Для расчёта эфемерид нам необходимы данные из навигационного сообщения для каждого спутника в определенный момент времени, содержащиеся в подкадрах 1, 2 и 3, а именно:
 - средняя аномалия в начале отсчёта,
- средняя аномалия в начале отсчёта,
 - изменение среднего движения от начала отсчёта времени, отриц. и полож.
- изменение среднего движения от начала отсчёта времени, отриц. и полож.
 - эксцентриситет орбиты
- эксцентриситет орбиты
 - квадратный корень главной полуоси
- квадратный корень главной полуоси
 - долгота восходящего узла за недельную эпоху
- долгота восходящего узла за недельную эпоху
 - угол наклона в начале отсчёта
- угол наклона в начале отсчёта
 - расстояние перицентра от узла
- расстояние перицентра от узла
 - прецессия восходящего узла
- прецессия восходящего узла
IDOT – скорость изменения наклона орбиты
 - амплитуда косинусной гармонической поправки к аргументу широты
- амплитуда косинусной гармонической поправки к аргументу широты
 - амплитуда синусной гармонической поправки к аргументу широты
- амплитуда синусной гармонической поправки к аргументу широты
 - амплитуда косинусной гармонической поправки к радиусу орбиты спутника
- амплитуда косинусной гармонической поправки к радиусу орбиты спутника
 - амплитуда синусной гармонической поправки к радиусу орбиты спутника
- амплитуда синусной гармонической поправки к радиусу орбиты спутника
 - амплитуда косинусной гармонической поправки к радиусу орбиты спутника
- амплитуда косинусной гармонической поправки к радиусу орбиты спутника
 - амплитуда синусной гармонической поправки к углу наклонения
- амплитуда синусной гармонической поправки к углу наклонения
 - опорное время (опорная эпоха эфемерид или начальное время синхронизации данных)
- опорное время (опорная эпоха эфемерид или начальное время синхронизации данных)
 - коэффициент (постоянной составляющей) аппроксимации временных параметров
- коэффициент (постоянной составляющей) аппроксимации временных параметров
- коэффициент (первого порядка составляющей) аппроксимации временных параметров
- коэффициент (второго порядка составляющей) аппроксимации временных параметров
 - опорное время
- опорное время
ITOW – время приемника GPS в миллисекундах
PR - псевдодальность
Координаты спутника определяются для каждого вектора, полученного на выходе алгоритма дешифровки навигационных параметров. Для расчёта координат навигационных спутников в геоцентрической фиксированной системе координат (ECEF) используется следующий алгоритм:
1) Рассчитаем системное время GPS на момент передачи сообщения (в секундах):
 (1)
(1)
где скорость света с = 2.99792458 x 108 м/с2
2) Определяется время, отсчитываемое от опорной эпохи эфемерид (время излучения метки времени по системной шкале):
 , (2)
, (2)
где:
t - системное время GPS на момент передачи сообщения (время в UTC, на которое производим вычисление координат навигационного спутника. Для получения координат навигационного спутника ежесекундно t необходимо на каждом новом шаге прибавлять одну секунду) Системное время GPS устанавливается управляющим сегментом и сверяется с UTC и поддерживается Морской обсерваторией США. Нулевой отчет времени GPS определен в полночь с 5 на 6 января 1980 г. Наибольшая единица, используемая в формировании времени GPS - одна неделя, определенная как 604 800 секунд. Время GPS может отличаться от UTC, что связано с дрейфом непрерывной шкалы времени GPS и периодически корректируемым на целое число скачков секунд временем UTC Управляющий сегмент контролирует системную временную шкалу GPS и она не должна отличаться от UTC более, чем на 1 микросекунду. В навигационные сообщения включаются данные по связи времени GPS и UTC Точность этих данных на интервале передачи находится в пределах 90 наносекунд.
- опорное время (опорная эпоха эфемерид или начальное время синхронизации данных), извлекаемое из навигационного сообщения.
 - поправка для перехода от бортовой шкалы времени к системной шкале. Эта поправка вычисляется по формуле:
- поправка для перехода от бортовой шкалы времени к системной шкале. Эта поправка вычисляется по формуле:
 (2)
(2)
где:
 - коэффициенты полинома по расчёту поправки для перехода от бортовой шкалы измерения времени к системной шкале;
- коэффициенты полинома по расчёту поправки для перехода от бортовой шкалы измерения времени к системной шкале;
 - поправка на релятивистский эффект, которая вычисляется в пункте 4 данного алгоритма (в первый проход его значение приравнивается нулю).
- поправка на релятивистский эффект, которая вычисляется в пункте 4 данного алгоритма (в первый проход его значение приравнивается нулю).
Если tk>302400 c, то истинное tk=tk-604800 c, если tk< -302400 c, то истинное tk=tk+604800 c.
3) Рассчитывается средняя аномалия навигационного спутника для данной эпохи.
 (3)
(3)
где:
- средняя аномалия в начале отсчёта, извлекаемая из навигационного сообщения, n – среднее движение, рассчитываемое по формуле:
 , (4)
, (4)
где:
 - расчётное среднее движение, рассчитываемое по формуле
- расчётное среднее движение, рассчитываемое по формуле
 , (5)
, (5)
в которой A–большая полуось орбиты навигационного спутника  , извлекаемая из навигационного сообщения,
, извлекаемая из навигационного сообщения,  , - изменение среднего движения от начала отсчёта времени, передаётся в кадре навигационного сообщения.
, - изменение среднего движения от начала отсчёта времени, передаётся в кадре навигационного сообщения.
4) Методом итераций решается уравнение Кепплера для расчёта эксцентрической аномалии 

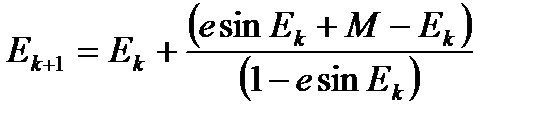 (6)
(6)
где:
- эксцентриситет, извлекаемый из навигационного сообщения; в качестве начального приближения  берут следующее выражение:
берут следующее выражение:
 (7)
(7)
Процесс продолжаем до тех пор, пока | Еk+1 – Еk| < 10−7.
Этот критерий не проверять. Критерием истинности значения полученной эксцентрической аномалии является вычисленное значение средней аномалии М эпохи tk по полученному значению:
 (8)
(8)
Полученное значение средней аномалии М эпохи tk должно быть равно значению из пункта 2 данного алгоритма.
5) Вычисляем член, отвечающий за релятивистский эффект в уравнении поправки перехода от бортовой шкалы измерения времени к системной шкале:
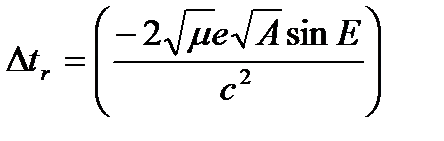 (9)
(9)
где:
Е – эксцентрическая аномалия, вычисленная на шаге 3, A–большая полуось орбиты навигационного спутника , извлекаемая из навигационного сообщения, , с – скорость света c = 2.99792458 x 108 м/сек2
После вычисления повторяем все вычисления, начиная с пункта 1 по 4.
6) Производится расчёт истинной аномалии на данную эпоху:
 (10)
(10)
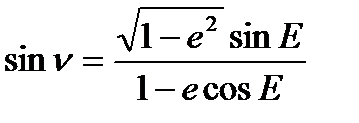 (11)
(11)
где:
 - эксцентрическая аномалия, которая ищется на шаге 3 при решении уравнения Кепплера, - эксцентриситет, извлекаемый из навигационного сообщения.
- эксцентрическая аномалия, которая ищется на шаге 3 при решении уравнения Кепплера, - эксцентриситет, извлекаемый из навигационного сообщения.
Далее с учётом знака sin и cos определяем номер четверти угла  . И с учётом номера четверти для нахождения υ вычисляем либо arcsin (
. И с учётом номера четверти для нахождения υ вычисляем либо arcsin ( ), либо arccos ().
), либо arccos ().
7) Находится предварительный аргумент широты
 (12)
(12)
где:
 - истинная аномалия, вычисленная на шаге 5, - расстояние перицентра от узла, извлекаемое из навигационного сообщения.
- истинная аномалия, вычисленная на шаге 5, - расстояние перицентра от узла, извлекаемое из навигационного сообщения.
8) Рассчитывается исправленный аргумент широты за счёт гравитационного возмущения орбиты навигационного спутника:
 (13)
(13)
где:
, извлекаются из навигационного сообщения.
9) Вычисляется радиус-вектор навигационного спутника для данной эпохи:
 (14)
(14)
где:
,  извлекаются из навигационного сообщения.
извлекаются из навигационного сообщения.
10) Вычисляется наклон возмущённой плоскости орбиты к плоскости экватора:
 (15)
(15)
где:
, , , IDOTизвлекаются из навигационного сообщения.
11) Вычисляется положение навигационного спутника в орбитальной плоскости
 (16)
(16)
12) Вычисляется долгота восходящего узла орбиты навигационного спутника
 (17)
(17)
где:
 извлекаются из навигационного сообщения,
извлекаются из навигационного сообщения,  - угловая скорость вращения Земли (стандарт WGS - 84),
- угловая скорость вращения Земли (стандарт WGS - 84),  .
.
13) Расчёт координат навигационного спутника на момент tk в геоцентрической фиксированной системе координат (ECEF) без учёта времени распространения сигнала до потребителя производится по формулам:
 (18)
(18)
14)Вычисляются прямоугольные координаты навигационного спутника на момент времени tk с учётом времени распространения сигнала от навигационного спутника до потребителя:
 (19)
(19)
где время распространения сигнала от навигационного спутника до потребителя вычисляется по формуле:
 (20)
(20)
здесь:
D – измеренная псевдодальность навигационный спутник – потребитель, с – скорость света c = 2.99792458 x 108 м/сек2