производстве
В зависимости от задачи для каждой системы пишут алгоритмы распознавания. В зависимости от задачи для каждой системы пишут алгоритмы распознавания. Вот помидор едет по конвейеру, и система анализирует его цвета, формы, размеры, пятна, чтобы отсортировать гнилые и неспелые. В алгоритмы заложены характеристики правильных помидоров.
Характеристики объекта можно заложить в алгоритм двумя способами:
1. Описать с помощью математических формул
2. Обучить нейронную сеть на базе изображений
Для сортировщика помидоров достаточно математических формул. А вот для распознавания номерных знаков на улице нужна большая база данных, чтобы обучить нейросеть. Алгоритм будет работать только в тех условиях и при тех параметрах, при которых собрана база изображений.
Для правильной работы машинного зрения нужна устойчивая среда: подходящее освещение, предсказуемое расположение объектов, точное понимание положения камеры и её характеристик.
Часто в системах машинного зрения используют дополнительные устройства. В первую очередь это датчики: датчики движения, инфракрасные, фотоэлектрические датчики и т. д. Они позволяют получать больше информации об объекте съемки [5].