Возникновение препятствия на одной полосе двухполосной дороги с движением в одном направлении уменьшает ее пропускную способность не в 2 раза, как стоило бы предполагать, а более, поскольку появляется необходимость перестройки перед подъездом к узкому месту

Рисунок 2 - Схема возникновения препятствия на дороге
Естественной проблемой становится способ управления потоком с целью минимизации ущерба, вызванного сужением.
Формализация
Рассматривается ситуация сужения дорожного полотна (уменьшение числа полос) и моделируется поведение транспортных потоков в окрестности этого положения.

Рисунок 3 - Схема сужения дороги
При приближении к месту сужения (рисунок 3) дорога имеет т полос, по которым движется АТ-поток со скоростью vт и плотностью pтпо одной полосе. Сужение является сечением дороги, соединяющим соседние фрагменты дороги с разным числом полос, причем меньшее число соответствует участку дороги, следующему по направлению движения. После преодоления сужения АТС движутся по дороге с числом полос равным n, и соответствующие характеристики изменяются до значений vn и рn.
Пусть  - интенсивность движения по каждой из т полос при подходе к сужению, т>п.
- интенсивность движения по каждой из т полос при подходе к сужению, т>п.
Докритическая ситуация
Предположим, что после сужения транспортный поток имеет ту же интенсивность. Это означает, что в окрестности сужения отсутствуют источники и стоки АТС, а движение стационарно.
Тогда
 (14)
(14)
Пусть  и
и  - граничные функции, определяющие интервал возможных скоростей транспортного потока (рисунок 4).[3]
- граничные функции, определяющие интервал возможных скоростей транспортного потока (рисунок 4).[3]
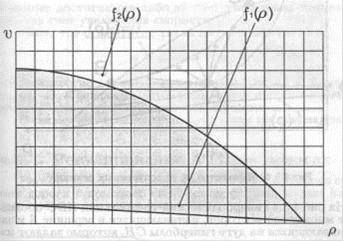
Рисунок 4 - Схема области допустимых состояний плотность - скорость
транспортный поток дорожный моделирование
Будем предполагать, что на обоих фрагментах дороги до и после "узкого места" законы зависимости скорости от плотности совпадают, и допустимые значения области плотность-скорость (рисунок 5).
Из уравнения (14) следует, что q = vmpmт.е. состояние входящего транспортного потока является точкой на гиперболе vp = q, а выходящего - на гиперболе  .
.

Рисунок 5 - Множество (v,p) допустимых решений
Гиперболический треугольник ABC (рисунок 5) обозначает множество векторов, начинающихся в вершине А и заканчивающихся на дуге гиперболы С В, которые задают изменения состояния потока.
Если L - длина переходного участка и a - ограничение на ускорение,
То
 (15)
(15)
т.е.
 (16)
(16)
Условие (16) задает ограничение в плоскости (v,p) в виде полосы (из-за монотонности функции состояния)
 (17)
(17)
Таким образом, получаем множество возможных управляющих решений перестройки АТ - потока с сохранением интенсивности
 (18)
(18)
которые достигаются либо за счет увеличения плотности, |либо за счет увеличения скорости.
Ясно, что существует такая интенсивность
 (19)
(19)
что множество управляющих решений (рисунок 5) будет пустым. Это означает, что пропустить поток данной интенсивности через сужение невозможно.