Для преобразования быстроизменяющихся сигналов с широким частотным спектром, быстрого ввода информации в ЭВМ, в частности аналоговых сигналов с первичных преобразователей при работе в многоканальных информационных системах, требуются АЦП, имеющие хорошую линейность и малое время преобразования. Последнее определяют как интервал времени, в течение которого выходной сигнал АЦП при подаче ступенчатого входного сигнала достигает значения, отличающегося от установившегося не более чем на допустимую погрешность. Следует иметь в виду, что при определении времени преобразования необходимо учитывать статическую погрешность преобразования, чтобы последняя не входила составной частью в результирующую погрешность определения времени преобразования. Поэтому под установившимся значением выходного сигнала АЦП понимают результат преобразования в статическом режиме, когда процесс преобразования заведомо завершился.
|
Контроль динамических параметров ИМС АЦП существенно зависит от конкретной структуры преобразователя, в частности от наличия синхронизирующих команд АЦП.
|
Для преобразователей, использующих команду внешнего запуска и вырабатывающих сигнал окончания цикла преобразования, значение tпр, определяют измерением временного интервала между импульсами запуска и конца цикла.преобразования. На рис. 9 приведена схема устройства измерения времени преобразования таких АЦП. С помощью.программируемого сточника образцовых напряжений ЦАПобр на входе АЦПконтр формируется требуемое значение напряжения, соответствующее коду Ni, который выдается формирователем кодов ФК на устройство сравнения кодов УСК и ЦАПобр. Затем производят периодический запуск АЦП импульсами генератора, определяющими момент начала преобразования. Импульсы, соответствующие моменту конца преобразования, поступают на Вход 2 измерителя временного интервала, на Вход 1 которого.поступают импульсы запуска АЦП. Полученный результат определяет время преобразования tпp контролируемого АЦП, а разность кодов Δ N, выдаваемая УСК в момент окончания преобразования, характеризует динамическую погрешность преобразования.
При визуальном методе контроля с помощью осциллографа эту задачу решают следующим образом. Для АЦП с последовательным кодом преобразования на экране осциллографа определяют временной интервал между импульсом запуска и моментом появления импульса выходного кодового сигнала контролируемого АЦП, соответствующего его младшему разряду (рис. 10.35, а). При параллельной форме выдачи цифровой информации с АЦП время преобразования наблюдается на экране осциллографа как расстояние (по временной оси) между передними фронтами импульса запуска АЦП и импульса t-го разряда, соответствующего допустимой динамической погрешности преобразования (рис. 10.35, б).
Автоматическое измерение tпр подобных АЦП иллюстрируется рис. 10. Отличие данной схемы от схемы рис. 9 состоит в том, что момент выдачи выходной информации с АЦП в устройство сравнения кодов УСК относительно импульса запуска АЦП можно менять с помощью программируемой линии задержки ЛЗ, обеспечивающей запись выходного кода АЦП в запоминающий регистр ЗРг1 в конкретный момент времени /,, отстоящий от импульса запуска АЦП на известное число п дискретных значений δt. Время задержки между импульсами запуска и считывания выходного сигнала АЦП определяется соотношением tзд =n δt. Момент записи выходного кода АЦП в регистр ЗРг1 и передачи его кода в УСК последовательно приближается к моменту запуска АЦП до тех пор, пока погрешность преобразования АЦП не превысит допустимое значение  .
.
Для исключения влияния погрешности формирования входного сигнала АЦП и его статической погрешности преобразования на определение динамической погрешности АЦП устройством сравнения кодов сопоставляют текущее значение выходного сигнала  АЦП при
АЦП при  с его выходным сигналом Ni' для режима преобразования, когда
с его выходным сигналом Ni' для режима преобразования, когда  . Для этого при управляющем коде Ni на входе образцового ЦАП результат преобразования АЦП Ni' в статическом режиме его работы (при tзд >> tпр) записывается в запоминающий регистр ЗРг2 и затем сравнивается с текущим результатом преобразования АЦП Ni' при уменьшении tзд. В момент времени, когда выходной сигнал AN устройства сравнения кодов превысит допустимую погрешность преобразования, уменьшение временной задержки t зд устройством управления УУ прекращается и производится регистрация ее значения tзд=tпр= =nδt=KNx, т. е. время преобразования tпр пропорционально входному коду Nx программируемой линии задержки.
. Для этого при управляющем коде Ni на входе образцового ЦАП результат преобразования АЦП Ni' в статическом режиме его работы (при tзд >> tпр) записывается в запоминающий регистр ЗРг2 и затем сравнивается с текущим результатом преобразования АЦП Ni' при уменьшении tзд. В момент времени, когда выходной сигнал AN устройства сравнения кодов превысит допустимую погрешность преобразования, уменьшение временной задержки t зд устройством управления УУ прекращается и производится регистрация ее значения tзд=tпр= =nδt=KNx, т. е. время преобразования tпр пропорционально входному коду Nx программируемой линии задержки.
Для преобразователей, не использующих команду внешнего запуска и не формирующих сигнал окончания цикла преобразования, время преобразования tпр определяют путем измерения минимального временного интервала между моментами подачи ступенчатого входного сигнала АЦП и выдачи сигнала преобразования, находящегося в пределах допустимых значений. Единственное отличие схемы, обеспечивающей контроль tпр таких АЦП, от предыдущей состоит в том, что момент начала преобразования совпадает с моментом подачи через ключ К (показанный на рис. 10 пунктиром), управляемый импульсом запуска генератора Г, входного воздействия с ЦАП на контролируемый АЦП. Сложность реализации такой схемы, особенно для контроля быстродействующих АЦП, заключается в высоких требованиях к параметрам формируемого ключом входного воздействия АЦП, время достижения которым номинального значения должно быть много меньше времени преобразования контролируемого АЦП. Регистр ЗРг2, запоминающий результат преобразования АЦП в статическом режиме, позволяет исключить статическую погрешность ключа (в том числе его временную нестабильность) и тем самым значительно уменьшить требования к параметрам входного сигнала АЦП.
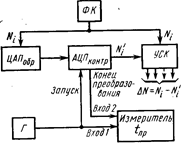
Схема устройства измерения времени преобразования tпр тактируемых АЦП (рис. 11), в которых начало преобразования совпадает с моментом поступления импульса запуска (синхронизирующего импульса), отличается от предыдущих схем тем, что частота fг тактовых импульсов генератора Г возрастает до момента превышения результатом преобразования контролируемого АЦП допустимого значения, после чего с помощью устройства измерения частоты Ч производят измерение частоты тактовых импульсов, определяющих время преобразования: tnp=n/fr, где п— число тактов уравновешивания за один цикл измерения, зависящее от разрядности контролируемого АЦП.
В данной главе были рассмотрены основные структуры ИМС АЦП, параметры и методы их контроля. Проведенный анализ методов контроля позволяет сделать вывод, что наиболее универсальным является метод, использующий образцовый ЦАП, на базе которого возможно построение автоматизированного КИО для проверки как ЦАП, так и АЦП. Среди контролируемых параметров наибольшую сложность с точки зрения обеспечения их контроля представляют нелинейность характеристики преобразователей и их время преобразования. В первом случае требуется образцовый преобразователь с высокой разрешающей способностью и линейностью, во втором — широкополосный усилитель и быстродействующий стробируемый дискриминатор
 |
 уровней с высокой чувствительностью по амплитуде. Все это свидетельствует о том, что создание автоматизированного КИО для ИМС АЦП является очень сложной научно-технической проблемой. Непрерывное совершенствование параметров выпускаемых ИМС АЦП, повышение их разрешающей способности, быстродействия требуют дальнейшего совершенствования существующих и разработки новых методов и средств контроля. Появление преобразователей с числом разрядов 16 и более вызывает необходимость создания КИО, которое по точностным характеристикам приближается к эталонным средствам. Обеспечение достоверного контроля подобных преобразователей становится возможным лишь в случае создания КИО, в котором для получения результата измерения широко используется вычислительная техника, позволяющая проводить статистическую обработку результатов отсчета, вводить дополнительные коррекции и т. д. При этом желаемый результат может быть достигнут, если КИО работает на специально оборудованном метрологическом участке, исключающем воздействие на него различных внешних дестабилизирующих факторов.
уровней с высокой чувствительностью по амплитуде. Все это свидетельствует о том, что создание автоматизированного КИО для ИМС АЦП является очень сложной научно-технической проблемой. Непрерывное совершенствование параметров выпускаемых ИМС АЦП, повышение их разрешающей способности, быстродействия требуют дальнейшего совершенствования существующих и разработки новых методов и средств контроля. Появление преобразователей с числом разрядов 16 и более вызывает необходимость создания КИО, которое по точностным характеристикам приближается к эталонным средствам. Обеспечение достоверного контроля подобных преобразователей становится возможным лишь в случае создания КИО, в котором для получения результата измерения широко используется вычислительная техника, позволяющая проводить статистическую обработку результатов отсчета, вводить дополнительные коррекции и т. д. При этом желаемый результат может быть достигнут, если КИО работает на специально оборудованном метрологическом участке, исключающем воздействие на него различных внешних дестабилизирующих факторов.