Из уравнения
 (9.1)
(9.1)
вытекает, что возможны три принципиально различных способа регулирования скорости двигателя:
1) Изменением тока возбуждения (магнитного потока) двигателя;
2) Изменением сопротивления цепи якоря посредством резисторов (реостатное);
3) Изменением подводимого к якорю двигателя напряжения.
Схемы возможных способов регулирования можно изобразить в виде некоторой универсальной схемы, рис.9.1.
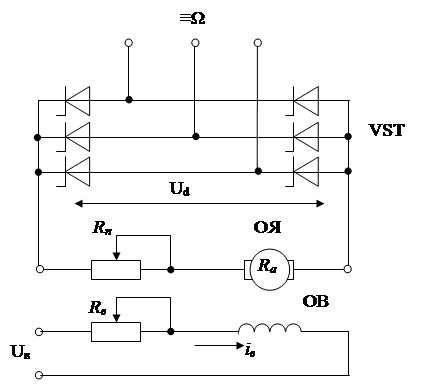

Рисунок 9.1. Три способа регулирования в одной схеме ДПТ
Первый способ – изменение магнитного потока регулирования iв с помощью реостата Rв. При выведенном реостате Rв = 0 имеем Ф = Фтах, при введении реостата, Rв > 0, магнитный поток можно только ослабить, так как Фтах = Фном. На рис. 9.2 показаны механические характеристики регулирования скорости магнитным потоком.
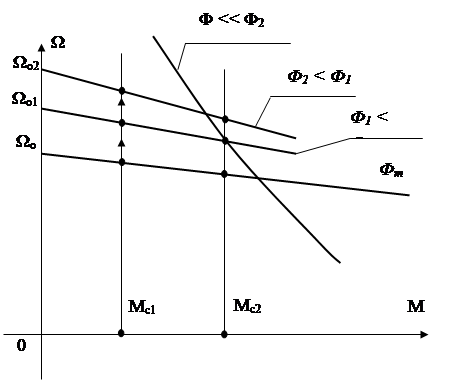 |
Рисунок 9.2. Смещение МХ вверх от ЕМХ при ослаблении магнитного потока
При ослаблении магнитного потока увеличивается скорость идеального холостого хода Ωо = U / кФ. С увеличением нагрузочного момента Мс > 0 наклон характеристик возрастает тем более, чем меньше магнитный поток.
Таким образом изменение магнитного потока Ф (его уменьшение) позволяет регулировать скорость только вверх от основной;
- с увеличением нагрузочного момента диапазон регулирования уменьшается;
- экономичность регулирования снижается при увеличении скорости, так как переменные потери пропорциональны перепаду скорости ∆Ω = W0 - W.
При сильном ослаблении магнитного потока и работе с большими моментами нагрузки скорость может падать (опрокидывание регулирования).
- плавность регулирования высокая, так как реостатом с малыми токами возбуждения (iв н » 0,05 Iа н) можно плавно изменять iв.
Второй способ – регулирование введением сопротивления Rп в цепь якоря (часто для этой цели могут использоваться пусковые сопротивления). При этом Ф = Фтах, U = Uп = const.
Так как сопротивления Rп должны пропускать нагрузочные токи якоря, то регулирование скорости ступенчатое.
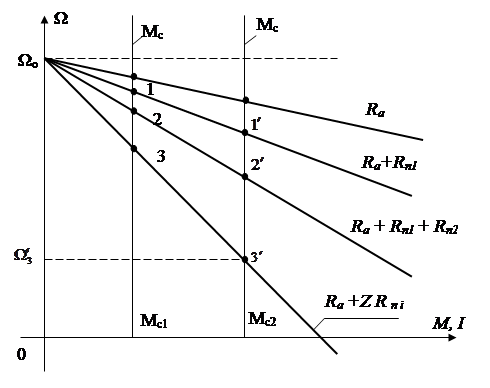 Характеристики момента при различных значениях Rп = Rп1, Rп2, Rп3 напоминают пусковую диаграмму тока, рис.9.3.
Характеристики момента при различных значениях Rп = Rп1, Rп2, Rп3 напоминают пусковую диаграмму тока, рис.9.3.
Рисунок 9.3. Механические характеристики реостатного регулирования скорости
Показатели реостатного регулирования скорости:
- регулирование – вниз от основной скорости;
- диапазон регулирования зависит от нагрузочного момента Мс: чем больше Мс , тем больше диапазон; без нагрузки скорость не
- регулируется;
- плавность низкая, это так называемое ступенчатое регулирование;
- экономичность – низкая.
Так, например, при скорости  и моменте Мс2 имеем: мощность идущая на вал двигателя или полезная мощность:
и моменте Мс2 имеем: мощность идущая на вал двигателя или полезная мощность:
 ,
,
а потери мощности на сопротивлениях

то есть потери превышают полезную мощность. Реостатное регулирование поэтому называют часто регулирование потерями.
Третий способ – регулирование скорости напряжением, подводимым к якорю двигателя. Если есть возможность его осуществления, то это самый эффективный способ.
Для его реализации необходим источник постоянного напряжения (генератор) с плавным регулированием величины самого напряжения. Обмотка возбуждения генератора при этом подключается на постоянное независимое напряжение при максимальном магнитном потоке.
Такой принцип регулирования для мощных приводов, например, гребного винта реализуется на многих судах. Первичный двигатель, например, дизель, вращает якорь генератора с постоянной скоростью. Изменением возбуждения генератора достигается плавное регулирование напряжения практически от нуля до номинального значения. Если изменить полярность напряжения на обмотке возбуждения, то изменится и полярность напряжения генератора, что можно использовать для реверса эл. двигателя, подключенного к генератору.
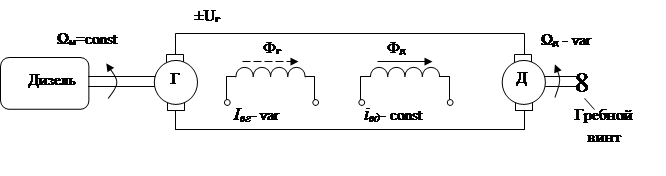
Рисунок 9.4. Система «генератор - двигатель»
На рис. 9.4 приведена схема, получившая название системы «генератор-двигатель» или система Г-Д.
Двигатель генератора (дизель) вращает генератор с постоянной скоростью Ω г - const. Ток возбуждения генератора iв г плавно может изменяться от нуля до максимального. При этом напряжение U г так же будет меняться от нуля до + U г тах . При изменении направления тока iвг в обмотке возбуждения такое регулирование напряжения можно осуществить и для обратной полярности, то есть от нуля до – U г тах .
Подключенный к генератору двигатель дизель обычно имеет высокую скорость (до 1500 об/мин), в то время как исполнительный двигатель Д, вращающий гребной винт, может иметь меньшую скорость. Тем самым исключается редуктор, устанавливаемый обычно между быстроходным дизелем и тихоходным гребным винтом. Так как дизель при любой нагрузке работает с постоянной скоростью, то это создает наилучший для него режим (нерегулируемый по скорости дизель рассчитывается на один оптимальный скоростной режим).
 Если учесть, что реверс гребного двигателя и гребного винта можно осуществить изменением полярности напряжения генератора, то мы получаем электрический привод гребного винта с высокой управляемостью (регулирование скорости и реверс) без всяких механических регуляторов. Исключается еще один важный механический элемент – шинно-пневматическая муфта, позволяющая иметь работающий дизель и не работающий винт, так как механический вал заменен электрическим, который можно просто «отключать».
Если учесть, что реверс гребного двигателя и гребного винта можно осуществить изменением полярности напряжения генератора, то мы получаем электрический привод гребного винта с высокой управляемостью (регулирование скорости и реверс) без всяких механических регуляторов. Исключается еще один важный механический элемент – шинно-пневматическая муфта, позволяющая иметь работающий дизель и не работающий винт, так как механический вал заменен электрическим, который можно просто «отключать».
Рисунок 9.5. Семейство механических характеристик системы «Г – Д» в приводе гребного винта
На рис.9.5 изображены механические характеристики, используемые для регулирования работы двигателя.
При быстром снижении напряжения двигатель переходит в режим генераторного торможения, точки характеристик при этом оказываются во II квадрате (+Ω1 – М). Также регулируемые по скорости электрические приводы (по системе Г-Д) используются до настоящего времени в чёрной металлургии на прокатных станках.
Так как жесткость характеристик постоянна, в цепях якоря и возбуждения не используется сопротивлений, то, в дополнение к достоинствам управления, можно добавить еще и экономичность.
Описанная система регулирования скорости двигателя постоянного тока в приводе гребного винта получила название «Система электродвижения», а суда с электродвижением часто называются «Электроходами».
Системе электродвижения присущи и недостатки:
- двойное преобразование энергии, и наличие соответственно двух эл. машин
- генератора и двигателя равной с дизелем мощности, приводит к утяжелению главной энергетической установки, обеспечивающий ход судна. Не высоким оказывается и КПД главной установки.
Однако описанная система может найти применение во вспомогательных гребных двигателях, или в эл. приводах подруливающих устройств.
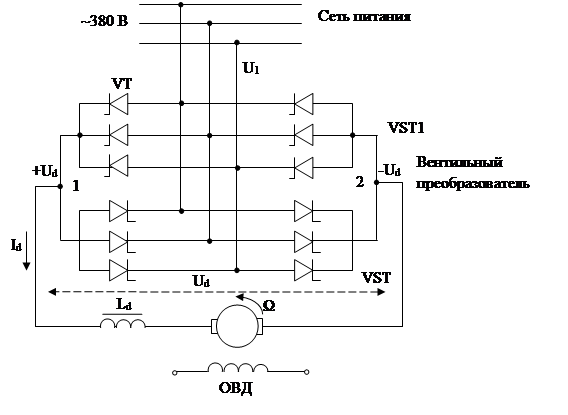 |
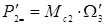
Рисунок 9.6. Двухкомплектная (VST1 и VST2) схема вентильного преобразователя с реверсированием тока в цепи якоря двигателя (М).
При этом в качестве источника регулируемого по величине напряжения может выступать управляемый выпрямитель (система УВ-Д).
Для возможности реверса и генераторного торможения применяется схема с двумя комплектами выпрямителей, см. рис. 9.6.
Вентильные группы VST1 и VST2 собраны в схемы трехфазных мостовых выпрямителей на управляемых вентилях-тиристорах VT.
При прямом направлении выпрямленного напряжения +Ud (точка 1) выпрямленный ток Id будет протекать в направлении от точки 1 к точке 2 схемы, обеспечивая, например, прямое направление вращения Ω якоря машины М. При этом в выпрямительном режиме будет работать группа VST1. Для регулирования величины Ud, а, следовательно, и скорости Ω, управляющие импульсы на тиристоры VT группы подаются с регулируемым углом управления α. Выпрямленное напряжение Ud зависит от угла направления α в соответствии с формулой:
Ud = Udo· cos α,
где Udo – максимальное выпрямленное напряжение при α = 0 и сos α = 1.
Соотношение между переменным напряжением ~U1 и выпрямленным напряжением = Udo для трехфазной мостовой схемы выпрямления определяется из соотношения
Udo = 1,35 U1.
При U1 = 380 B, тогда Udo = 513 B. Поэтому для согласования напряжений между сетью питания U1 и выпрямленным напряжением Ud включается понижающий трансформатор. В противном случае к выходу вентильного преобразователя подключается двигатель с номинальным напряжением 500 В.
Вторая группа вентилей VST2 работает для обеспечения обратного направления вращения двигателя.
Контрольные вопросы:
1. Назовите основные показатели регулирования скорости двигателей
2. Назовите основные способы регулирования скорости двигателей постоянного тока (ДПТ) ссылаясь на уравнение напряжения ДПТ с демонстрацией характеристик и схемы, включающей все способы регулирования скорости
3. Особенности регулирования снижением магнитного потока.
4. Основные показатели реостатного регулирования. Достоинства и недостатки.
5. Как возможно осуществить регулирование изменением подводимого напряжения.
6. Рассмотреть схему Г-Д с объяснением данного способа регулирования с использованием семейства механических характеристик
7. Принцип системы «электродвижения» судна. Ее недостатки.
8. Что в системе УВ-Д выступает в качестве источника регулируемого по величине напряжения. От чего зависит величина выходного выпрямленного напряжения, подаваемого на ДПТ. Как осуществлять реверсирование в схеме.