Суть первой задачи поиска заключается в том, чтобы найти состояние (состояния), соответствующие цели в заданном пространстве поиска. Для выполнения этой задачи вполне достаточно применить схему поиска, представленную на рисунке 1.1. Результатом решения первой задачи является найденное состояние (состояния), соответствующие цели. В зависимости от организации пространства состояний и используемого способа генерации, задача может быть решена с теми или иными ресурсными затратами. Для решения этой задачи может быть применен управляемый и неуправляемый вид поиска, осуществляемый в однонаправленном и n -направленном режимах. Отсутствие ограничений к применению базовых процедур поиска для решения задачи поиска состояния, и отсутствие требований к использованию каких-то дополнительных процедур, позволяет отметить, что эта задача поиска является относительно простой, и может быть выполнена любым методом поиска.

2) Следующая задача поиска заключается в определении места расположения целевого состояния (состояний) в пространстве поиска. Эта задача поиска заключает в себе двойственный смысл. С одной стороны, задача определения «расположения» целевого состояния может трактоваться как задача определения расстояния от начального до целевого состояния. С другой стороны, задача может быть интерпретирована как задача выделения пути от начального до целевого состояния. По сути, задача определения расстояния и задача выделения пути являются различными. Это существенное различие также подтверждается тем, что для их решения используются методы поиска с принципиально различной организацией.
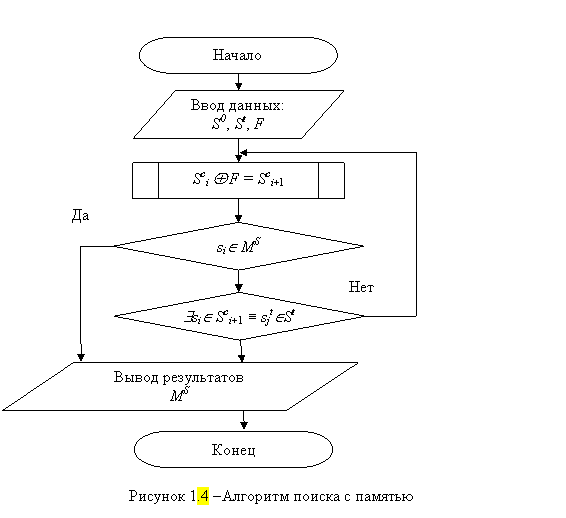
Для определения расстояния до целевого состояния уже не достаточно использовать схему поиска с применением только базовых процедур представленную на рисунке 1.1. Эта схема должна быть усложнена в части процедуры проверки путем сохранения апостериорной информации о ходе поиска. Например, в памяти: MS поисковой системы может быть сохранена последовательность операторов Fi и/или текущие оригинальные состояния Sc. Как это показано на рисунке 1.4.
Для выделения оптимального пути от начального состояния до целевого также недостаточно использовать схему поиска, представленную на рисунке 1.1. Эта схема должна быть усложнена в части процедуры выбора перспективного текущего состояния на всех итерациях поиска. Такой выбор состояний, через которые пройдет путь, обычно выполняется на основе априорной информации. В этом случае априорная информация используется как критерий оптимальности при выборе состояний, составляющих оптимальный путь. Обычно в методах поиска ориентированных на решения задачи по выделению оптимального пути, априорная информация представлена в оценочной функции. При достижении целевого состояния цепочка операторов вида: < Li = { f 1 , f 2 ,..., fn }> представляет собой искомый путь от начального состояния до целевого состояния, оптимальный относительно заданной оценочной функции. На рисунке 1.5 представлен алгоритм поиска на основе оценочной функции f (x).
Для решения задачи выделения оптимального пути может быть использован управляемый вид поиска, осуществляемый обычно в однонаправленном режиме.

3) Следующей задачей поиска является задача преследования цели. Эта задача поиска, так же как и предыдущая задача, заключает в себе двойственный смысл.
С одной стороны под целью преследования может быть указано определенное состояние (состояния), изменяющие свое расположение в пространстве поиска. Преследование цели обычно выполняется с помощью традиционного метода «погони», метода с постоянным или переменным углом опережения, методом параллельного и пропорционального сближения. Каждый класс методов преследования цели обладает свойственными ему достоинствами и недостатками. В конкретном случае выбор того или иного метода преследования цели определяется относительно скорости работы поисковой системы, направления и скорости перемещения цели, от объема и точности априорной и текущей апостериорной информации. Для реализации методов преследования цели используется управляемый поиск, осуществляемый в однонаправленном и n -направленном режимах.
С другой стороны преследование цели может быть интерпретировано как исследование и/или анализ изменений свойств состояний пространства поиска. Для решения этой задачи обычно применяют метод полного перебора состояний пространства поиска (breadth-first process). Практически все методы поиска, представленные в [1-5,7,8] прекращают поиск, как только достигается целевое состояние, определяется расстояние или выделяется путь. Суть задачи полного перебора заключается в определение модели организации пространства поиска и/или распределения целевых состояний. Например, модели должны позволить определить вид и динамику изменения распределения состояний в пространстве поиска. Модель целевых состояний может быть представлена в виде оценки плотности распределения состояний в пространстве поиска. По этой причине для реализации метода полного перебора использование алгоритма поиска, представленного на рисунке 1.1, недостаточно. Для реализации метода полного перебора необходимо априори задать цель исследования и/или анализа. Для решения этой задачи следует использовать управляемый вид поиска, осуществляемый обычно в однонаправленном режиме.
Первая задача: Поиск состояния, нескольких заданных, всех состояний St на дереве или графе из одного, нескольких заданных, всех состояний So.
Вторая задача: Определение расстояния, т.е. ограничение направления поиска или граничной глубины поиска: Hi, до заданного состояния, нескольких заданных, всех состояний St на дереве или графе из одного, нескольких заданных, всех состояний So.
Третья задача: Выделение оптимального пути как цепочки: Li = (f 1, f 2, …, fn), до заданного состояния, нескольких заданных, всех состояний St на дереве или графе из одного, нескольких заданных, всех состояний So;