3.1. В текущей номинации участники команд проходят через следующие этапы:
− размещение участников команд на рабочих местах (15 минут);
− получение инструкций к выполнению заданий (10 минут);
− период сборки модели и выполнения заданий (60 минут);
− подсчёт итоговых баллов в номинации (30 минут).
3.2. Работа участников над заданием осуществляется следующим способом:
− объявляется начало старта. Участники приступают к сборке модели по опорной схеме в задании;
− участник заканчивает сборку модели и приступает к программированию конструкции по заданию;
− завершается работа над сборкой модели и её программированием. Участник вызывает экспертов, которые проверяют и оценивают результат, задавая необходимые вопросы по заданию и выставляя набранные командой баллы в протоколе;
− участникам может быть объявлено дополнительное задание по изменению конструкции и/или алгоритму поведения модели.
3.3. Задания на программирование могут включать в себя работу со всеми программными блоками.
Правила определения победителя
4.1. По окончании общего времени судьи суммируют набранные очки и формируют общий зачёт команды (эксперты оставляют за собой право присвоить команде дополнительные баллы за оригинальность решения).
4.2. Победителем в номинации объявляется команда, набравшая наибольшее количество баллов.
Приложение 2
Робогонки
Описание задания
1.1. За минимальное время робот должен проехать от места старта до места финиша.
1.2. Команда состоит из 1-2 учащихся 1-4 классов.
Робот
2.1. Максимальный размер робота 150 х150 мм. Во время попытки робот не может менять свои размеры.
2.2. Робот должен быть собран на базе образовательного конструктора Lego Wedo 2.0. В конструкции обязательно использование 1 мотора и 1 датчика расстояния.
Условия и схема проведения
3.1. На стартовой позиции робот устанавливается перед линией старта, никакая его часть не выступает за стартовую линию.
3.2. Роботу необходимо доехать от стартовой зоны до стенки, не разворачиваясь (т.е. задним ходом) заехать в финишный коридор и остановиться в нем так, чтобы робот по проекции полностью находился в пределах коридора.
3.3. Расстояние от старта до стенки и от стенки до финишного коридора будет известно в день Турнира до периода отладки.
3.4. Ширина финишного коридора 200 мм.
3.5. Высота стенки 100 мм, цвет стенки – белый.
3.6. При подъезде к стенке робот ОБЯЗАТЕЛЬНО должен хотя бы частично пересечь тонкую серую линию.
3.7. Максимальное время выполнения попытки 60 секунд.
3.8. Количество попыток – 2. В итоговый протокол заносится лучшая попытка.
Баллы
4.1. Баллы за задание:
− Робот доехал до стенки, не дотронулся ее и хотя бы частично пересек серую линию – 5 баллов;
− Робот полностью по проекции остановился в финишном коридоре 10 баллов;
− Робот частично по проекции остановился в финишном коридоре 5 баллов.
− Выполнение дополнительного задания 5 баллов.
4.2. Штрафные баллы:
− Робот дотронулся стенки – минус 5 баллов;
− Робот хотя бы частично не пересек серую линию – минус 5 баллов;
− Робот не остановился в финишном коридоре – 0 баллов;
− Участник во время попытки дотронулся до робота – минус 15 баллов.
Правила определения победителя
5.1. В зачет принимается лучшая попытка.
5.2. Финиш робота фиксируется, когда робот заедет в финишный коридор и остановится в нем.
5.3. Победителем будет объявлена команда, получившая наибольшее количество баллов.
5.4. Если таких команд несколько, то победителем объявляется команда, потратившая на преодоление дистанции наименьшее время.
Приложение 3
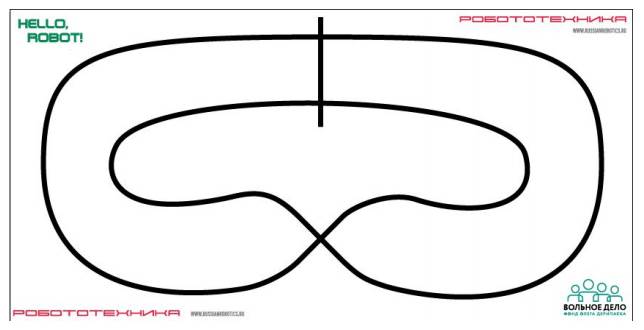
Шорт-трек
Условия состязания
1.1. За минимальное время робот должен проехать по линии N полных кругов (количество кругов определяет главный судья соревнований в день соревнований). Движение осуществляется в направлении по часовой стрелке. Круг – полный проезд роботом трассы, с возвращением в место старта, пересекая при этом линию старта-финиша.
1.2. Команда состоит из 1-2 учащихся 5-7 классов.
Игровое поле
2.1. Размеры игрового поля 1200*2400 мм.
2.2. Поле представляет собой белое основание с черной линией траектории.
2.3. Линии на поле могут быть прямыми, дугообразными, пересекаться под прямым углом.
2.4. Толщина черной линии 18-25 мм.
Робот
3.1.Максимальные размеры робота 200*200*200 мм.
3.2. Во время заезда робот не может изменять свои размеры.
3.3. Робот должен быть автономным.
3.4. В номинации Шорт-трек Lego сборка робота осуществляется на месте в день проведения соревнования. Робот должен быть сконструирован из образовательных конструкторов: Lego Mindstorms, Lego Spike, Lego Robot Inventor.
3.4.1. В номинации Шорт-трек Lego допустимо использование колес базового набора: Lego Mindstorms, Lego Spike, Lego Robot Inventor и любых других колес фирмы Lego.
3.4.2. На сборку робота отводится не менее чем 60 минут. Точное время сборки и отладки будет известно в день проведения соревнования.
3.5. В номинации Шорт-трек Arduino робот должен быть собран на базе платформы Arduino (робот должен быть собран заранее).
3.6. На стартовой позиции робот устанавливается перед линией старта, никакая его часть не выступает за стартовую линию.
3.7. Движение робота начинается после команды судьи.