КУРСОВОЙ ПРОЕКТ
на тему:
«Электрооборудование мостового крана марки ТКРАН»
Студент: Карпаев П.В.
Руководитель: Антонов В.А.
Москва, 2018
ДЕПАРТАМЕНТ ОБРАЗОВАНИЯ ГОРОДА МОСКВЫ
ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ПРОФЕССИОНАЛЬНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ГОРОДА МОСКВЫ
ОБРАЗОВАТЕЛЬНЫЙ КОМПЛЕКС ГРАДОСТРОИТЕЛЬСТВА «СТОЛИЦА»
(ГБПОУ ОКГ «Столица»)
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ
по профессиональному модулю ПМ.01 «Организация
и выполнение работ по эксплуатации и ремонту электроустановок»
по МДК 01.02 «ЭЛЕКТРООБОРУДОВАНИЕ
ПРОМЫШЛЕННЫХ И ГРАЖДАНСКИХ
ЗДАНИЙ»
Тема проекта: «Электрооборудование мостового крана марки ТКРАН»
Студент_______________________________ (П.В. Карпаев)
(подпись) (Ф.И.О.)
Группа 46002-Кз
Курсовой проект выполнил и защитил
с оценкой_________________
«____»_______________2018 г.
Преподаватель (В.А. Антонов)
(подпись)
Москва, 2018
| № строки | Формат | Обозначение | Наименование | Кол | Примечание | |||||||
| Документация текстовая | ||||||||||||
| А4 | Задание на курсовое | |||||||||||
| проектирование | ||||||||||||
| А4 | К 08.02.09.18. 46002-Кз.09.000 ПЗ | Пояснительная записка | ||||||||||
| Документация графическая | ||||||||||||
| А1 | К 08.02.09.18. 46002-Кз.09.001 Э0 | Общий вид крана. | ||||||||||
| Цикл работы. Нагрузочная | ||||||||||||
| Диаграмма привод | ||||||||||||
| Подъема. Характеристики | ||||||||||||
| Двигателя. | ||||||||||||
| А1 | К 08.02.09.18. 46002-Кз.09.002 Э3 | Принципиальная схема | ||||||||||
| Управления крана | ||||||||||||
| Спецификация | ||||||||||||
| К 08.02.09.18.46002-Кз.09.000 СП | ||||||||||||
| Изм. | Лист | № докум. | Подпись | Дата | ||||||||
| Разраб. | Карпаев | Лит. | Лист | Листов | ||||||||
| Пров. | Антонов | К | 4 | 1 | ||||||||
| ГБПОУ ОКГ «Столица» | ||||||||||||
| Н. контр. | ||||||||||||
| Утв. | ||||||||||||
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 ПЗ |
| Разраб. |
| Карпаев |
| Провер. |
| Антонов |
| Н. Контр. |
| Утверд. |
| Пояснительная записка |
| Лит. |
| Листов |
| ГБПОУ ОКГ «Столица» |
Изм.
Лист
№ докум.
Подпись
Дата
Лист
ВВЕДЕНИЕ К 08.02.09.18.46002-Кз.09.000
Мостовые грузоподъемные краны нашли широкое применение в различных сферах производств при проведении различного рода подъемно-транспортных, монтажных и многих других видов работ. При этом в ряде случаев в их работе наблюдается невысокая надежность привода механизма передвижения крана. Это проявляется в перекосе (неперпендикулярности) оси рамы по отношению к рельсовой колее, что приводит к повышенному давлению на нее, быстрому износу реборд опорно-приводных колес, повышению мощности на привод механизма передвижения крана.
Широкое использование в практике машиностроительного производства грузоподъемных технических средств и мостовых подъемных кранов, в частности, требует постоянной модернизации их конструкции и улучшения технико-эксплуатационных показателей.
Грузоподъемные машины служат для погрузочно-разгрузочных работ, перемещения грузов в технологической цепи производства или строительства и выполнения ремонтно-монтажных работ с крупногабаритными агрегатами. Грузоподъемные машины с электрическими приводами имеют чрезвычайно широкий диапазон использования, что характеризуется интервалом мощностей приводов от сотен ватт до 1000 кВт. В перспективе мощности крановых механизмов может дойти до 1500 –2500 кВт.
Мостовые краны в зависимости от назначения и характера выполняемой работы снабжают различными грузозахватными приспособлениями: крюками, грейферами, специальными захватами и т.п. Мостовой кран весьма удобен для использования, так как благодаря перемещению по крановым путям, располагаемым в верхней части цеха, он не занимает полезной площади.
Электропривод большинства грузоподъёмных машин характеризуется повторно - кратковременном режимом работы при большей частоте включения, широком диапазоне регулирования скорости и постоянно возникающих значительных перегрузках при разгоне и торможении механизмов. Особые условия использования электропривода в грузоподъёмных машинах явились основой для создания специальных серий электрических двигателей и аппаратов кранового исполнения. В настоящее время крановое электрооборудование имеет в своём составе серии крановых электродвигателей переменного и постоянного тока, серии силовых и магнитных контроллеров, командоконтроллеров, кнопочных постов, конечных выключателей, тормозных электромагнитов и электрогидравлических толкателей, пускотормозных резисторов и ряд других аппаратов, комплектующих разные крановые электроприводы.
T AAAAAAAAAAAAAAAAAAAAAABbQ29udGVudF9UeXBlc10ueG1sUEsBAi0AFAAGAAgAAAAhADj9If/W AAAAlAEAAAsAAAAAAAAAAAAAAAAALwEAAF9yZWxzLy5yZWxzUEsBAi0AFAAGAAgAAAAhAFLa5bJk BwAAdlUAAA4AAAAAAAAAAAAAAAAALgIAAGRycy9lMm9Eb2MueG1sUEsBAi0AFAAGAAgAAAAhABQs cobhAAAADAEAAA8AAAAAAAAAAAAAAAAAvgkAAGRycy9kb3ducmV2LnhtbFBLBQYAAAAABAAEAPMA AADMCgAAAAA= " o:allowincell="f">
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
В настоящее время грузоподъемные машины выпускаются большим числом заводов. Эти машины используются во многих отраслях народного хозяйства в металлургии, строительстве, при добыче полезных ископаемых, машиностроении, транспорте, и в других отраслях.
Развитие машиностроения, занимающиеся производством грузоподъемных машин, является важным направлением развития народного хозяйства страны.
Изм.
Лист
№ докум.
Подпись
Дата
Лист
1 ОБЩАЯ ЧАСТЬ К 08.02.09.18.46002-Кз.09.000
Описание механизма
Кранами называются грузоподъемные устройства, циклического действия, служащие для вертикального и горизонтального перемещения грузов на большие расстояния. По особенностям конструкций, связанным с назначением и условиями работы, краны разделяются на мостовые, портальные, козловые, башенные и др. В цехах предприятий электромашиностроения наибольшее распространение получили мостовые краны, с помощью которых производится подъем и опускание тяжелых заготовок, деталей и узлов машин, а также их перемещение вдоль и поперек цеха. Вид мостового крана в основном определяется спецификой цеха и его технологией, однако многие узлы кранового оборудования, например механизмы подъема и передвижения, выполняются однотипными для различных разновидностей кранов. На электрических кранах устанавливают электродвигатели, пусковые и регулировочные сопротивления, тормозные электромагниты, контроллеры, защитную, пускорегулирующую, сигнальную, блокировочную и осветительную аппаратуру, конечные выключатели, токосъемники. Питание на кран подается или через троллейные проводники, неподвижно закрепленные на строительных конструкциях, и токосъемники, закрепленные на кране, или при помощи гибкого шлангового кабеля. Электродвигатели, аппараты и электропроводку кранов монтируют в исполнении, соответствующем условиям окружающей среды [1].
Двухбалочный мостовой кран марки ТКРАН это оптимальный выбор при работах с большими нагрузками. Предназначается для подъема и перемещения различных грузов в производственных и складских помещениях. Как и все мостовые краны производства ТЗГПМ они универсальны.
Мостовой двухбалочный кран представляет из себя две пролетные балки коробчатого сечения образующие мост опирающийся на концевые балки, на которых расположен привод, образующий механизм передвижения крана мостового. В отличие от мостового крана однобалочного в двухбалочных кранах присутствует крановая тележка оснащенная приводом передвижения вдоль главных балок, а также основным и вспомогательным подъемом. На тележку кранов мостовых двухбалочных может устанавливаться стационарная таль или лебедка развернутого типа(электродвигатель, редуктор, тормоз, барабан).
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
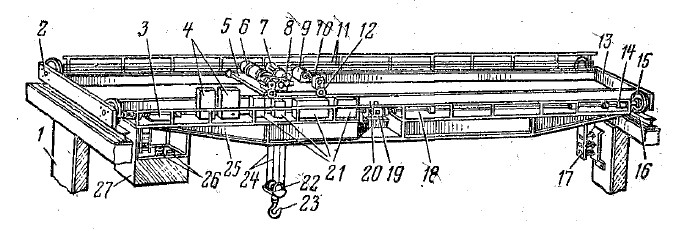
Рисунок 1 - Внешний вид мостового крана.
На рисунке 1 показан общий вид нормального (крюкового) мостового крана. Несущая сварная конструкция крана представляет собой мост с двумя главными балками 25 коробчатого сечения (или с решетчатыми фермами), перекинутыми через пролет цеха, и концевыми балками 12 и 13, на которых установлены ходовые колеса 15.Колеса перемещаются по рельсам 16 подкранового пути, закрепленным на балках опорных конструкций 1 в верхней части цеха. Привод ходовых колес осуществляется от электродвигателя 19 через редуктор 14 и трансмиссионный вал 18. Вдоль моста проложены рельсы 20, по которым на колесах 12, (приводимых во вращение электродвигателем 9 через редуктор 16), перемешается тележка 5 с подъемной лебедкой. На барабан 6 лебедки наматываются подъемные канаты 24 с подвешенным к ним на блоках 22 крюком 23 для захвата грузов. Барабан приводится во вращение электродвигателем 7 через редуктор ·8. Управление работой механизмов крана производится из кабины 27 оператора-крановщика, в которой установлены контроллеры или командоконтроллеры 26 органы ручного управления электроприводами механизмов. Электроаппаратура управления приводами размещается в шкафах 4, установленных на мосту крана. Здесь же располагаются ящики резисторов 21. Для. проведения операций обслуживания механизмов и электрооборудования предусмотрен выход на мост из кабины через люк 3. Электроэнергия к крану подводится при помощи скользящих токосъемников от главных троллеев 17, уложенных вдоль подкранового пути. Для подвода питания к электрооборудованию, размещенному на тележке 5, служат вспомогательные троллеи 11, и идущие вдоль моста.
Мостовой кран состоит из моста, выполненного из главных (продольных) балок перекинутых через пролёт цеха, коробчатого сечения (или с решётчатыми фермами) и концевых(поперечных) балок, на которых установлены буксы с ходовыми колёсами, которыми кран упирается на подкрановые пути. Подкрановые пути расположены на опорных колоннах. что позволяет крану обслуживать практически всю площадь цеха и не занимать полезную площадь пола цеха. Рельсы подкрановых путей соединены между собой и заземлены. Движение 4 kv4AAADhAQAAEwAAAAAAAAAAAAAAAAAAAAAAW0NvbnRlbnRfVHlwZXNdLnhtbFBLAQItABQABgAI AAAAIQA4/SH/1gAAAJQBAAALAAAAAAAAAAAAAAAAAC8BAABfcmVscy8ucmVsc1BLAQItABQABgAI AAAAIQCpaf5kbgcAAJNVAAAOAAAAAAAAAAAAAAAAAC4CAABkcnMvZTJvRG9jLnhtbFBLAQItABQA BgAIAAAAIQAULHKG4QAAAAwBAAAPAAAAAAAAAAAAAAAAAMgJAABkcnMvZG93bnJldi54bWxQSwUG AAAAAAQABADzAAAA1goAAAAA " o:allowincell="f">
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
Краны мостовые двухбалочные изготавливаются со стандартными 4,5; 7,5; 10,5; 16,5;18 22,5; 24; 28,5; 32 метров или любой другой длины в зависимости от конкретного расстояния между рельсами кранового пути. Высота подъема груза в целом зависит только от высоты помещения и соответственно высоты установления подкрановых путей внутри помещения в котором установлен мостовой кран.
Мостовой двухбалочный кран может быть оснащен двумя типами токоподвода.
Кабельный токоподвод гирляндного типа представляет из себя систему передвижения силовых кабелей обеспечивающие подачу тока к механизмам передвижения.
Троллейный токоподвод состоит из медных жил заключенные в жесткий корпус и подвижного токосъемника(троллея) обеспечивающий постоянный контакт с силовой линией.
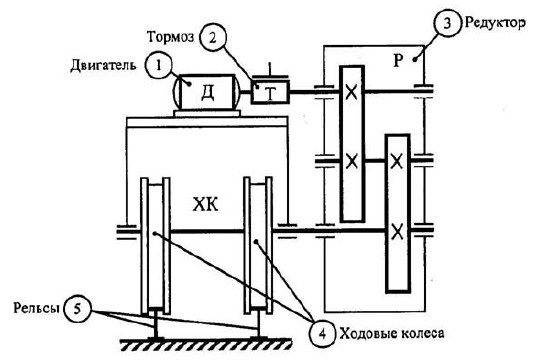
Рисунок 2 - Кинематическая схема механизма передвижения тележки.
h AQAAEwAAAAAAAAAAAAAAAAAAAAAAW0NvbnRlbnRfVHlwZXNdLnhtbFBLAQItABQABgAIAAAAIQA4 /SH/1gAAAJQBAAALAAAAAAAAAAAAAAAAAC8BAABfcmVscy8ucmVsc1BLAQItABQABgAIAAAAIQCM aRbnaAcAAJNVAAAOAAAAAAAAAAAAAAAAAC4CAABkcnMvZTJvRG9jLnhtbFBLAQItABQABgAIAAAA IQAULHKG4QAAAAwBAAAPAAAAAAAAAAAAAAAAAMIJAABkcnMvZG93bnJldi54bWxQSwUGAAAAAAQA BADzAAAA0AoAAAAA " o:allowincell="f">
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
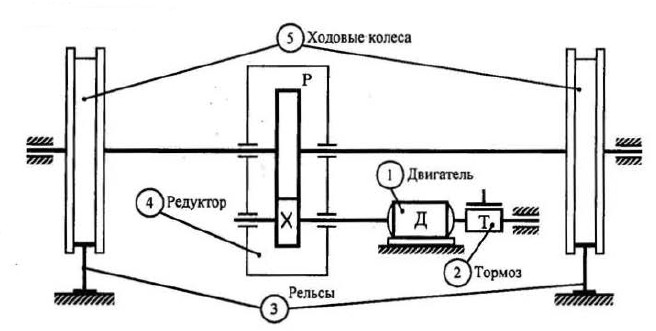
Рисунок 3 - Механизм передвижения моста.
Передвижение моста (несущей конструкции) осуществляется по рельсам подкранового пути, вдоль пролета цеха. К концевым балкам устанавливаются ходовые колеса (5), которые движутся по рельсам (3). Привод колес от ЭД (1) с тормозом (2) через редуктор (4) может быть раздельным или общим. Скорость передвижения моста номинальная- от 2,0 до 2,3 м/с.
Так как длина моста равна 18 метров, применяем однодвигательный привод.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
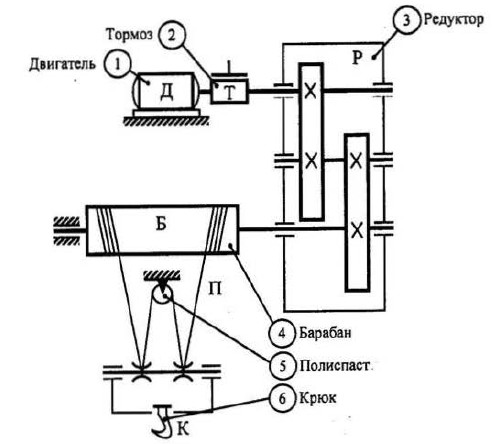
Рисунок 4 - Механизм подъёма.
Механизм подъема представляет собой подъемную лебедку барабанного типа. Барабан лебедки (4) с намотанным на него канатом приводится во вращение двигателем (1) с тормозом (2) через редуктор (3). К канату крепится грузозахватывающее устройство - крюк (6). Для механизмов подъема наибольшее применение получили полиспасты (5), которые передают движение от барабана (4) к крюку (6).
2 РАСЧЕТНАЯ ЧАСТЬ
2.1 Выбор расчётного режима работы
При работе крана направления движения крана, тележки и крюка постоянно чередуются. Работа механизма подъема состоит из периодов подъема и опускания груза и периодов подъема и опускания пустого крюка. Для увеличения производительности крана используют совмещение операций, например, одновременное передвижение крана и тележки. Во время навешивания груза на крюк и освобождения крюка двигатель отключен, и механизм подъема не работает.
Для кранов общего назначения «Правилами Госгортехнадзора» установлены режимы работы: легкий, средний, тяжелый, весьма тяжелый. Для каждого механизма режим работы определен отдельно, для крана в целом – по механизму главного подъема.
Для проектирования принимаем Средний режим (С) характеризуется работой с различными грузами на средних скоростях движения, со средним числом включений в течение одного часа, средней относительной продолжительностью включения. В этом режиме работают, например, механизмы подъема и передвижения кранов формовочных отделений, механических и сборочных цехов со среднесерийным производством и ремонтно-механических цехов.
Рассматриваем как наиболее вероятный следующий цикл работы крана:
1) Загрузка (закрепление груза).
2) Подъём максимального груза с минимальной скоростью.
3) Перемещение груза на половину длины цеха с минимальной скоростью.
4) Спуск с минимальной скоростью.
5) Разгрузка.
6) Подъём пустого грузозахватывающего устройства с максимальной скоростью.
7) Быстрое перемещение крана обратно.
8) Спуск пустого грузозахватывающего устройства с максимальной скоростью.
S /gAAAOEBAAATAAAAAAAAAAAAAAAAAAAAAABbQ29udGVudF9UeXBlc10ueG1sUEsBAi0AFAAGAAgA AAAhADj9If/WAAAAlAEAAAsAAAAAAAAAAAAAAAAALwEAAF9yZWxzLy5yZWxzUEsBAi0AFAAGAAgA AAAhAM3xq01tBwAAk1UAAA4AAAAAAAAAAAAAAAAALgIAAGRycy9lMm9Eb2MueG1sUEsBAi0AFAAG AAgAAAAhABQscobhAAAADAEAAA8AAAAAAAAAAAAAAAAAxwkAAGRycy9kb3ducmV2LnhtbFBLBQYA AAAABAAEAPMAAADVCgAAAAA= " o:allowincell="f">
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
Рассчитаем мощность при подъёме максимального груза с минимальной скоростью
где: GН – номинальная грузоподъёмность крана, тн;
G0 – масса грузозахватывающего устройства, тн;
VП. МИН. – минимальная скорость подъёма граза, м/с;
 н – номинальный КПД механических передач привода подъёма.
н – номинальный КПД механических передач привода подъёма.
Скорость спуска считаем примерно равной скорости подъёма. Находим мощность при спуске максимального груза:


Рассчитывая мощности при подъеме и спуске пустого грузозахватывающего
устройства, необходимо учесть снижение КПД при неполной загрузке механизма подъёма. Коэффициент загрузки при этом равен:

В зависимости от этого коэффициента и номинального значения КПД по кривым находим значение КПД при неполной загрузке ηо = 0,4.
Находим мощность подъёма пустого грузозахватывающего устройства, кВт:

Рассч
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |


Для упрощения построения нагрузочной диаграммы и дальнейших расчётов времена будем выражать в минутах.
Времена подъёма и спуска максимального груза, мин.

Времена подъёма и спуска пустого грузозахватывающего устройства, мин.


Времена перемещения крана с грузом на половину длины цеха и возвращения крана обратно без груза равны соответственно, мин.
Времена перемещения тележки с грузом на длину моста и возвращения крана обратно без груза равны соответственно, мин.
 мин
мин
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |

2.3 Построение нагрузочной диаграммы
Статическая нагрузочная диаграмма, рассчитанная по исходным данным и формулам строится в соответствующем масштабе и представлена на рисунке 5.
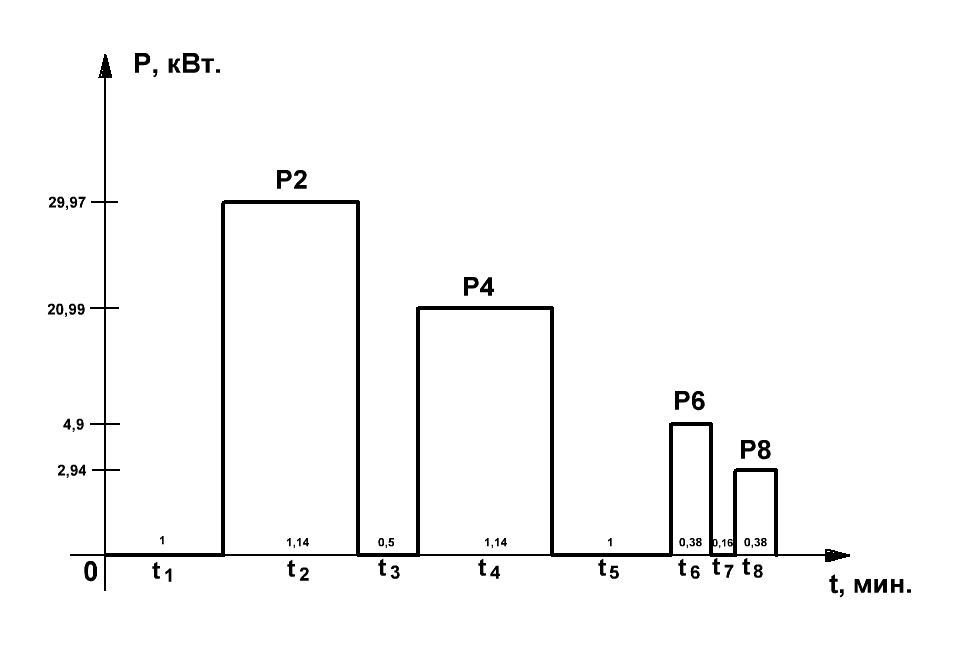
Рисунок 5 - Нагрузочная диаграмма двигателя за цикл работы
Выбор двигателя по мощности имеет целью обеспечить его нормальную работу без перегрузки (перегрева). Основой для выбора является нагрузочная диаграмма. Она рассчитывается и строится для наиболее характерного режима работы механизма. После её построения и обработки выбор двигателя выполняем методом эквивалентной
мощности.
h AQAAEwAAAAAAAAAAAAAAAAAAAAAAW0NvbnRlbnRfVHlwZXNdLnhtbFBLAQItABQABgAIAAAAIQA4 /SH/1gAAAJQBAAALAAAAAAAAAAAAAAAAAC8BAABfcmVscy8ucmVsc1BLAQItABQABgAIAAAAIQD5 jA5ZaAcAAJNVAAAOAAAAAAAAAAAAAAAAAC4CAABkcnMvZTJvRG9jLnhtbFBLAQItABQABgAIAAAA IQAULHKG4QAAAAwBAAAPAAAAAAAAAAAAAAAAAMIJAABkcnMvZG93bnJldi54bWxQSwUGAAAAAAQA BADzAAAA0AoAAAAA " o:allowincell="f">
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
Из нагрузочной диаграммы известны мощности и времена на её отдельных участках. Так как кратковременные периоды работы двигателя чередуются с паузами и время цикла работы не превышает 10 минут, режим его работы является повторно-кратковременным (S3).
Рассчитаем время работы двигателя, мин.:

Рассчитаем время паузы, мин.:


Найдём общее время цикла работы, мин:

Определим фактическую продолжительность включения:
ПВФ = 

Выбор и проверка двигателя
Основной величиной, по которой выбирают двигатель, является мощность. Так как нагрузка двигателя и его нагрев различны по этапам работы, выбор осуществляем по эквивалентной мощности.
Рассчитаем эквивалентную (по теплу, по нагреву) мощность для тех периодов рабочего цикла, когда двигатель работает, мин.:
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |

Так как двигатели повторно-кратковременного режима выпускаются только на определенные, стандартные продолжительности включения, для правильного учёта
фактического режима двигателя нужно пересчитать полученную эквивалентную мощность к стандартной продолжительности включения и номинальную мощность двигателя выбирать уже по ней. Номинальная продолжительность включения двигателей по Табл. 2 равна 25%. Выполняем пересчёт мощности к ПВн и выбираем двигатель на пересчитанную мощность, кВт:
Выбираем двигатель типа МТН412-6 с мощностью Рн = 34 кВт ≥ РЭ, = 31,64 кВт.
с данными:
1) номинальная частота вращения nН = 695 об/мин.;
2) перегрузочная способность λ = 2,3;
3) номинальный ток статора IC Н = 82 А;
4) номинальный ток ротора IР Н = 81 А;
5) сопротивление фазы ротора rP = 0,124 Ом
Двигатель, выбранный по нагреву (теплу) должен быть проверен по механической перегрузке. Найдём фактическую перегрузку двигателя для самого загруженного этапа (Р2):


Рассчитаем допустимую перегрузку двигателя:
pд = 0,8  λ
λ
pд = 0,8 2,3 = 1,84
Так как фактическая перегрузка не превосходит допустимую, двигатель выбран верно.
h ALaDOJL+AAAA4QEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5cGVzXS54bWxQSwECLQAU AAYACAAAACEAOP0h/9YAAACUAQAACwAAAAAAAAAAAAAAAAAvAQAAX3JlbHMvLnJlbHNQSwECLQAU AAYACAAAACEAvQOvunIHAACTVQAADgAAAAAAAAAAAAAAAAAuAgAAZHJzL2Uyb0RvYy54bWxQSwEC LQAUAAYACAAAACEAFCxyhuEAAAAMAQAADwAAAAAAAAAAAAAAAADMCQAAZHJzL2Rvd25yZXYueG1s UEsFBgAAAAAEAAQA8wAAANoKAAAAAA== " o:allowincell="f">
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
Расчёт и построение характеристики асинхронного двигателя выполняется по отдельным точкам. Находим синхронную скорость (ближайшую большую nН - номинальной скорости выбранного двигателя из ряда синхронных скоростей - 3000; 1500; 1000; 750; 600; 500... об/мин.)
nо = 750 об/мин.
Рассчитываем номинальное скольжение:

Рассчитываем критическое скольжение:

Определяем номинальный и критический момент, Нм:


Находим скорость, соответствующую критическому моменту, об/мин.:

Затем через точки Х, Н и К с координатами (0; 1000 об/мин.); (360 Нм; 750 об/мин.) и (1074 Нм; 510 об/мин.) проводим плавная кривая (через точку К – вертикально) – Рис. 4.
 Рисунок 6 – Естественная механическая характеристика
асинхронного двигателя
Рисунок 6 – Естественная механическая характеристика
асинхронного двигателя
|
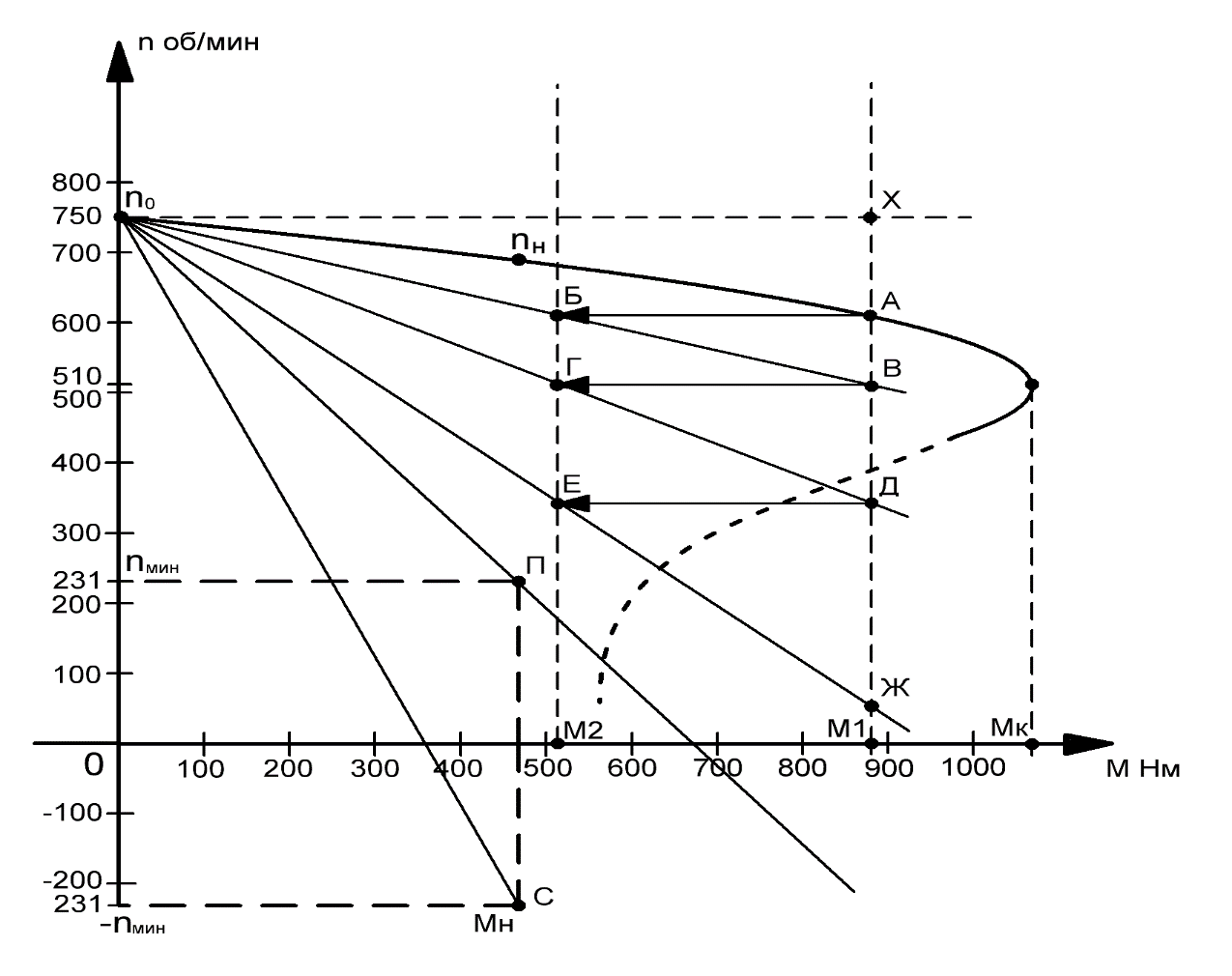
Для построения пусковой диаграммы рассчитываем максимальный (М1) и минимальный (М2) моменты, Нм:
Проводим на графике (Рис. 7) соответствующие вертикальные линии. Из точки А (на пересечении естественной характеристики с линией М1) проводим влево горизонтальную линию А – Б (до точки Б на пересечении с линией М2).
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
Рисунок 7 – Пусковая диаграмма
Из точки n0 через точку Б проводим прямую (реостатную характеристику)
n0 – Б – В до точки В (на пересечении с линией М1) и т. д. до точки Ж.
В результате построения получено три реостатных характеристики: nо – Б – В;
nо – Г – Д и nо – Е – Ж.
Для обеспечения работы на пониженной скорости (спуск и подъём тяжёлых грузов –нужны ещё две характеристики. Их проводим на той же диаграмме (Рис. 7) через точку nо и точки П (МН; nмин) и С (МН; – nмин). Для этого рассчитывают величины соответствующих скоростей двигателя привода подъёма об/мин.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
Для получения трёх реостатных характеристик нужны три ступени резисторов в каждой фазе.
Проводим горизонтальную линию nо – Х. Измеряем в миллиметрах длину отрезков (Х – А); (А – В); (В – Д) и (Д – Ж), вычисляем сопротивления (по ступеням), Ом:
R3 = rP 
 ;
;
R2 = rP  ;
;
R1 = rP 
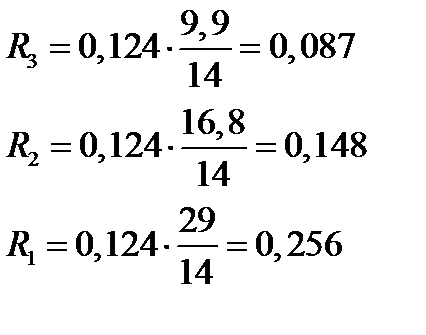
Для расчёта сопротивления соответствующих дополнительных резисторов в этом случае две последние (нижние) характеристики и вертикальную линию М1 нужно продлить вниз до пересечения. Формулы для расчёта R4 и R5 – аналогичны.
Находим общее сопротивление резисторов одной фазы, Ом:
Rобщ. = R3 + R2 + R1 + R4 + R5;

Так как резисторы являются пускорегулировочными (работают в продолжительном
режиме) и включаются в роторные цепи, выбираем их на ток, больший тока ротора:
Выбираем ящики типа ЯС4 – 0,5 с длительным током:
Iдл. = 91 А ≥ Iн.р. = 81 А
Данные ящика:
1) длительный ток IДЛ = 91 А;
2) сопротивление ящика RЯ, = 0,5 Ом;
3) количество элементов nЭЛ = 5.
Найдём общее количество ящиков:
NЯЩ ≈ 
Nящ. ≈  = 8,4
= 8,4
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| К 08.02.09.18.46002-Кз.09.000 |