Классификация ИНС:
Инерциальные навигационные системы принято подразделять следующим образом:
• системы разомкнутого типа (с малым периодом работы);
• системы замкнутого типа (шулеровские системы).
Системы обоих типов бывают:
• платформенными;
• бесплатформенными.
Платформенные ИНС, в свою очередь, подразделяются на системы следующих видов:
• полуаналитические (оси чувствительности акселерометров и гироскопов ориентированы по осям какой-либо горизонтальной сопровождающей системы координат);
• аналитические (оси чувствительности акселерометров и гироскопов ориентированы по осям геоцентрической инерциальной системы координат);
• геометрические (оси чувствительности акселерометров ориентированы по осям какой-либо горизонтальной сопровождающей системы координат, а оси чувствительности гироскопов — по осям геоцентрической инерциальной системы координат).
Состав ИНС полуаналитического типа:
1) Пространственный ГС в 3-х осном кардановом подвесе;
Чтобы избежать потери степени свободы ГС, его помещают в дополнительную раму.
Тип стабилизации: Индикаторный или индикаторно-силовой.
Сухие гироскопы не используют, т.к. они не обладают высокой точностью.
2) два 3-х степенных гироскопа -> индикаторная стабилизация
три 2-степенных гироскопа -> индикаторно силовая стабилизация.
3) три акселлерометра
4) Устройство ввода начальных данных
5) Вычислитель
Объектом стабилизации ИНС являются оси чувствительности триады акселлерометров, для получения иформации об ускорении объекта, которая необходима для построения алгоритмов ИНС.
Алгоритм ИНС - совокупность аналитических зависимостей, которые позволяют исходя из начальных условий, измерений (сигналов с акселлерометров) определить все выходные параметры системы.
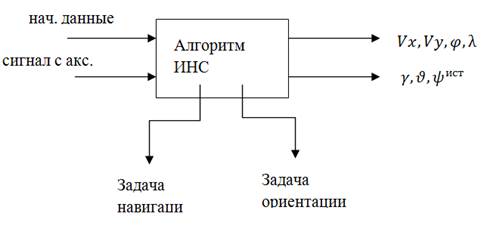
Для 2-х канальной системы существует следующая логика: при наличии начальных данных и показаний акселлерометров необходимо получить 7 параметров на выходе системы.
Сосиав алгоритма ИНС:
 - имея информацию об ускорении, получаем информацию о скорости.
- имея информацию об ускорении, получаем информацию о скорости.
 - координаты местоположения - есть функция от скорости
- координаты местоположения - есть функция от скорости
(чтобы изменить углы ориентации нужно ГВ удерживать в положении ИВ)
 скорость управления - есть функция от скорости (нужно подавать на гироскоп системы управления с определенной скоростью управления, чтобы платформа была в плоскости местного горизонта.
скорость управления - есть функция от скорости (нужно подавать на гироскоп системы управления с определенной скоростью управления, чтобы платформа была в плоскости местного горизонта.
 по северному и восточному каналам (Значения
по северному и восточному каналам (Значения  определяются выбором опорной с.к.
определяются выбором опорной с.к.
Опорная с.к. - с.к., по которой ориентированны оси чувствительности гироскопов и акселлерометров => Приборный трехгранник.
4)  -> угол ориентации
-> угол ориентации
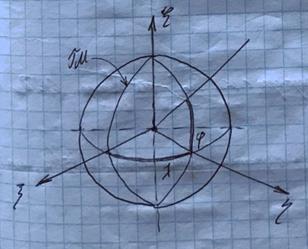
Навигационная с.к. -с.к., в которой мы определяем ИВ(истинную вертикаль).
В качестве опорного трехгранника в ИНС полуанлалитического типа могут выбирать географический трехгранник, свободную в азимуте с.к., полусвободную в азимуте с.к., ортодромическую с.к.
В качестве навигационной с.к. может выступать земная с.к.(с.к., связанная с Землей) либо любая другая с.к., в которой мы будем определять местоположение объекта.
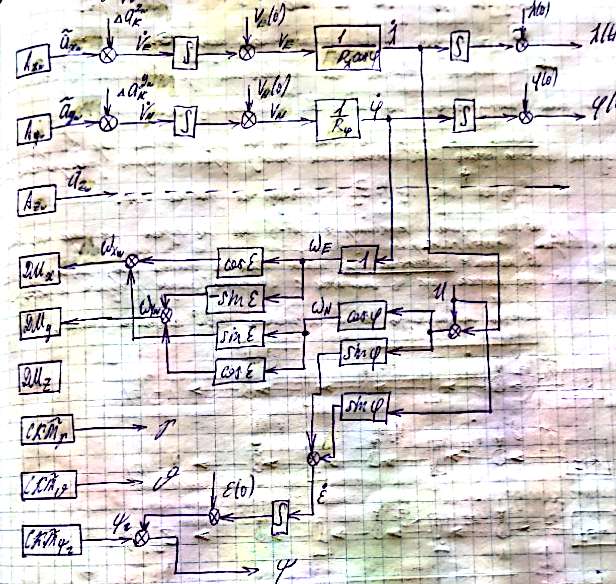
Рассмотрим моделирующую схему алгоритма для географического опорного трехгранника.

Поскольку основной с.к. является географическая с.к. то на выходе СКТψ мы получим истинный курс
Сигналы с акселлерометров необходимо скорректировать с учетом кориолисовых добавок, поскольку географический трехгранник является неинерциальной с.к.
Кориолисовы добавки:
по восточному каналу: 
по северному каналу: 
Скорости географического трехгранника:
Для формирования сигналов, т.е. для инициализации алгоритма системы в начальный момент времени записываем данные с этапа выставки и предварительной подготовки системы. Система работает по принципу "шаг за шагом".
Моделирующая схема ИНС ИС-1-72.
ИНС полуаналитического типа, в качестве опорного трехгранника - горизонтальный сопровождающий азимтально свободный трехгранник