Таблица 2.10 – Сравнительная таблица для разных типов регуляторов
| Регулятор/ Параметр | Перерегулирование σ, % | Время переходного процесса tп, с | Затухание ξ, % | Число колебаний переходного процесса n |
| ПИ-регулятор | ||||
| ПИД-регулятор |
Выбор регулятора по частотным показателям качества. Для системы с полученными параметрами при помощи функции критерия Найквиста строятся годографы АФЧХ (рисунки 2.21 – 2.22), определяются запасы устойчивости по фазе γ и по модулю а для каждой модели регуляторов [8].

Рисунок 2.21 – АФЧХ ПИ-регулятора
Запас устойчивости по модулю а и частота среза  для ПИ-регулятора определяются по формулам (2.37) и (2.38) соответственно:
для ПИ-регулятора определяются по формулам (2.37) и (2.38) соответственно:


где L – расстояние от начала координат до точки пересечения АФЧХ;
 – запас по фазе (определяется по АФЧХ регулятора);
– запас по фазе (определяется по АФЧХ регулятора);
Тоб – постоянная времени.


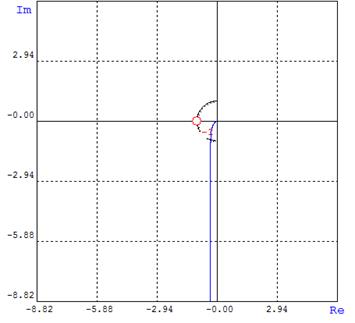
Рисунок 2.22 – АФЧХ ПИД-регулятора
Используя формулы (2.37) и (2.38) рассчитывается запас устойчивости по модулю а и частота среза для ПИД-регулятора.

В таблице 2.5 приведены частотные показатели качества регуляторов.
Таблица 2.11 – Сравнительная таблица для разных моделей регуляторов
| Регулятор/Параметр | Запас по модулю а | Запас по фазе γ, ° | Частота среза ωср, рад/с |
| ПИ-регулятор ПИД-регулятор | 33,3 | 0,029 | |
| 0,023 |
Вывод: по результатам двух сравнительных таблиц (табл. 2.10 и табл. 2.11) выбирается ПИД-регулятор как наилучший, который и будет использоваться при дальнейшем исследовании САР.
Изучение поведения системы при воздействии помех(f)
На вход САР с выбранными ранее параметрами объекта и регулятора подается импульсное воздействие, соответствующее системе (2.39):

где f(t) – импульсное воздействие;
а – амплитуда, a = 1;
t1 – время, t1 = 75.
Поведение системы при воздействии помех(f) представлено на рисунке 2.23.

Рисунок 2.23 – Поведение системы при воздействии помех(f)
Из графика можно сделать вывод, что система является помехоустойчивой, т.к. она ликвидирует помеху.
Изучение поведения системы при возмущении по каналу измерения (z)
На вход САР с выбранными ранее параметрами объекта и регулятора подается возмущающее воздействие в виде системы (2.40):

где f(t) – возмущающее воздействие;
а – амплитуда, a = 0,025;
t1 – время, t = 10.
На рисунке 2.24 изображено поведение системы при возмущении по каналу измерения (z).

Рисунок 2.24 – Поведение системы при возмущении по каналу измерения (z)
Из графика видно, что система является устойчивой по каналу измерения z, так как переходный процесс входит в установившееся состояние.
Изучение поведения системы при возмущении по нагрузке (g)
На вход САР с выбранными ранее параметрами объекта и регулятора подается возмущающее воздействие в виде системы (2.41):

где f(t) – возмущающее воздействие;
а – амплитуда, a = 0, 5;
t1 – время, t = 10.
Рисунок 2.25 – Поведение системы при возмущении по нагрузке (g).
Вывод:из графика видно, что в первоначальный момент времени система реагирует на возмущение, но затем входит в установившееся состояние, поэтому система устойчива при возмущении по нагрузке g.