Типовые звенья систем автоматики, их свойства и характеристики.
Существует чрезвычайно большое разнообразие систем, автоматически выполняющих те или иные функции по управлению различными физическими процессами во всех областях техники.
Автоматическая система способна в течение длительного времени нужным образом изменять какие-либо физические величины в том или ином управляемом процессе.
Автоматизированная система – система, в качестве одного из узлов которой используется человек-оператор.
Операция управления – действия, направленные на правильное и высококачественное функционирование объекта управления. Они обеспечивают в нужный момент времени начало, порядок следования и прекращение отдельных действий; предусматривают выделение необходимых ресурсов и задают нужные параметры самому процессу.
Объект управления – это совокупность технических средств, выполняющих определенный процесс и подлежащих управлению.
Все системы автоматического управления (САУ) можно классифицировать следующим образом.
1. По виду структурной схемы:
– разомкнутые (автоматы, работающие по некоторым программам);
– замкнутые (с обратной связью).
2. По виду уравнений динамики процессов управления:
– линейные;
– нелинейные.
Наиболее полно изучены линейные системы.
3. По характеру передачи сигнала:
– непрерывные;
– дискретные:
– импульсные (дискретные по времени);
– цифровые (дискретные по времени и по уровню);
– релейные (сигнал изменяется скачком).
4. По характеру функционирования:
– обычные;
– адаптивные (самонастраивающиеся).
5. В зависимости от характера изменения управляющего воздействия:
– системы автоматической стабилизации;
– системы программного управления;
– системы слежения.Существует чрезвычайно большое разнообразие
Типовая схема САУ выглядит следующим образом (рис. 1).
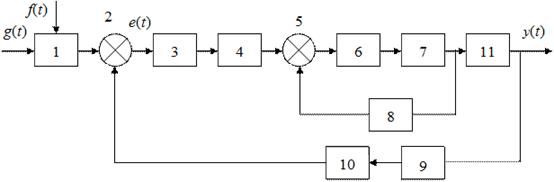
Рис. 1. Типовая схема САУ
g(t) – задающее воздействие;
f(t) – возмущающее воздействие (может действовать на любой блок системы);
у(t) – выходной сигнал;
1 – задающее устройство. Устройство преобразует входное воздействие g(t) в сигнал, пропорциональный заданному значению выходной величины у(t);
2, 5 – устройства сравнения. Вырабатывают сигнал рассогласования (ошибки) е(t) между входным сигналом и сигналом главной обратной
связи;
3 – преобразующее устройство;
4, 8 – корректирующие устройства. Повышают качество управления;
6 – усилительное устройство;
7 – исполнительное устройство;
9 – измерительное устройство;
10 – согласующее устройство. Вырабатывает сигнал, находящийся в определенной функциональной зависимости от регулируемой переменной;
11 – объект управления.
Таким образом, упрощенно любую САУ можно представить следующим образом (рис. 2).
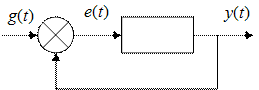
Рис. 2. Упрощенная схема САУ
Характеристика типовых звеньев системмы автоматики.
Различают два основных типа характеристик систем автоматического управления и их звеньев:
1. Временные характеристики;
2. Частотные характеристики.
Временной характеристикой системы называется закон изменения выходной величины в функции времени при изменении входного воздействия по определенному закону и при условии, что до приложения воздействия система находилась в покое. Временные характеристики определяются как реакция системы на типовые воздействия при нулевых начальных условиях.
К основным временным характеристикам относятся переходная функция и функция веса.
Типовые воздействия. В качестве типовых воздействий при исследовании систем используются:
– единичная функция;
– единичный импульс;
– линейно – растущее воздействие;
– квадратичное воздействие;
– гармоническое воздействие.
Переходная функция. Переходная функция h(t) – реакция системы на единичное воздействие при нулевых начальных условиях.
Весовая функция. Весовая функция k(t) – реакция системы на единичный импульс при нулевых начальных условиях.
Методы определения временных характеристик
1. Классический метод (основан на решении дифференциальных уравнений).
2. Операторный метод, использующий разложение на простые дроби.
3. Операторный метод, использующий вычеты.
4. Метод аналогового и цифрового моделирования.
5. Метод трапеций.
Наряду с методом временных характеристик в теории автоматического управления широко используются методы частотных характеристик, которые определяют поведение системы при подаче на ее вход гармонических колебаний.
Амплитуда, фаза, действительная и мнимая части частотной функции могут быть графически представлены в виде амплитудно - фазовой, действительной, мнимой, амплитудной и фазовой частотных характеристик. Геометрическое место концов векторов частотной функции при различных частотах определяет амплитудно-фазовую частотную характеристику (АФЧХ).