В лабораторной работе поступательное и вращательное движение тел изучается на установке, основной частью которой является модель маятника Обербека – крестообразный маятник. Схема установки приведена на рис.1.
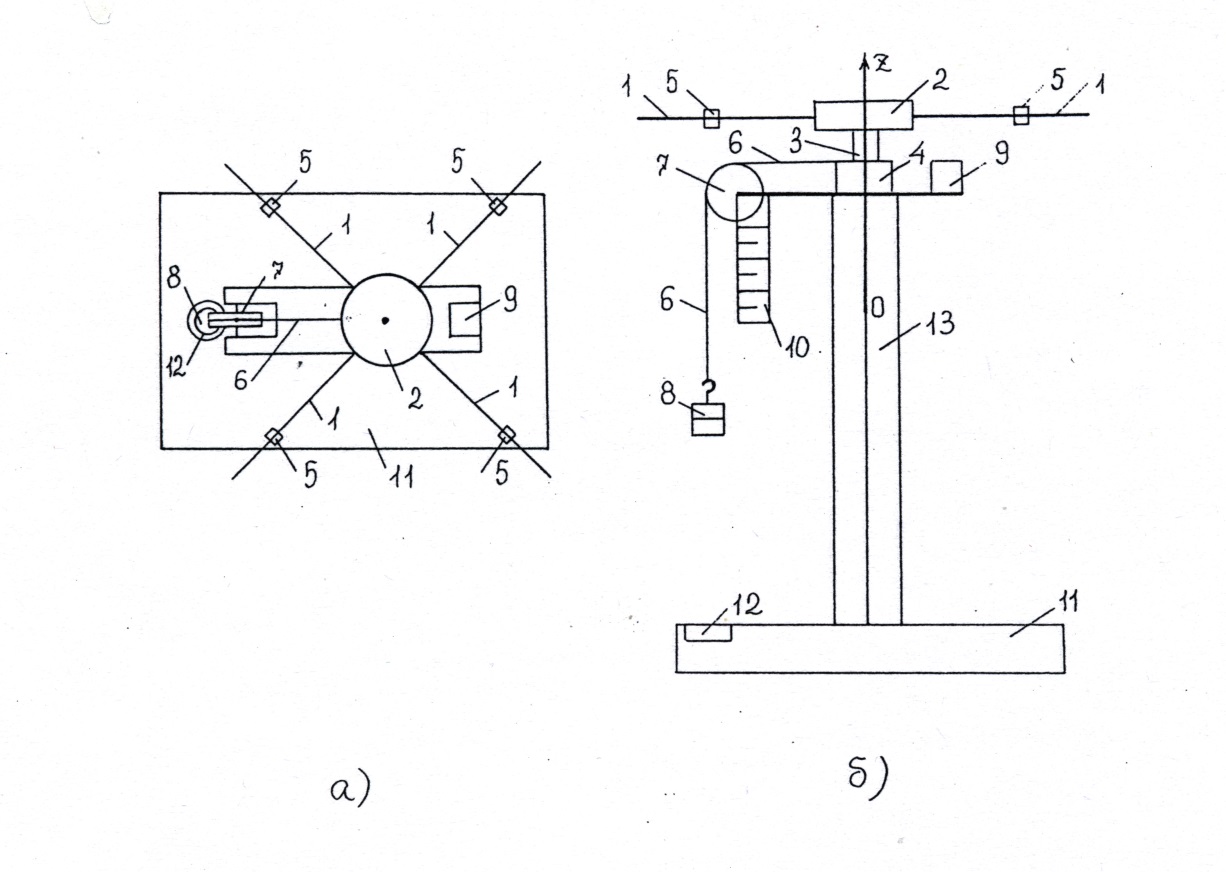
Рис. 1 Модель маятника Обербека
Вращающейся частью установки (рис. 1, а) являются четыре одинаковых стержня 1, укрепленных на цилиндрическом диске 2 под прямым углом друг к другу (крестовина), и два шкива 3 и 4 различного диаметра D, жестко соединенные с диском 2. На стержнях находятся цилиндрические грузы 5, которые можно перемещать по стержням, и с помощью винтов на них закреплять на выбранных расстояниях на стержнях.
Диск крестовины и шкивы насажены на общий стержень, закрепленный в подшипниках так, что вся эта система – маятник Обербека – может вращаться вокруг вертикальной оси, перпендикулярной горизонтальной плоскости крестовины и проходящей через ось диска.
К шкивам прикрепляется нить 6. Нить перекидывается через блок 7, к свисающему свободному концу нити подвешивается груз 8. Если, вращая маятник руками, намотать нить на шкив и поднять груз 8 на некоторую высоту, а затем отпустить маятник, то груз, опускаясь, приводит всю систему в движение. При этом груз совершает поступательное движение, а маятник – вращательное.
Фиксация груза на выбранной высоте осуществляется с помощью электромагнита 9, расположенного в верхней части установки. Высота подъема груза над столиком установки 11 измеряется линейкой 10.
Для измерения времени падения груза используется цифровой секундомер. При нажатии кнопки секундомера «пуск» электромагнит автоматически отключается, и груз начинает опускаться, а секундомер начинает считать время. В место падения груза на столик 11 вмонтирован датчик 12, выключающий секундомер при ударе груза об это место столика установки.
Подвешивая грузы с разной массой и наматывая нить на разные шкивы, можно изменить момент сил, действующих на маятник, а передвигая цилиндрические грузы на стержнях, можно изменять момент инерции маятника.
Таким образом, установка позволяет измерить высоту падения (подъема) груза h и время падения t, на основе которых при заданных значениях массы груза m и диаметра шкива D можно определить кинематические, динамические и энергетические характеристики поступательного движения груза и вращательного движения маятника, принимая их равноускоренными.
На маятник действуют сила натяжения нити F н и сила сопротивления F с, обусловленная трением в подшипниках и сопротивлением воздуха. (Сила тяжести маятника уравновешена силой реакции стойки 13, на которую укреплен маятник). Обозначим моменты сил М н и М с соответственно. Запишем основной закон динамики вращательного движения маятника с учетом знаков моментов сил
 . (1)
. (1)
Момент инерции маятника при неизменном расположении цилиндрических грузов 5 на стержнях будет постоянным. Если пренебречь зависимостью силы сопротивления от скорости, то момент сил сопротивления будет также постоянным. Поэтому проверка зависимости (1) сводится к проверке линейной зависимости углового ускорения α от момента силы натяжения нити М н.
Момент силы натяжения можно изменять, подвешивая к свободному концу нити грузы 8 с разной массой и наматывая нить на разные шкивы.
График зависимости углового ускорения от момента силы натяжения позволяет определить момент инерции маятника I и момент сил сопротивления М с. Данная зависимость является линейной, поэтому угловой коэффициент прямой (тангенс угла наклона прямой) будет величиной, обратной моменту инерции ( ).
).
Отрезок М но, отсекаемый прямой на оси абсцисс, является моментом силы натяжения, при котором угловое ускорение равно 0, т.е. моментом силы натяжения, при котором маятник начинает вращаться. Поэтому согласно уравнению (1) М но = М с.
Считая, что поступательное движение груза и вращательное движение маятника, являются равноускоренными, можно установить зависимость между угловым ускорением маятника, высотой и временем опускания груза:
 . (2)
. (2)
Пренебрегая массой нити, массой блока 7 и силой сопротивления, действующей на блок, принимая, что нить действует на шкив с силой, по величине равной силе натяжения нити, и, используя выражение момента силы через плечо силы, получим выражение момента силы натяжения Мн через h, t, m, D:  . (3)
. (3)