МЕТАЛЛОРЕЖУЩИЕ СТАНКИ
УЧЕБНО-МЕТОДИЧЕСКИЙ КОМПЛЕКС
Блок контроля освоения дисциплины
Задание на курсовую работу
и методические указания к ее выполнению
Машиностроительно-технологический институт
Специальность
151001.65 – технология машиностроения
Специализации:
151001.65-01 – технология автоматизированного производства
151001.65-03 – общая технология авторемонтного производства
151001.65-27 – технология, промышленный менеджмент и маркетинг в машиностроении
Направление подготовки бакалавра
150900.62 – технология, оборудование и автоматизация машиностроительных
производств
Санкт-Петербург
Издательство СЗТУ
2011
Утверждено редакционно-издательским советом университета
УДК 621.01-52(07)
Металлорежущие станки: учебно-методический комплекс (блок контроля освоения дисциплины: задание на курсовую работу и методические указания к ее выполнению) / сост.: В.В. Максаров, В.А. Денисов, А.Д. Халимоненко. – СПб.: Изд-во СЗТУ, 2011. – 102с.
Данная методическая разработка соответствует требованиям государственных образовательных стандартов высшего профессионального образования и содержит задание на курсовую работу и методические указания к его выполнению.
Методические указания к выполнению курсовой работы являются составной частью раздела «Блок контроля освоения дисциплины» учебно-методического комплекса.
Содержанием курсовой работы является расчет наладки токарного автомата по заданному технологическому процессу обработки детали.
Рассмотрено на заседании кафедры технологии машиностроения 29.12.10, одобрено учебно-методической комиссией машиностроительно-технологического института 29.12.10.
Рецензенты: кафедра технологии машиностроения СЗТУ (зав. кафедрой В.В. Максаров, д-р техн. наук, проф.), А.А. Сарвин, д-р техн. наук, проф., зав. кафедрой автоматизации производственных процессов СЗТУ.
Составители: В.В. Максаров, д-р техн. наук, проф.,
В.А. Денисов, канд. техн. наук, доц.,
А.Д. Халимоненко, канд. техн. наук, доц.
Ó Северо-Западный государственный заочный технический университет, 2011
1 Содержание работы
Курс «Металлорежущие станки» как дисциплина, формирующая специалиста в области технологии машиностроения, занимает в учебном плане по этой специальности одно из ведущих мест. Предметом курса являются универсальные станки, станки-автоматы и полуавтоматы, станки с ЧПУ, агрегатные и многоцелевые станки, оборудование для заготовительных операций. Одной из задач курса является знакомство с наладкой универсальных токарных автоматов – одношпиндельных токарных автоматов продольного точения, токарно-револьверных автоматов, горизонтальных многошпиндель-
ных автоматов, используемых на предприятиях в основном в условиях крупносерийного и массового производства.
Наладкой автомата называется совокупность всех работ по подготовке станка к изготовлению детали по заданному чертежу и ТУ. Основным техническим документом, по которому проводится наладка автомата, является карта наладки. Исходным материалом для составления карты наладки служит расчёт наладки. По результатам расчётов в карте наладки указывается вид заготовки, модель автомата, приводятся схемы технологического процесса обработки детали и расчётные данные для построения кулачков.
В качестве заготовки для автоматов используют холоднотянутые калиброванные прутки различного сечения: круглого, квадратного, шестигранного.
Автомат выбирают с учётом диаметра заготовки, допускаемой длины обработки, частоты вращения шпинделя, числа необходимых переходов и производительности процесса, требуемой точности обработки и шероховатости поверхности.
 |
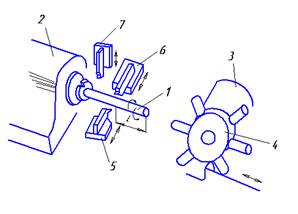
1 – пруток; 2 – шпиндельная бабка; 3 – шпиндель с цангой; 4 – стойка; 5 – люнетная втулка; 6 – вертикальный суппорт с резцом; 7 – балансир; 8 – дополнительное приспособление; 9 – распределительный вал; 10 - кулачки
Рисунок 1 – Схема работы автомата продольного точения
1 – пруток, 2 – шпиндельная бабка, 3 – продольный револьверный суппорт, 4 – револьверная головка, 5 – передний поперечный суппорт, 6 – передний поперечный суппорт, 7 – вертикальный суппорт
Рисунок 2 – Схема работы токарно-револьверного автомата

а – расположение шпинделей, б – обработка заготовки; I, II, III, IV – позиции шпинделей; 1 – шпиндельный блок; 2 – шпиндель; 3 – заготовка
Рисунок 3 – Схема работы горизонтального многошпиндельного токарного автомата
Например, на автоматах продольного точения (рисунок 1) обрабатывают детали с большим отношением длины к диаметру ( > 12), обеспечивая при этом высокую точность и качество обрабатываемых поверхностей: по 6…9 квалитетам точности по диаметральным поверхностям и по 7…11 квалитетам точности по длине с параметром шероховатости Ra = 1,63…0,63 мкм на станках различных классов точности. Это следует из того, что режущие инструменты станка всё время работают около люнета (конец прутка проходит через люнетную втулку), в результате чего исключается влияние переменности вылета прутка (пруток вместе со шпиндельной бабкой совершает ходы в продольном направлении) на деформацию детали, точность и качество обработки. Напротив, на токарно-револьверных (рисунок 2) и горизонтальных многошпиндельных токарных автоматах (рисунок 3) обрабатывают детали с небольшим отношением длины к диаметру ( < 5). В этом случае точность изготовленных деталей соответствует 8…11 квалитетам точности с параметром шероховатости обрабатываемых поверхностей Ra = 2,5…0,63 мкм. При больших вылетах прутка (больших отношениях ) силы резания, возникающие при обработке детали, вызывают её заметную деформацию, что снижает точность и качество обработки, так как на рассматриваемых станках обрабатываемая заготовка представляет собой консольную балку, нагруженную сосредоточенными силами (резания), действующими на различных расстояниях от заделки – торца цанги (пруток закрепляется в шпинделе в цанговом патроне).
> 12), обеспечивая при этом высокую точность и качество обрабатываемых поверхностей: по 6…9 квалитетам точности по диаметральным поверхностям и по 7…11 квалитетам точности по длине с параметром шероховатости Ra = 1,63…0,63 мкм на станках различных классов точности. Это следует из того, что режущие инструменты станка всё время работают около люнета (конец прутка проходит через люнетную втулку), в результате чего исключается влияние переменности вылета прутка (пруток вместе со шпиндельной бабкой совершает ходы в продольном направлении) на деформацию детали, точность и качество обработки. Напротив, на токарно-револьверных (рисунок 2) и горизонтальных многошпиндельных токарных автоматах (рисунок 3) обрабатывают детали с небольшим отношением длины к диаметру ( < 5). В этом случае точность изготовленных деталей соответствует 8…11 квалитетам точности с параметром шероховатости обрабатываемых поверхностей Ra = 2,5…0,63 мкм. При больших вылетах прутка (больших отношениях ) силы резания, возникающие при обработке детали, вызывают её заметную деформацию, что снижает точность и качество обработки, так как на рассматриваемых станках обрабатываемая заготовка представляет собой консольную балку, нагруженную сосредоточенными силами (резания), действующими на различных расстояниях от заделки – торца цанги (пруток закрепляется в шпинделе в цанговом патроне).
В заключение отметим, что при выборе автомата с учётом производительности процесса обработки, исходят из того, что наименее производительными станками являются автоматы продольного точения, а наиболее производительными – горизонтальные многошпиндельные автоматы.
Технологический процесс обработки детали представляют в виде последовательного ряда эскизов переходов обработки. На эскизах инструмент изображают в момент окончания рабочего хода. При этом указывают размеры, определяющие положение инструментов или их державок относительно шпинделя и других державок и длину хода инструмента.
Автоматический цикл станка складывается из автоматических циклов работы его рабочих органов: основных и вспомогательных. Основные рабочие органы совершают как рабочие, так и холостые ходы, вспомогательные – только холостые. Рабочим ходом считается ход, при котором происходит процесс резания. Все прочие ходы считаются холостыми.
На автоматах продольного точения (рисунок 1) холостые ходы включают отвод и подвод режущего инструмента, отвод и подвод шпиндельной бабки, зажим и разжим цанги; на токарно-револьверных автоматах (рисунок 2) – подачу и зажим материала, подвод и отвод режущего инструмента, поворот револьверной головки, переключение скорости шпинделя; на горизонтальных многошпиндельных автоматах (рисунок 3) – подачу и зажим материала, поворот блока шпинделей, подвод и отвод режущего инструмента.
Цикл работы автомата задаётся кулачками распределительного вала (РВ), рассчитанными и настроенными на данную деталь. Готовую деталь получают за один оборот РВ.
В токарных автоматах в основном применяют дисковые и цилиндрические кулачки. Профиль кулачка станка-автомата состоит из ряда участков. Характер профиля зависит от назначения кулачка. Если кулачок осуществляет перемещение основного рабочего органа, то его профиль обычно состоит из участков быстрого подвода, рабочего хода, быстрого отвода и выстоя рабочего органа. Если кулачок осуществляет перемещение вспомогательного рабочего органа, то в этом случае участок рабочего хода отсутствует, и все перемещения являются холостыми.
Расчётными данными для построения участков профиля дисковых кулачков являются начальный  и конечный
и конечный  радиус-векторы участков, а для цилиндрических кулачков - координаты крайних точек участков профиля в направлении оси вращения кулачка. Для дисковых кулачков участки рабочих ходов очерчивают по спирали Архимеда, для цилиндрических кулачков – по прямой. Участки холостых ходов очерчивают либо по шаблонам, прилагаемым к паспорту станка, либо по прямой линии.
радиус-векторы участков, а для цилиндрических кулачков - координаты крайних точек участков профиля в направлении оси вращения кулачка. Для дисковых кулачков участки рабочих ходов очерчивают по спирали Архимеда, для цилиндрических кулачков – по прямой. Участки холостых ходов очерчивают либо по шаблонам, прилагаемым к паспорту станка, либо по прямой линии.
Для передачи движения от кулачков к рабочим органам применяют кулачковые механизмы. В простейшем варианте кулач- ковый механизм представляет собой качающийся или поступа- тельно движущийся толкатель с приводом от кулачка, одновременно выполняющий функцию рабочего органа. В более сложных механизмах между толкателем и рабочим органом располагают рычажные или рычажно-зубчатые передачи. Толкатели снабжают башмаками, непосредственно контактирующими с профильной поверхностью кулачка. В большинстве случаев применяют остроконечные и роликовые башмаки.
На рисунке 4 представлен механизм с дисковым кулачком и качающимся толкателем 1, поворачивающимся около оси 2. Остроконечный башмак 3 толкателя постоянно прижимается к кулачку пружиной 4. В автоматах продольного точения этот механизм реализован в виде суппорта балансирного типа. Корпус балансира 1, имеющий форму коромысла (рисунок 4), одновременно
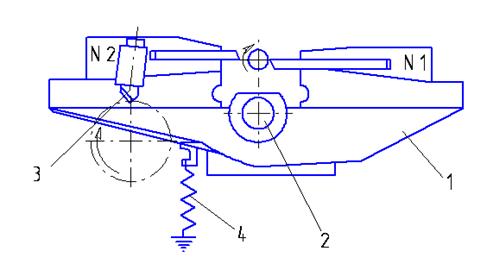
1 – толкатель; 2 – ось; 3 - остроконечный башмак; 4 - пружина
Рисунок 4 – Передача от кулачка к рабочему органу
является качающимся толкателем и рабочим органом, на концах которого размещены суппорты №1 и №2 с резцами. Подача резцов осуществляется поворотом рабочего органа вокруг оси 2 в ту или иную сторону.
На рисунке 5 представлен вариант рычажной передачи, связывающей дисковый кулачок с рабочим органом 6. Кулачок сообщает движение качающемуся толкателю 2 с остроконечным башмаком 1. Качающийся толкатель связан шатуном 3 с рычагом 5. Винт 7 служит для регулирования положения рабочего органа. Для регулирования величины хода рабочего органа, головка 4, в которой шарнирно закреплён конец шатуна 3, может перемещаться по пазу рычага 5. Аналогичные рычажные передачи сообщают движение и другим вертикальным суппортам суппортной стойки автомата продольного точения (например, на станке модели 1Б10П таких вертикальных суппортов три).
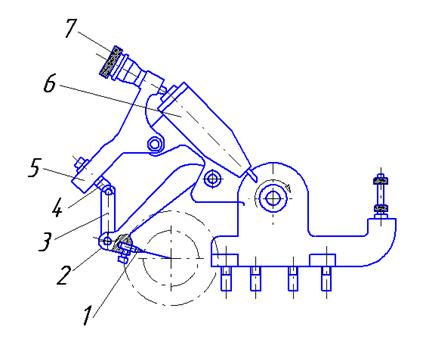 |
1 - остроконечный башмак; 2 – качающийся толкатель; 3 – шатун; 4 – головка; 5 – рычаг; 6 – рабочий орган; 7 – винт
Рисунок 5 – Рычажная передача от кулачка рабочему органу
В ряде станков, например, в токарно-револьверных автоматах применяют рычажно-зубчатые передачи (рисунок 6), связывающие дисковые кулачки с рабочими органами: передним и задним поперечными суппортами, вертикальными суппортами, продольным суппортом с револьверной головкой.

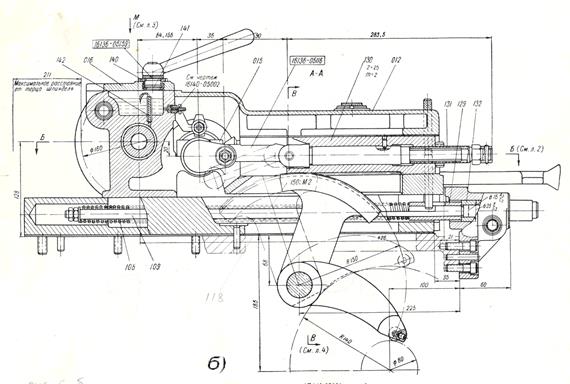 |
а - кулачкового механизма поперечных суппортов; б - кулачкового механизма продольного (револьверного) суппорта
Рисунок 6 – Рычажно-зубчатые передачи станка
В кулачковом механизме поперечных суппортов (рисунок 6, а) рычаг 9, получающий движение от дискового кулачка, выполнен заодно с зубчатым сектором, который зацепляется с рейкой 4. Для регулирования положения рабочего органа 5 (передний поперечный суппорт) зубчатая рейка выполнена подвижной. Установка рейки производится с помощью гаек 1 и 2. В требующемся положении рейка
закрепляется болтом 3. К заднему подвижному рабочему органу 6 движение передаётся двуплечим рычагом 8 и коленчатым рычагом 7, выполненным заодно с зубчатыми секторами. Рычаг 8 получает движение от своего дискового кулачка.
Кулачковый механизм продольного (револьверного) суппорта (рисунок 6, б) отличается от кулачкового механизма переднего поперечного суппорта только способом регулирования положения рабочего органа, осуществляемым в этом случае резьбовой втулкой 131.
Аналогично предыдущим устроен кулачковый механизм вертикальных суппортов.
Очевидно, величину хода рабочего органа будет определять подъём профиля кулачка и передаточное отношение кулачкового механизма, указываемое в паспорте станка.