Роботы в медицине (страница 3)
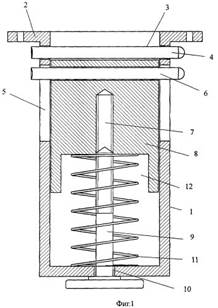
Лазерный параллелометр для построения протетической плоскости
Изобретение относится к медицине, а именно к ортопедической стоматологии, и может быть использовано при конструировании зубных рядов в полных съемных протезах. Параллелометр для построения протетической плоскости содержит фланец для крепления к держателю, выполненный на наружном стакане, снабженном противолежащими отверстиями для размещения неподвижного лазерного модуля и противолежащими вертикальными прорезями, в котором соосно установлен внутренний подвижный цилиндр с лазерным модулем. Лазерный модуль формирует линию проекции камперовской горизонтали и прикреплен с возможностью осевого перемещения в вертикальных прорезях и формирования параллельной линии проекции протетической плоскости. Внутренний подвижный цилиндр снабжен регулировочным винтом. Использование изобретения позволяет быстро, комфортно и с повышенной точностью определить протетическкую (окклюзионную) плоскость относительно камперовской горизонтали, при протезировании пациентов съемными пластиночными протезами. 1 з.п. ф-лы, 4 ил.
https://findpatent.ru/patent/236/2360643.html
©, 2012-2019
Многоосевой управляемый манипулятор и использующий его рентгеновский аппарат
Изобретения могут быть использованы в различных областях при обработке объектов с помощью управляемых манипуляторов, в частности в медицине при рентгеновском обследовании пациента. Многоосевой управляемый манипулятор содержит взаимосвязанные опорные рычаги, которые приводятся в движение исполнительными механизмами. В результате выходной конец рычажной системы перемещается в пространстве относительно трех взаимно перпендикулярных осей. Система управления исполнительными механизмами включает миниатюрную модель манипулятора с позиционными датчиками и миниатюрную модель обрабатываемого объекта. Масштабное отношение модели объекта и самого объекта больше масштабного отношения модели манипулятора и манипулятора. В другом варианте манипулятора масштабное отношение модели манипулятора и манипулятора превышает масштабное отношение модели объекта и объекта. Система управления многоосевым манипулятором рентгеновского аппарата включает миниатюрные модели манипулятора и опоры объекта, положение которых идентично положению самих манипулятора и опоры. 3 с. и 8 з.п.ф-лы, 1 ил.
https://findpatent.ru/patent/210/2108905.html
©, 2012-2019
Артикулятор
Изобретение предназначено для использования в медицине, а именно в ортопедической, хирургической стоматологии, а также при планировании и подготовке челюстно-лицевых операций и ортопедического лечения. Артикулятор содержит нижнюю раму, конструктивно объединенную с двумя боковыми стойками и перекладиной и имеющую в передней части резцовую площадку, и подвижную верхнюю раму, соединенную с двумя суставными узлами, подвижно закрепленными в верхних частях обеих стоек и обеспечивающих поворот и перемещения верхней рамы относительно нижней. Верхняя рама снабжена указателем Франкфуртской горизонтали и резцовым штифтом с мезингером, контактирующим с резцовой площадкой на нижней раме. На обеих рамах располагаются съемные монтажные платы. Артикулятор снабжен суставной осью, на которой закреплена верхняя рама и на обоих концах которой размещены суставные узлы в виде кулачков, расположенных перпендикулярно суставной оси со смещением их центров относительно ее осевой линии и имеющих на внешней стороне прорези-пазы с углублениями, воспроизводящими колею суставного пути, по которой ходят штифты полуосей, имеющих кольцо с накаткой и шток с резьбой, заканчивающийся упомянутым штифтом, и расположенных с возможностью вращения в верхних частях обеих стоек. На суставной оси расположен возвратный механизм с подпружиненным штоком, скользящим по полукруглой направляющей в середине перекладины, имеющей опорный винт, контактирующий с конической выемкой опорной площадки, закрепленной на возвратном механизме, артикулятор также снабжен двумя дополнительными опорами: откидывающейся на перекладине и верхней на верхней раме. Технический результат - повышение жесткости фиксации элементов суставного узла в режиме "окклюзатор", повышение обзорности и удобства работы с прибором, что обеспечивает изготовление высококачественных зубных протезов. 7 ил.
https://findpatent.ru/patent/223/2233642.html
©, 2012-2019
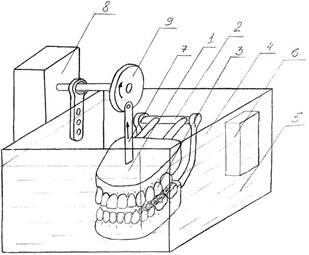
Модель для оценки эффективности детальных реставраций в эксперименте
Изобретение относится к медицине, а именно к ортопедической и терапевтической стоматологии, и может быть использовано для исследования в эксперименте эффективности дентальных реставраций. Устройство для оценки эффективности дентальных реставраций в эксперименте содержит электромотор, емкость, расположенный в емкости термостат с термоэлементом, окклюдатор с моделями челюстей, имеющих зубные ряды из естественных ранее удаленных зубов, закрепленных в самотвердеющей пластмассе, упругий рычажок, установленный с возможностью оказания давления верхней челюсти на нижнюю, и диск, соединенный с рычажком посредством жестко закрепленного на нем развальцованного стержня. Диск соединен с электомотором для имитации движений височно-челюстного сустава, а рычажок соединен с диском с возможностью вражения, причем окклюдатор размещен в емкости с раствором, имеющим адекватную ротовой полости рН. Технический результат изобретения заключается в возможности оценки эффективности новых материалов, методик и устройств для пломбирования кариозных дефектов и восстановления коронковой части разрушенного зуба, максимально повторяющего анатомию челюстей и имитирующее движение височно-челюстного сустава в естественных условиях. 1 ил.
https://findpatent.ru/patent/227/2279863.html
©, 2012-2019
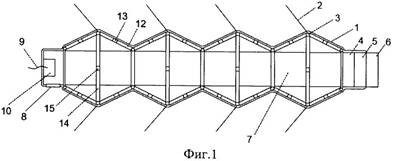
Медицинский микроробот
Изобретение относится к медицинским приборам и предназначено для транспортировки лекарственных веществ в трудно доступные места живого организма с высокой эффективностью. Устройство содержит гибкий чехол корпуса 1, гибкие жгутики 2 гребного механизма, пьезоэлектрические поворотные электроприводы 3 гребного механизма, блок питания 4, блок управления 5, блок получения и передачи изображения 6, контейнер для транспортировки лекарственных веществ 7 с управляемой заслонкой 8, жгутик 9 движителя с пьезоэлектрическим двигателем 10, триподные механизмы 11 со штангами 12 и актуаторами 13 на линейных электроприводах, штанги 14 платформ триподов 11 с актуаторами 15 на линейных электроприводах. Технический результат состоит в повышении эффективности доставки лекарственных препаратов в труднодоступные участки организма за счет повышения грузоподъемности и гибкости конструкции. 2 ил.
https://findpatent.ru/patent/246/2469752.html
©, 2012-2019