Индивидуальное задание
Во время прохождения конструкторско-технологической практики мной была выбрана тема дипломного проекта. В своем дипломном проекте я буду разрабатывать наклонный ленточный конвейер. Основные расчеты конвейера приводятся ниже.
Назначение
Основное назначение машин непрерывного действия – перемещение грузов по заданной трассе. Наклонный конвейер является составной частью транспортной цепи и предназначен для приема материала (угля) от перегрузочного комплекса и передачи его далее по цепи на распределительный конвейер.
Конвейер стационарный. Может работать в следующих климатических условиях:
при температуре окружающей среды не выше +40 °С и не ниже –40 °С;
при скорости ветра не более 20 м/с;
при отсутствии примерзания угля к конвейерной ленте;
при размере куска угля не более 300 мм.
Исходные данные
Таблица 1 – Исходные данные для проектирования конвейера
| Наименование показателей | Норма |
| Производительность объемная, м3/ч | |
| Скорость ленты, м/с | 1.3 |
| Транспортируемый материал | уголь |
| Насыпная плотность материала | 1.0 |
| Длина конвейера, м | 5.4 |
| Угол наклона конвейера, ° | |
| Натяжное устройство | Винтовое |
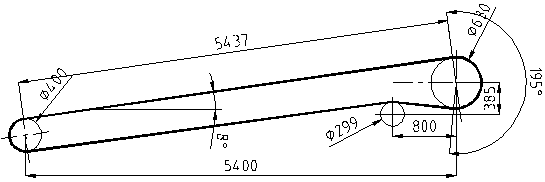
Рисунок 1 – Расчётная схема ленточного конвейера
Описание конструкции
Конвейер состоит из концевого барабана, наклонной секции, приводной станции, загрузочного и натяжного устройств.
Загрузочное устройство представляет собой лоток и предназначено для формирования слоя угля на ленте.
Разгрузка конвейера осуществляется с концевого барабана.
Приводная станция представляет собой раму приводной станции с размещенными на ней механизмами и устройствами и опирающуюся на фундамент.
Механизм натяжения ленты винтового типа расположен в хвосте. Отклоняющий барабан при затяжке винтов перемещается по направляющим.
Секция наклонная представляет собой сварную конструкцию рамного типа. На секции расположены верхние и нижние роликоопоры.
Предварительный расчёт конвейера
Определение необходимой ширины ленты
Необходимая ширина ленты из условия производительности

где Кп – коэффициент производительности, учитывающий угол естественного откоса насыпного груза ϕд, угол наклона боковых роликов αр и форму ленты. По таблице 1.1 [1] принимаем Кп = 550 при трёхроликовых роликоопорах и αр = 30°;
КВ – коэффициент, учитывающий снижение производительности наклонных конвейеров. По таблице 1.2 [1] принимаем KB 1.0 при ϕд = 20° и b = 8°.
Проверяем ширину ленты по кусковатости

где X – коэффициент кусковатости. Для рядовых грузов Х = 2.5.
аmax – наибольший размер куска, мм, принимается в зависимости от ширины ленты по таблице 2.8 [2].
Окончательно принимаем ленту шириной 1000 мм.
Проверка соответствия скорости ленты заданной производительности при ширине ленты B = 1000 мм.
Окончательно принимаем скорость ленты 1.3 м/с.
Общее сопротивление движению ленты
Общее сопротивление движению ленты определяется как

где Кд – обобщённый коэффициент местных сопротивлений на поворотных барабанах, в пунктах загрузки и других пунктах. Он уменьшается с увеличением длины конвейера L, т.к. при этом уменьшается доля сосредоточенных сопротивлений. При L = 5.4 м, Кд = 6.
Lг – полная длина горизонтальной проекции конвейера. Lг = 5.4 м.
qг – линейная сила тяжести груза, Н/м

здесь Qр.ср. – расчётная средняя производительность конвейера, т/ч

qл – линейная сила тяжести ленты, Н/м

здесь mл – масса 1м2 ленты
mл = 17.2 кг;
qр.в. – линейная сила тяжести вращающихся частей роликоопор на верхней ветви, Н/м

здесь mр.в. – масса вращающихся частей верхних роликоопор. Приблизительно можно определить по формуле

 – шаг установки роликоопор верхней ветви. Принимаем = 1200 мм.
– шаг установки роликоопор верхней ветви. Принимаем = 1200 мм.
qр.в. – линейная сила тяжести вращающихся частей роликоопор на нижней ветви, Н/м

где mр.н. – масса вращающихся частей нижних роликоопор. Приблизительно можно определить по формуле

 – шаг установки роликоопор нижней ветви. Принимаем
– шаг установки роликоопор нижней ветви. Принимаем  = 2400 мм.
= 2400 мм.
wв, wн – коэффициенты сопротивления движению верхней и нижней ветвей ленты. По таблице 1.3 [1] принимаем
wв = 0.025;
wн = 0.022;
H – высота подъёма груза, м.

здесь Lтр – расстояние транспортирования, м.
«+» перед последним слагаемым следует принимать при движении ленты вверх, а «-» – при движении вниз.
Тогда,

