План дополнительных занятий, II-й семестр
Курс – 20 часов, т.е. 8 занятий по 2 часа астрономических.
- Теория дискретных систем. Переход от непрерывного представления системы к дискретному. Решетчатая функция. Дискретное преобразование.
- Дискретные системы. Типовая структурная схема дискретной системы. Функции элементов дискретных систем. Виды модуляций.
- Теория нелинейных систем. Методы исследования нелинейных систем. Автоколебания.
- Типовые нелинейные звенья. Реакция нелинейного звена на входное воздействие.
- Синтез линейных систем. Методы и задачи синтеза. Графический способ синтеза с помощью построения ЛАЧХ.
- Современные методы синтеза систем. Типовые законы регулирования. Развитие автоматизации в промышленности, обзор программных продуктов для синтеза.
- Simulink как средство анализа систем. Основные элементы, возможности.
- Итоговый тест.
Теория дискретных систем. Переход от непрерывного представления системы к дискретному. Решетчатая функция. Дискретное преобразование
В структуре управления можно выделить несколько уровней (рисунок 1).

Рисунок 1 – Многоуровневая структура управления
Раньше многие задачи управления объектами выполнялись вручную, что до сих пор имеет место на некоторых предприятиях. Приблизительно до 1960 года автоматическое управление технологическими объектами осуществлялось с помощью аналоговых электрических, пневматических или гидравлических регуляторов. В 1975 году начали выпускать микропроцессоры для решения задач контроля и управления объектами на 8-16 регулируемых переменных.
Система управления называется дискретной, если она содержит дискретный элемент. Элемент называется дискретным, если его выходной сигнал квантован по времени или по уровню. Говорят, что сигнал квантован по времени, если он представляет собой последовательность импульсов, и квантован по уровню, если он принимает дискретные значения, т.е. значения, кратные некоторой минимальной величине, называемой уровнем квантования или квантом.
Преимущества дискретных систем.
некоторые из преимуществ импульсных и цифровых систем:
повышенная чувствительность,
бОльшая надежность,
отсутствие дрейфа,
более высокая устойчивость к шумам и возмущениям,
меньше масса и габариты,
удобство программирования.
Программа цифрового регулятора может быть изменена в соответствии с требованием проектировщика или приспособлена к характеристикам объекта без каких-либо изменений в аппаратной части.
Теория линейных дискретных систем
Как известно, математическая модель непрерывной системы описывается дифференциальным уравнением. Дискретные же системы описываются разностным уравнением.
При рассмотрении разностных уравнений важную роль играет z-преобразование. Но прежде чем приступить к изучению этого преобразования, познакомимся с классом дискретных функций, называемых решетчатыми функциями.
Дискретная функция x(t) по определению есть функция, которая определена в дискретные моменты времени t = l T (l = 0,1, 2,...). Далее дискретную функцию будем записывать в виде x[ l T], используя t как непрерывную переменную. В теории дискретных систем рассматривают особый тип дискретных функций, называемых решетчатыми функциями. Решетчатая функция x[ l T] характеризуется тем, что она определяется непрерывной
функцией x(t) и принимает ее значения в моменты t = l T (I = 0,1, 2,...).
Таким образом если интервал квантования Т задан, то по функции x(t) решетчатая функция x[ l T] определяется однозначно. Обратное предположение не справедливо: по решетчатой функции x[ l T] функцию x(t) без дополнительных сведений о поведении функции x(t) в интервалах между моментами времени t = l T восстановить нельзя.
Разности решетчатой функции.
Первая разность – характеризует скорость изменения решетчатой функции, что аналогично первой производной непрерывной функции:
- прямая разность 
- обратная разность 
В импульсных системах обычно используют прямую разность, в цифровых – обратную.
Вторая разность (прямая)  .
.
z-Преобразование.
z-Преобразование является одним из математических методов, разработанных для анализа и проектирования дискретных систем. Аппарат z-преобразования играет для цифровых систем ту же роль, что и преобразование Лапласа для непрерывных систем.
Типовая структурная схема дискретной системы:
|

Идеальный квантователь проводит квантование по времени и АИМ, а фиксатор формирует выходной сигнал.
Уравнение идеального квантователя во временной области можно записать:
 .
.
Применив преобразование Лапласа, получим:

(вообще  , но у нас есть сдвиг).
, но у нас есть сдвиг).
По предложению Цыпкина Якова Залмановича приняли обозначение  , тогда
, тогда
 ,
,
но удобнее использовать z-преобразование, т.е.  , тогда
, тогда
 .
.

Удобно пользоваться таблицей z-изображений, в которой соотносятся изображение Лапласа непрерывного сигнала, его решетчатая функция и z-изображение.

При исследовании дискретных систем, так же как и при исследовании непрерывных систем, удобно пользоваться передаточными функциями.
Типовая структурная схема дискретной системы:

Порядок определения дискретной передаточной функции:
- передаточную функцию
 (ПНЧ системы) нужно представить в виде суммы элементарных дробей:
(ПНЧ системы) нужно представить в виде суммы элементарных дробей:
 ;
;
- для каждого элементарного слагаемого определяем импульсную переходную функцию (функцию веса):
 ;
;
- переходим к решетчатой функции:
 ;
;
- находим z-преобразование для элементарной дроби:
 ;
;
- определяем дискретную передаточную функцию всей системы:

Пример.
Соответствие s и z-плоскостей.
Изучение соответствия между s и z-плоскостями при z-преобразовании является весьма важным, т.к. проектирование систем зачастую основывается на анализе расположения корней характеристического уравнения системы на плоскости.
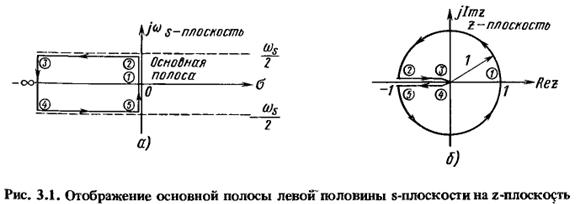
Для постоянного затухания  на s-плоскости соответствующая кривая на z-плоскости представляет собой окружность с радиусом
на s-плоскости соответствующая кривая на z-плоскости представляет собой окружность с радиусом  с центром в начале координат.
с центром в начале координат.


Для любой фиксированной частоты  на s-плоскости соответствующая линия на z-плоскости имеет вид луча, исходящего из начала координат под углом
на s-плоскости соответствующая линия на z-плоскости имеет вид луча, исходящего из начала координат под углом  .
.

>> w=tf([5],[1 4 7])
Transfer function:
-------------
s^2 + 4 s + 7
>> pole(w)
ans =
-2.0000 + 1.7321i
-2.0000 - 1.7321i
>> wz=c2d(w,0.1)
Transfer function:
0.02185 z + 0.01912
----------------------
z^2 - 1.613 z + 0.6703
Sampling time: 0.1
>> wz=c2d(w,0.01)
Transfer function:
0.0002467 z + 0.0002434
-----------------------
z^2 - 1.96 z + 0.9608
Sampling time: 0.01


Т=0.1 радиус  угол
угол 
Т=0.01 радиус  угол
угол 
При использовании метода z-преобразования необходимо учитывать следующие ограничения:
- период квантования должен быть много меньше определяющей постоянной времени системы;
 ,
,
- z-преобразование выходного сигнала дискретной системы определяет значения непрерывной функции только в моменты квантования;
- при анализе системы методом z-преобразования следует учитывать, что порядок знаменателя передаточной функции должен быть больше порядка числителя, в противном случае результаты будут ошибочными.