В зависимости от функций, выполняемых специальными автоматическими устройствами, различают следующие основные виды автоматизации: автоматический контроль, автоматическую защиту, автоматическое и дистанционное управление, телемеханическое управление.
АВТОМАТИЧЕСКИЙ КОНТРОЛЬ включает в себя автоматические сигнализацию, которая предназначена для оповещения обслуживающего персонала о предельных или аварийных значениях каких-либо физических параметров, о месте и характере нарушений технологического процесса (сигнальными устройствами служат лампы, звонки, сирены, специальные мнемонические указатели и др.); Автоматическое измерение позволяет измерять и передавать на специальные указательные или регистрирующие приборы значения физических величин, характеризующих технологический процесс или работу машин. Обслуживающий персонал по показаниям приборов судит о качестве технологического процесса или о режиме работы машин и агрегатов, сортировку и сбор информации. Автоматическая сортировка осуществляет контроль и разделение продукции по размеру, весу, твердости, вязкости и другим показателям (например, сортировка зерна, яиц, фруктов, картофеля и т.п.). Автоматический сбор информации предназначен для получения информации о ходе технологического процесса, о качестве и количестве выпускаемой продукции и для дальнейшей обработки, хранения и выдачи информации обслуживающему персоналу.
АВТОМАТИЧЕСКАЯ ЗАЩИТА представляет собой совокупность технических средств, которые при возникновении ненормальных и аварийных режимов либо прекращают контролируемый производственный процесс (например, отключают определенные участки электроустановки при возникновении на них коротких замыканий), либо автоматически устраняют ненормальные режимы. Автоматическая защита тесно связана с автоматическим управлением и сигнализацией. Она воздействует на органы управления и оповещает обслуживающий персонал об осуществленной операции. Релейная защита, выполненная на основе реле, широко применяется на электрических станциях, подстанциях, в сетях и различных электроустановках. Устройства автоблокировки, входящие в автоматическую защиту, в основном предназначены для предотвращения неправильных включений и отключений и ошибочных действий обслуживающего персонала; они предупреждают возможные повреждения и аварии.
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ включает в себя комплекс технических средств и методов по управлению объектами без участия обслуживающего персонала: пуск-останов установок, вкл-откл устройств, обеспечение безаварийной работы, соблюдение требуемых значений параметров в соответствии с оптимальным ходом технологического процесса и т.д. Сочетание комплекса технических устройств с объектом управления называют системой автоматического управления (САУ), где ОУ - совокупность элементов, в которой технологические процессы подвергаются целенаправленным воздействиям.
Разновидностью автоматического управления является автоматическое регулирование, под которым понимают процесс автоматического поддержания какого-либо параметра на заданном уровне или изменение его по определенному закону. Автоматическое регулирование осуществляется специальным устройством автоматическим регулятором. Регулятор измеряет регулируемую величину и при ее отклонении от расчетного значения изменяет процесс работы объекта управления (регулирования) так, чтобы выполнялся заданный алгоритм функционирования. Автоматическая система, состоящая из регулятора и объекта управления, называется системой автоматического регулирования (САР).
ДИСТАНЦИОННОЕ УПРАВЛЕНИЕобъединяет методы и технические средства управления установками и сосредоточенными объектами на расстоянии. Импульсы на управление подаются обслуживающим персоналам по электрическим соединительным проводам при помощи соответствующих кнопок, ключей и другой командной аппаратуры.
ТЕЛЕМЕХАНИКА –область науки и техники, охватывающая теорию и технические средства автоматической передачи на расстояние команд управления и информации о состоянии объекта. Такие системы позволяют объединить в один ТП работу большого числа машин и установок, расположенных друг от друга на значительных расстояниях. В зависимости от назначения принято разделять на системы телесигнализации, телеизмерения и телеуправления.
2. В зависимости от степени автоматизации различают ручное, автоматизированное и автоматическое управление. При ручном все функции управления выполняют человек-оператор. При автоматизированном управлении часть функций выполняет человек, а другую часть-автоматические устройства. При автоматическом все функции управления выполняют автоматические устройства. Следовательно, в соответствии с этими понятиями принято делить системы управления на автоматизированные (АСУП и АСУ ТП) и автоматические (САУ ТП). АСУП и АСУ ТП–это человеко-машинные системы, обеспечивающие автоматизированный сбор и обработку информации, необходимой для оптимизации управления, контроля и режимов работы различных сфер деятельности человека (управление хозяйственно-плановой деятельностью отрасли, предприятием, комплексом, территориальным регионам, то есть управление системой сельскохозяйственных подразделений) и технологических процессов локальных производств (отдельные цеха, животноводческие и птицеводческие фермы, хранилища, колхозы и совхозы). САУ ТП представляет собой совокупность автоматических управляющих устройств и управляемого объекта, взаимодействующих друг с другом без непосредственного участия человека.
3. По степени автоматического управления производственными технологическими процессами различают частичную, комплексную и полную автоматизацию. Частичная автоматизация распространяется только на отдельные производственные операции или установки. Она не освобождает человека от участия в производственном процессе, лишь облегчает труд (дистанционное управление электрорпиводами для раздачи корма, уборка навоза на фермах). Комплексная автоматизация ТП означает автоматическое выполнение всего комплекса операций и установок по обработке материалов и их транспортировке по заранее заданным программам при помощи различных автоматических устройств, объединенных общей системой управления. Полная автоматизация в отличие от комплексной возлагает выполнение функций выбора и согласования режимов работы отдельных машин и агрегатов как при нормальном режиме, так и в аварийных ситуациях не на человека, а на специальные автоматические устройства. В этом случае все основные и вспомагательные установки способны работать в автоматическом режиме в течение длительного периода без непосредственного участия человека. За обслужеваюшим персоналом остаются функции периодического осмотра, профилактического ремонта и перестройки всей системы на новые режимы работы, на пример, системы управления микро климатом в теплицах и овощехранилищах.
МИКРОЭВМ
Использование ЭВМ в СУ расширяет возможности осуществления сложных алгоритмов управления при большом числе переменных величин, которыми характеризуется ход ТП. Участие человека в такой системе оперативного управления обеспечивает высокую эффективность и надежность функционирования ТП, т.е. позволяет решить вопросы интеллектуального свойства, возникающие из-за неполноты сведений об автоматизированном процессе.
Снижение стоимости и увеличение объемов выпуска микро-ЭВМ и микроконтроллеров изменило техническую базу автоматизации производства (какие базы?).
В общем виде МП-ное устройство, применяемое в СУ – это специализированное вычислительное устройство, приспособленное к работе в производственных условиях и включающее в себя, кроме собственно микропроцессора, также и средства для обмена сигналами с ОУ (измерительные контроллеры и интерфейсные блоки связи). При этом микропроцессор, выполненный на одной или нескольких больших интегральных схемах, предназначен для исполнения логических и арифметических операций по специальной программе, хранящейся в памяти устройства. МикроЭВМ -это комплектное устройство на базе микропроцессора, имеющее блоки памяти, ввода-вывода и сопряжения (рисунок 2).
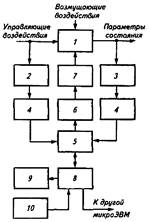
Рисунок 2 - Структурная схема МП-ной системы управления с микроЭВМ
1 - технологический ОУ; 2 - измерительные преобразователи управляющих воздействий; 3 - измерительные преобразователи выходных параметров ОУ; 4 - измерительные контроллеры; 5 - управляющая микроЭВМ; 6 - интерфейсные блоки связи с объектом;
7 - исполнительные механизмы (ИМ); 8 - интерфейсные блоки связи с периферией;
9 – дисплей; 10 – пульт оператора
Алгоритмы управления реализованы в виде программ (ПО, Soft), хранящихся в памяти ЭВМ. Интерфейсные блоки служат для связи ЭВМ с ОУ (с исполнительными механизмами и регулирующими органами) и периферийным оборудованием (с пультом оператора - использует для управления работой микроЭВМ, дисплеем - для предоставления ему информации о состоянии оборудования, контролируемых параметрах и других характеристиках автоматизированного процесса).
Сбор и преобразование в цифровую форму информации о ходе ТП, поступающей от разного рода измерительных преобразователей, осуществляются измерительными контроллерами. В состав интерфейсных блоков связи и контроллеров тоже могут входить микропроцессоры, выполняющие те операции по вводу-выводу и предварительной обработке информации, которые обычно выполняет центральный процессор.
При построении СУ сложными объектами, при ступенчатой иерархии, МП-ную СУ низкого уровня связывают с вышерасположенной через интерфейсные блоки связи.
Использование микроЭВМ в СУ имеет ряд особенностей по сравнению с использованием ее в качестве универсальной ЭВМ, ориентированной прежде всего на взаимодействие с пользователем (человеком). Задача универсальных микроЭВМ — обработка данных по запросу пользователя, поэтому все устройства ввода-вывода информации (дисплеи, принтеры, графопостроители, устройства внешней памяти и т.д.) подключаются к ЭВМ через свои блоки сопряжения по запросу пользователя.
В зависимости от достигнутого уровня совершенства технического и программного обеспечения управляющая микроЭВМ может работать в режимах (рис.3):
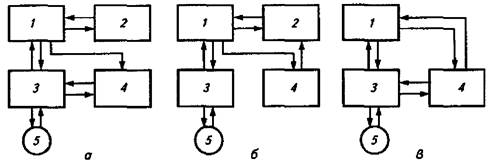
Рисунок 3 – Режимы работы микроЭВМ в системах управления ТП
а) информационно-советующий режим; б) режим супервизорного управления;
в) режим непосредственного цифрового управления:
1- технологический ОУ; 2 - локальные АС; 3 - пункт контроля и управления;
4 – управляющая микро-ЭВМ; 5 – оператор
а) – информационно-советующий режим управляющая микроЭВМ выдает оператору рекомендации по управлению ТП, которые он анализирует и либо принимает, либо отвергает, выдавая свое решение на основании текущей информации и предыдущего опыта. Принятое решение реализуют вручную, через пульт контроля и управления. Основная тяжесть задачи управления (автоматические регулирование, защита и сигнализация) ложится на локальные САУ;
б) супервизорный режим управления – здесь контроль и коррекцию работы АСУ выполняет микроЭВМ и оператор вмешивается в работу АСУ лишь в случае обнаружения нарушений хода ТП;
в) прямой цифровой режим управления микроЭВМ – обладает высокой степенью надежности, непосредственно воздействует на ТП через исполнительные механизмы.
АВТОМАТИЗАЦИИ ТП
В целях унификации технических систем контроля и регулирования ТП различных отраслей народного хозяйства создана Государственная система промышленных приборов и средств автоматизации (ГСП), действующая в пределах СНГ.
Функциональная схема ГСП включает несколько групп приборов и устройств: 1.Для получения информации о состоянии ТП; 2. Приема, преобразования и передачи информации по каналам связи; 3. Преобразования, хранения и обработки информации и формирования команд управления; 4. Использования командной информации в целях воздействия на ОУ.
Функциональная структура ГСП состоит из нескольких ветвей. Функционально-целевая структура электрической ветви ГСП, получившая наибольшее распространение в сельскохозяйственном производстве, показана на рисунке 1. Такую ветвь делят на пять уровней (групп) технических средств:
I - техсредства непосредственного взаимодействия с объектом автоматизации, преобразующие параметры в унифицированный электрический сигнал (средства контроля и сигнализации) или унифицированный сигнал в управляющее воздействие
на процесс (исполнительные органы);
II – вторичные приборы и регуляторы со встроенным датчиком для простых локальных САУ;
III – средства централизованного контроля, регулирования и управления для сложных АСУ ТП, отличающиеся наличием цифровой обработки информации;
IV – средства контроля, регулирования и управления для централизованных АСУ ТП на базе управляющей вычислительной техники, телемеханики;
V – средства вычислительной техники для решения задач автоматизации процессов организационно-экономического управления производством и предприятиями.
В сельскохозяйственной автоматике мобильных машин и агрегатов используют также технические средства гидравлической ветви ГСП, включающей устройства двух нижних уровней (правая часть рис. 1):
I - средства преобразования для получения информации и воздействия на процесс;
II — средства контроля и регулирования для простых локальных САУ.
Между техническими средствами электрической и гидравлической ветвей нередко существуют связи с взаимным обменом унифицированными сигналами благодаря применению электрогидравлических (ЭГП) и гидроэлектрических преобразователей (ГЭП), что дает возможность выбрать оптимальную структуру техсредств из устройств разных ветвей ГСП.
Самый простой вариант структуры гидравлической ветви — группа приборов, работающих без вспомогательной энергии, состоящая из регуляторов прямого действия.
Входные и выходные сигналы приборов, входящие в ГСП, гостированы: 1. Сигнал постоянного I - 0...5; 5...0...5; 0...20 мА; 2. Сигнал U – I: 0...1; 1...0...1; 0...10; 10...0...10В; 3. Сигнал U ~ I частотой 50 и 400 Гц О…0,25; 0...0,5; 0...1; 0...2В; 4. Пневматический сигнал с пределами изменения давления 0,02...0,1 МПа.
Кроме приборов, входящих в ГСП, в СХ автоматике действует большое число техсредств, оперирующих неунифицированными сигналами измерительной информации. Эти техсредства вписываются только в I и II уровни функционально-целевой структуры.
Далее рассмотрим характеристики групп технических средств, являющихся основой самых различных АСУ СХП, а именно конструктивные, метрологические статические и динамические характеристики, последние две реализуют синтез АСУ.
При этом результаты синтеза также зависят от правильного выбора измерительного устройства, исполнительного механизма (ИМ) и регулирующего органа (РО).
Рисунок 1 – Функционально-целевая структура электрической ветви ГСП