Большинство промышленных САУ являтся многоконтурными, поскольку помимо выходной координаты технологические процессы и производства предъявляют жесткие требования к качеству регулирования и ограничению остальных (промежуточных) координат объектов управления. В практике проектирования одномерных многоконтурных САУ хорошо себя зарекомендовал принцип подчиненного регулирования координат объектов управления с последовательной коррекцией их динамических свойств.
Принцип подчиненного регулирования координат
Объекта управления
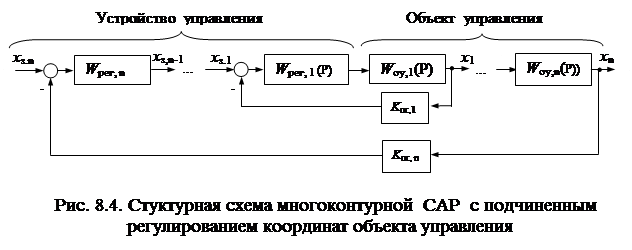
Стуктурная схема многоконтурной САР с подчиненным регулированием координат объекта управления приведена на рис. 8.4.
 |
Основные положения принципа подчиненного регулирования координат:
1. Объект управления представляется в виде последовательно соединенных простейших линейных динамических звеньев (апериодических первого-второго порядка, интегральных и колебательных второго порядка) – W оу,1(P), W оу,2(P), …, W оу,n(P); порядок объекта управления (n) принимается равным числу этих звеньев;
2. Устройство управления представляют в виде последовательно соединенных регуляторов класса “вход/выход”; число регуляторов и соответственно контуров регулирования принимается равным порядку объекта управления (количеству контролируемых переменных);
3. Ограничение координат объекта управления осуществляется ограничением задающих воздействий соответствующих контуров регулирования;
4. Синтез САУ начинается с младшего (внутреннего) контура регулирования; передаточная функция W оу,1(P) части объекта управления, охваченной внутренней обратной связью, содержит фильтр с эквивалентной некомпенсированной постоянной времени T m, определяющей такие важнейшие свойства системы, как ее быстродействие, точность и помехозащищенность.
|
|
В многоконтурных электромеханических системах подчиненного регулирования координат наиболее распространены настройки отдельных контуров на технический (модульный) и симметричный оптимумы.
Настройка на технический оптимум.
При настройке контуров регулирования на технический оптимум (ТО) передаточные функции замкнутых контуров регулирования представляют в виде фильтров Баттерворта второго порядка:
 ,
,
где i = 1… n.
Передаточная функция оптимального регулятора в этом случае
имеет вид:

Переходный процесс в младшем контуре регулирования
|

Настройка на симметричный оптимум.
При настройке контуров регулирования многоконтурной САУ на симметричный оптимум их передаточные функции представляют в виде оптимальных звеньев третьего порядка. Для этого передаточные функции замкнутых контуров регулирования, настроенных на технический оптимум (см. выше), и соответствующих регуляторов умножают на изодромное звено вида

где i – номер синтезируемого контура регулирования, i = 1,…,n.
Такая настройка контуров регулирования обеспечивает астатизм в САУ (теоретически нулевую статическую ошибку регулирования выходной координаты), однако отработка скачкообразных задающих воздействий сопровождается высоким перерегулированием, достигающим 56%. Для снижения перерегулирования выходной координаты на входе i –го
|
|
|

Типовая методика синтеза контуров регулирования, обеспечивающих настройку на технический (ТО) и симметричный (СО) оптимумы, приведена ниже.