Система ДАУ AFАI фирмы «Шифсэлектроник» (Германия) предназначена для автоматизации процессоров управления судовой силовой установкой (ССУ) с двухдвигательным дизель-редукторным агрегатом (ДРА) и винтом регулируемого шага (ВРШ) (рис. 9.5.).
В состав ДРА входят главные двигатели ГД1, ГД2, которые с помощью пневматических муфт ПМ1 и ПМ2 подключаются к раздаточному редуктору Р.
Отбор мощности с раздаточного редуктора осуществляется на ВРШ для обеспечения движения судна (линия валопровода гребного вала подключается с помощью ПМ3), а также на валогенератор постоянного тока ВГ1 для снабжения электроэнергией электродвигателей ваерной лебедки посредством зубчатой муфты (М4) и валогенератор переменного тока ВГ2 для снабжения электроэнергией судовой электростанции посредством упругой кулачковой муфты М5. Для затормаживания гребного вала в режиме дрейфа судна при отключенной муфте ПМ3 на ряде судов установлен гидравлический тормоз вала (ГТВ).

Рисунок 9.5. Схема силовой установки СТМ «Атлантик 333»
В системе ДАУ предусмотрены три поста управления: командный пост управ-ления судном (ПУС) в рулевой pyбкe; пост дистанционного управления на пульте вахтенного механика (ПВМ) в ЦПУ; пост управления в МО.
Система ДАУ АFАI реализует следующие функции управления ССУ:
1) дистанционный пуск и остановка Г Д 1 и Г Д2 с поста на ПВМ в ЦПУ;
2) дистанционное управление муфтами главных двигателей ПМ1 и ПМ2 с поста на ПВМ, а также с местного поста в МО;
3) дистанционное управление муфтой гребного вала ПМ3 и ГТВ с поста на ПВМ и командного поста на ПУС, а также дистанционное управление ПМ3 с местного поста в МО;
4) дистанционное регулирование частоты вращения с помощью серводви-гателей реrулятора частоты вращения (РЧВ) с трех постов:
· ПВМ в режиме раздельного регулирования частоты вращения в диапазоне 100-90 % с целью равномерного распределения нагрузки между Г Д1 и Г Д2;
· местного поста в МО в режиме раздельного регулирования частот вращения в диапазоне 100-50 %;
· секции управления ГРШ в режиме совместного регулирования частоты вращения Г Д 1 и Г Д2 в диапазоне 100-90 % для подгонки частоты валогенератора.
5) дистанционное управление с ПУС рулевой рубки шагом ВРШ посредством гидравлического МИШ следящего типа;
6) дистанционное аварийное управление шагом ВРШ и с ПВМ при помощи гидросистемы запасного управления МИШ;
7) автоматическая разгрузка ГД путем уменьшения шага ВРШ при возникновении перегрузки Г Д в режиме с работающим валогенератором;
8) автоматическое ограничение установленной нагрузки ГД в пределах 100 -65 % путем ограничения подачи топлива и понижения шага ВРШ;
9) экстренная остановка ГД1, ГД2 и автоматическое отключение соответствующих муфт ПМ 1, ПМ 3 или ПМ 2, ПМ 3 с ПВМ в ЦПУ;
10) автоматическая защита каждого из ГД путем аварийной остановки дизеля по предельной частоте вращения и аварийному давлению масла в системе смазки с автоматическим отключением по регулировке соответствующих пневматических муфт сцепления;
11) автоматическая защита муфт сцепления ПМ1 и ПМ2 и раздаточного редуктора путем аварийного отключения соответствующей муфты по трем параметрам:
· низкое давление рабочего воздуха в пневмосистеме муфты;
· аварийное давление масла в системе смазки редуктора;
· исчезновение напряжения на шинах судовой сети;
12) автоматическая защита муфты гребного вала ПМ3 и упорного подшипника путем аварийного отключения муфты по трем параметрам:
· низкое давление рабочего воздуха в пневмосистеме муфты;
· аварийное давление масла в системе смазки упорного подшипника;
· исчезновение напряжения на шипах судовой системы сети.
В экстренных ситуациях предусмотрено принудительное отключение (блокировка) защиты по аварийному давлению смазки ГД с помощью переключателя и кнопки с фиксацией, которые установлены на ПВМ и ПУС.
Контуры дистанционного управления ГД1 и ГД2 обеспечивают автоматизированный пуск и остановку двигателей с ПВМ в ЦПУ.(см.рис.9.6.) Схемы контуров управления ГД1 и ГД2 идентичны. Маркировка элементов, приведенная на рис. 9.6. в скобках, соответствует схеме контура управления ГД2. При отработке команды «Пуск» автоматически выполняются следующие операции:
· включение РМН,обеспечивающего предпусковую прокачку смазочного масла;
· включение пульсирующего свечения сигнальной лампы ЛР «Работа ГД » на ПВМ;
· включение подачи пускового воздуха и топлива (включение КПВ и ПКТ) при достижении давлением предпусковой прокачки масла уровня 0,1 МПа;
· фиксация успешного запуска - отключение пусковых устройств (РМН, КПВ, ПКТ) и переключение сигнальной лампы ЛР на постоянное свечение при достижении пусковой частоты вращения n > 25 %;
· отключение пусковых устройств и включение сигнальной лампы ЛНП («Неудачный пуск») при невыполнении указанных выше условий нормального запуска:
- если в течение 60с работы РМН давление предпусковой прокачки масла не достигнет уровня 0,1 МПа;
- если за 5с (пуск ГД сжатым воздухом) дизель не развивает пусковой частоты вращения > 25 %.
Фиксация состояния «Неудачный пуск» блокирует исполнение последующих кнопочных команд пуска. Снятие блокировки пуска и сброс сигнала «Неудачный пуск» происходят при нажатии кнопки «Стоп». При дистанционной оперативной остановке ГД (отработке команды «Стоп») автоматически выполняются следующие операции:
· закрытие подачи топлива включением ОСУ РЧВ;
· блокировка исполнения команды «Пуск», а также включения муфты ГД ПМ1 (ПМ2) на время остановки двигателя;
· отключение сигнальной лампы ЛР при снижении частоты вращения ГД и достижения уровня n = 0,9 c-1;
· отключение ОСУ, снятие блокировок и приведение схемы в состояние готовности к пуску через 25с после достижения частоты вращения п<0,9 c-1.
Сигналы контактных датчиков, преобразованные через контакты промежуточных реле РШ, используются для проверки выполнения условий разрешения дистанционного пуска (остановки) ГД:
1) рычаг управления на дизеле установлен в положение «Работа» (замкнут конечный выключатель рычага КВР);
2) переключатель режима управления ГД на КП1 в МО установлен в положение «Дистанционное управление» ДУ;
3) муфта ГД отключена (разомкнут конечный выключатель муфты КВМ);
4) валоповоротное устройство (ВПУ) расцеплено (замкнут конечный выключатель КВ).
По первым двум условиях цепью контактов соответствующих промежуточных реле 2-6 К2, 2-6 К3 формируется общий сигнал режима.«Дистанционное управление ГД ». Невыполнение четвертого условия приводит к блокировке включения исполнительного реле 3-20 К2 управления КПВ. Датчик предпусковой прокачки масла (ДППМ) (установка срабатывания 0,1 МПА) предназначен для формирования сигналов включения КПВ, ПКТ, а также контроля прокачки. Приведение логических сигналов уровня 24В к уровню ТТЛ осуществляется с помощью преобразователей уровня 24/5В с оптронной развязкой в модуле 3-17.
Работу схемы управления пуском-остановкой определяют три элемента памяти, реализованных на RS-триггерах в модуле 3-15:
1) память команды «Пуск» (ПКП); установка ПКП происходит при поступлении команды «Пуск», приводит к включению РМН через усилитель с входной логикой «И» 3-3 и реле 9-12 К3, 5-б К2; сброс ПКП производится через схему «ИЛИ» 3-14 при нажатии кнопки «Стоп», достижении пусковой частоты вращения n>25 % или при фиксации состояния «Неудачный пуск»;
2) память команды «Стоп» (ПКС); установка ПКС происходит при поступлении команды «Стоп» и приводит к останову ГД включением ОСУ РЧВ через усилитель 3-3 и реле 9-11 К4, а также к блокировке установки ПКП; сброс ПКС осуществляется автоматически при фиксации состояния «Останов завершен» через 25с после снижения частоты вращения до п<0,9 c-1;
3) память неудачного пуска (ПНП); установка ПНП производится при неисправностях в системе прокачки масла или системе запуска и приводит к включению через усилитель 3-3 и реле 9-14 К3 сигнальной лампы ЛНП на ПВМ, а также к сбросу и блокировке ПКП, сброс ПКП осуществляется при нажатии кнопки «Стоп».
Рассмотрим работу контура дистанционного управления при нормальном запуске. При выполнении условий дистанционного пуска (если замкнуты контакты реле 2-6 К2. 2-6 К3, 2-16 К1, 2-12 К3. 3-12 К3) и отсутствии блокирующего сигнала «Стоп» нажатием кнопки «Пуск» через элемент «И» 3-14 подается единичный сигнал на вход ПКП. ПКП фиксирует команду «Пуск», подавая единичный сигнал на первый вход усилителя «И» 3-3 (второй вход связан с выходом инвертора 3-15 сигнала п > 25 %), который с помощью реле 9-12 К3, 5-6 К2 включает контактор РМН, обеспечивая предпусковую прокачку смазочного масла.
Одновременно единичный сигнал с выхода ПКП поступает на вход Е1 усилителя со встроенным мультивибратором 3-9, который включает сигнальную лампу ЛР на пульсирующее свечение.
Усилитель 3-9 имеет следующую характеристику переключений:
Е1 Е2 Выход

 0 0 1 (лампа выключена)
0 0 1 (лампа выключена)
1 0 (пульсирующий свет)
 0 1 0 (лампа включена)
0 1 0 (лампа включена)
1 1 0 (лампа включена)
При достижении в системе смазки давления Р = 0,12 МПа срабатывает ДППМ, включая промежуточное реле 3-12 К1, контакты которого подают питание на исполнительное реле 3-20 К2, тем самым подключая напряжение на электромагнит КПВ, а также на делитель напряжения 3-17, который формирует единичный сигнал на входе элемента «И» 3-12. Далее усиленный сигнал включает. исполнительное реле 9-11 К3, подающее питание наэлектромагнит ПКТ. Таким образом, только при срабатывании ДППМ включается подача пускового воздуха и открывается подача топлива, что приводит к запуску дизеля. Запуск дизеля и набор пусковой частоты вращения во всем диапазоне фиксируются блоком контроля частоты вращения, который при достижении двигателем п > 25 % подает в схему единичный сигнал. Поступление этого сигнала на входе контура управления фиксирует состояние «Пуск ГД завершен» и приводит к отключению пусковых устройств. в частности,
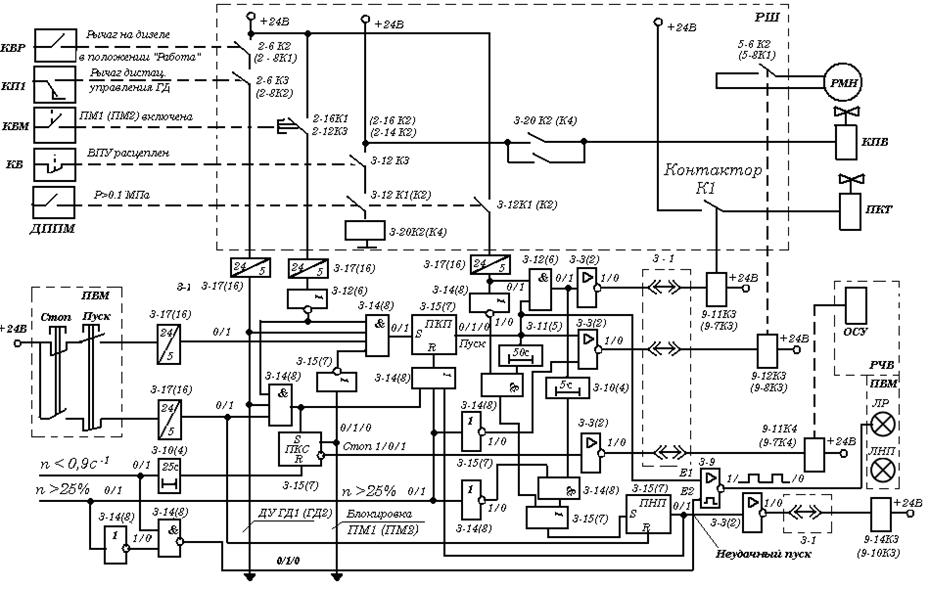
Рисунок 9.6. Схема контура дистанционного управления главным двигателем с ВРШ
единичный сигнал п>25 % инвертируется элементом «НЕ» 3-15, что приводит к снятию входного сигнала с усилителя 3-3, обесточиванию реле 9-12 К3, которое через реле 5-6 К2 отключает РМН.
В результате остановки РМН размыкается контакт ДППН установленного на нагнетательной магистрали насоса, что приводит к обесточиванию реле 3-30 К2, которое отключает КПВ.. Наряду с этим поступление единичного сигнала п>25 % через элемент «ИЛИ» 3-14 на вход ПКП приводит к сбросу единичного выходного сигнала «Пуск». В результате этого происходит отключение ПКТ (цепь элемента «И» 3-12, усилитель 3-3, реле 9-11 К3, контактор К1).
Появление единичного сигнала n>25 % (по цепи элементы «ИЛИ» 3-14, «И» 3-14) изменяет сигнал на Е2 усилителя 3-9, в результате чего лампа ЛР переключается с пульсирующего свечения на постоянное, сигнализируя завершение пуска.
Работа контура дистанционного управления при неудачном пуске. Контроль выполнения пусковых операций осуществляется цепью установки триггера ПНП, которая через элемент «ИЛИ» 3-15 объединяет две контрольные ветви:
1) ветвь контроля прокачки, включающая инвертор сигнала P>0,1 МПа 3-14, элемент задержки времени 50с сигнала «Пуск» 3-11 и выходной элемент «И» 3-14;
2) ветвь контроля запуска, в которую входят инвертор сигнала n>25 % 3-14, элемент задержки времени 5с сигнала ПКТ 3-10 и выходной элемент «И» 3-14.
При нормальном пуске необходимое давление масла P>O,1 МПа достигается за время работы РМН меньшее, чем установка задержки 50с, а запуск дизеля и набор пусковой частоты вращения n>25 % происходит за время, которое меньше, чем установка задержки 5с. В этом случае в процессе пуска не происходит совпадения единичных сигналов на вход элементов 3-14 и триггер ПНП остается в исходном состоянии. Если в результате неисправностей схемы управления исполнительных цепей включения пусковых устройств или дизеля не достигается нормальное давление P>O,1 МПа в течение 50с работы РМП или дизель не запускается и не достигает пусковой частоты вращения n>25 % в течение 5с после включения пускового воздуха и подачи топлива, то единичным выходным сигналом соответствующего элемента «И» 3-14 через элемент «ИЛИ» 3-15 происходит включение триггера ПНП, который фиксирует сигнал «Неудачный пуск».
Единичным сигналом с выхода ПНП с помощью усилителя 3-3 и исполнительного реле 9-14 К3 включается сигнальная лампа ЛНП. Одновременно выходной сигнал ПНП приводит в исходное состояние ПКП, чем снимается сигнал команды «Пуск» и тем самым производится отключение пусковых устройств. Кроме того, сигналом ПНП блокирует включение ПКП. Снятие блокировки происходит в результате сброса ПНП нажатием кнопки «Стоп». После этого возможен повторный пуск Г Д.
Работа контура дистанционного управления в peжиме остановки ГД. Условиями выполнения команды остановки ГД, если выполнены условия команды «Пуск», является нажатие кнопки «Стоп». При этом через элемент «И» 3-14 подается единичный сигнал на выход установки ПКС. ПКС переключается, фиксируя поступление команды «Стоп». Одновременно сигнал установки ПКС поступает на вход сброса R ПКП, сбрасывая его в исходное состояние, если подача команды «Стоп» происходит в период исполнения команды «Пуск». Кроме того, единичный сигнал прямого выхода ПКС с помощью инвертора 3-15 блокирует исполнение ПКП команды «Пуск» на период остановки ГД. Одновременно этим же сигналом, поступающим в контур управления муфтой ГД, производится блокировка включения муфты ПМ1 (ПМ2) до завершения остановки дизеля.
Нулевой сигнал «Стоп», поступая с инверсного выхода ПКС на усилитель 3-3, включает с помощью реле 9-11 К4 электромагнит ОСУ, устанавливающий РЧВ на нулевую подачу топлива, что приводит к остановке ГД. В завершающей стадии остановки ГД производится операция снятия команды «Стоп» и приведения схемы управления в исходное состояние готовности к пуску. После снижения частоты вращения ГД до п < 0,9 с-1 на выход Е2 усилителя 3-9 поступает нулевой сигнал, отключающий сигнальную лампу ЛР на ПВМ. Единичный сигнал, соответствующий 0,9 c-I, поступая на выход элемента задержки 3-10, через 25с сбрасывает ПКС в исходное состояние, снимая команду «Стоп», что приводит к снятию блокировки ГД и отключению ОСУ.
На период пуска и остановки ГД в контур защиты подаются сигналы, блокирующие действие защиты по низкому давлению смазочного масла ГД. Регулирование скорости движения судна осуществляется за счет изменения упора винта, реализуемого изменением угла атаки ВРШ. Автоматизированное управление ВРШ, которое осуществляется с учетом нагрузки ГД, обеспечивается совместной работой контура следящего управления ВРШ (см.рис.9.7.), где управляемой величиной является шаг винта, и контура регулирования нагрузки ГД (см.рис.9.8.).
Контур управления ВРШ для основного режима управления построен в виде электронной следящей системы автоматического управления с обратной связью по управляемой величине - шагу винта Н.
В состав следящей системы управления шагом входят следующие элементы:
· потенциометрический задатчик шага (3Ш) объединенного поста задания команд машинного телеграфа на ПУС ходовой рубки; снимаемое напряжение Uзш пропорциональное углу разворота рукоятки управления машинного телеграфа, поступает в качестве задающего сигнала в следующую систему: (см. рис. 9.7);
· блок формирования сигнала заданного шага Нз (элементы 6-4, 6-5, 6-7, 6-10, 6-11, 6-12, 6-14), обеспечивающий плавное изменение задающего сигнала НЗ с ограниченной скоростью, не зависящий от скорости перекладки рукоятки управления, а также фиксацию или уменьшения сигнала задания шага НЗ, которое происходит при срабатывании защиты от перегрузки главного двигателя или валогенераторов и поступает с входа блока формирования аналогового сигнала понижения шага (см.рис.9.8)
· модулятор М в составе двух модулей 6-16, 6-17, предназначенный для преобразования управляющего сигнала постоянного тока в сигнал переменного тока (с промежуточным преобразованием в импульсное напряжение);
· выходной усилитель переменного напряжения - транзисторный усилитель мощности б - 23 (УМ);
· исполнительный механизм - сервопривод (СП) шага, содержащий асинхронный однофазный исполнительный двигатель (ИД), воздействующий на регулировочный вал МИШ. В СП встроены датчики обратных связей следящей системы:
· главной отрицательной обратной связи (ООС) по управляемой величине (шагу H) - потенциометрический ДШ, с которого снимается напряжение Uдш, пропорциональное фактическому значению шага Н;
· вспомогательный ООС по скорости изменения шага dH/dt - тахогенератор переменного тока (ТГ), сигнал которого обеспечивает демпфирование динамического режима работы СП.
Сигналы ООСН и dH/dt вычитаются из сигнала задания шага на входном и выходном сумматорах модулятора М соответственно на постоянном и переменном токе. Напряжения Uзш, Uдш приводятся к номинальному диапазону изменения от -10 до + 10В с помощью масштабирующих усилителей 6-4, 6-15 с коэффициентом усиления 5/6

Рисунок 9.7. Схема контура управления ВРШ.
В этих модулях предусмотрен также узел контроля входного сигнала (КВС), формирующий на выходе логическую единицу при исчезновении входного напряжения. Эти логические сигналы неисправностей 3Ш, ДШ используются в схеме обработки сигналов неисправностей для включения сигнализации, остановки работающего гидронасоса МИШ и блокировки работы СП снятием напряжения питания с обмотки возбуждения (ОВ) ИД исполнительным реле К3 модуля 10-2 ЦШУ.
Аналогичная блокировка СП производится конечным выключателем (КВ) зацепления муфты МРУ при ручной установке шага. Кроме того, отключение гидронасоса МИШ и блокировка СП осуществляются при неисправностях питания рассматриваемых контуров и неисправности ДН, ГД1, ГД2. При остановке гидронасоса гидросистема МИШ запирается специальным клинкетом, тем самым фиксируется установленный шаг ВРШ.
Коммутация напряжения Uз, задаваемого 3Ш, на вход следящей системы производится с помощью переключательного модуля 6-5. Аналоговые ключи К 1, К2 модуля 6-5 так же, как и ключи К3-К6 (см. рис.9.7), ключи в схеме контура регулирования нагрузки (см. рис.9.8), выполнены на МОП-транзисторах. Ключ К 1 подает напряжение задания UЗ на вход нелинейного преобразователя (НП) при установке переключателя постов управления ВРШ на ПВМ в положение «Управление с ПУС». НП предназначен для коррекции напряжения UЗ, которое линейно зависит от угла разворота рукоятки управления, и формирования характеристики, отличающейся разными значениями коэффициента усиления для режимов переднего и заднего хода.
Выходное напряжение НП соответствует фактически требуeмому шагу Н и поступает в качестве задающего сигнала в блок формирования плавно изменяющегося сигнала заданного шага НЗ,. отрабатываемого следящим контуром СП.
Плавное изменение сигнала НЗ с ограниченной скоростью, соответствующей допустимой динамической нагрузочной способности ГД, обеспечивается интегратором заданного шага (И3Ш), выполненным на операционном усилителе (ОУ) с емкостной обратной связью. Контур управления И3Ш представляет собой следящую систему с отрицательной обратной связью по выходному сигналу Нз.
Работой И3Ш управляет сигнал рассогласования ∆Нз = Нз - Ĥз. В схеме ограничителя О рассогласование ∆Нз ограничивается по уровню, что обеспечивает ограничение скорости интегрирования, т. е. скорости изменения сигнала Нз.
Ограниченный сигнал рассогласования поступает на переключатель времени разгона (ПВР), который представляет собой усилитель с двумя ступенями коэффициента усиления, выполненный на базе ОУ с двумя переключаемыми отрицательными обратными связями. Коммутация цепей обратных связей в схеме ПВР осуществляется с помощью МОП-ключей, управляемых логическими сигналами определения режима «Набор хода - сброс хода», которые поступают из блока логики контура регулирования нагрузки ГД (см. рис. 9.8.). Таким образом, при отработке. команд на увеличение шага (набор хода) усилитель ПВР включается на меньшую ступень коэффициента усиления, и, наоборот, при отработке команд на понижение шага (сброс хода) производится переключение коэффициента усиления на более высокую ступень, тем самым обеспечивается повышенная скорость интегрирования и соответственно более высокая скорость понижения шага в режиме сброса хода. Динамический режим работы И3Ш завершается, когда его выходное напряжение НЗ соответствует входному сигналу 3Ш НЗ (рассогласование ∆ Нз = 0).
Сигнал Нз поступает на отработку в следящей контур управления шагом. Работой СП управляет сигнал рассогласования шага ∆Нз = Ĥз – Н. Этот сигнал постоянного тока преобразуется модулятором М в пропорциональное напряжение переменного тока, дополняется на выходе модулятора сигналом гибкой ООС по скорости отработки СП, усиливается транзисторным УМ и в виде напряжения переменного тока поступает на обмотку управления (ОУ) ИД. Гибкая ООС обеспечивает демпфирование процесса отработки рассогласования Н = 0, в результате чего изменение шага происходит достаточно плавно, без перерегулирования и колебаний.
Бесконтактные МОП-ключи К3-К6, установленные во входной схеме ИЗШ, предназначены для управления работой интегратора при отработке команд фиксации или понижения шага, поступающих из контура регулирования нагрузки ГД. Ключ К3 служит для отключения задающего сигнала от входа ИЗШ при достижении установленного предела нагрузки ГД и подачи на вход ИЗШ аналогового сигнала понижения шага δН, что приводит к понижению выходного сигнала интегратора НЗ и соответствующей отработке снижения шага Н. Ключ К4 предназначен для отключения входа ИЗШ, а тем самым фиксации его выходного сигнала НЗ и фактического значения шага, когда величина отрицательного рассогласования нагрузки ГД (разность между текущим значением нагрузки F и ее установленным пределом Fз, причем F < Fз) меньше установленной зоны нечувствительности ∆F. Введение зоны нечувствительности ∆F вниз от уставки предела нагрузки Fз обеспечивает сокращение числа переключений (циклов изменения шага) в режиме работы с переменной нагрузкой ГД. Ключи К5, К6 являются исполнительными элементами понижения шага при срабатывании защиты от перегрузки ГД.
Контур регулирования нагрузки ГД (см. рис.9.8) выполнен в виде системы логического управления работой МОП-ключей блока формирования сигнала заданного шага контура управления ВРШ. Кроме того, в состав контура входит блок формирования аналогового сигнала понижения шага 6Н (6-9, 6-10). Сигнал δН подается на входную цепь ИЗШ (см. рис.9.7) при достижении установленного предела нагрузки или при появлении перегрузки ГД.
На рис. 9.8 предусмотрены два задатчика предельной нагрузки ГД Fз: задатчик постоянного ограничения тропического режима Fз = 95,5 % - резистор R4 модуля 5-10 ЦШУ и задатчик переменного ограничения Fз = 65-100 %, устанавливаемого вахтенным механиком, - резистор Q4, встроенный в КСП2 на ПВМ. На КСП2 установлен также резистор ЗН, с помощью которого можно ввести зону нечувствительности (дифференциал) регулирования нагрузки ∆F = 1 - 10 % вниз от уставки верхнего предела F3..
Сигнал ограничения нагрузки тропического режима F3 = 95,5 % автоматически вводится ключом 5-11 как предельный задающий сигнал F3 в контур регулирования, если резистором Q4 на КСП2 установлен уровень ограничения F3 > 95,5 %, а температура воздуха, засасываемого дизелями, превышает 27 оС (сигнал «1» от контактных термореле воздуха, засасываемого ГД1 или Г Д2, через промежуточное реле К 1, К2).
Аналоговые сигналы нагрузки ГД F 1, F 2 вырабатываются электронными датчиками подачи топлива (наполнения) ДН, работа которых обеспечивает также приведение в действие указателей наполнения на ПВМ и в МО. Сигналы нагрузки F1, F2 поступают в схему контура через МОП-ключи 5-1б, 5-17, которые коммутируются логическими сигналами введения соответствующего ГД в работу на гребной вал (включены муфты ПМ1, ПМ3 или:. ПМ2, ПМ3). С помощью аналоговой схемы на ОУ 5-14 выполняется функция выделения наибольшего из двух входных сигналов F1, F2, который в дальнейшем и учитывается как сигнал загрузки ГД F. Последний поступает на вход сумматора 5-10, выделяющего сигнал рассогласования F-Fз, а также на вход компаратора перегрузки F> 105 % (5-12).
Схема защиты ГД от перегрузки приводится в действие только при.вводе в работу валогенератора (от переключателя на ГРШ подается логическая «1» на деблокировку выходного ключа «И» 5-3). Два компаратора на ОУ модуля 5-9


Рисунок 9.8. Схема контура регулирования нагрузки ГД
вырабатывают логические сигналы «Предельная нагрузка». (F - F3 >0) и «Превышение зоны нечувствительности» (│F - Fз│>0), управляющие исполнительными элементами регулирования нагрузки. Блок логики представляет собой комбинационную логическую схему, реализованную в модулях 5-3, 5-5, 5-б, 5-7 и предназначенную для формирования логических сигналов режима работы контура управления ВРШ «Набор хода» и «Сброс хода», согласования работы регулирования нагрузки с режимами хода «Вперед», «Назад» и реверсирования. Схема контролирует выходы компараторов 5-9 регулирования нагрузки, а также компараторов 5-8, набор логических сигналов которых определяет текущее динамическое состояние контура управления ВРШ.
Аналоговый блок формирования сигнала понижения шага ∆Н при превышении уставок нагрузки F>F3 или F> 105 % состоит из задающего резистора R34 (модуль 6-10), задающего усилителя (ЗУ) с двумя ступенями коэффициента усиления и переключателя полярности (ПП), установленных в модуле б-9. Резистором R34 можно регулировать уровень входного напряжения ЗУ, тем самым, изменяя величину сигнала ∆Н и соответственно скорость снижения шага при сбросе нагрузки. ЗУ имеет два логических входа управления МОП-ключами К1, К2, которые коммутируются логическими сигналами «Перегрузка» и «Предельная нагрузка».
Коэффициент усиления ЗУ по первому входу имеет большое значение, что обеспечивает более высокий уровень сигнала ∆Н в режиме перегрузки и тем самым увеличенную скорость понижения шага.
Переключатель полярности (ПП), в состав которого входят инвертор на ОУ и МОП-ключ К3, коммутируемый логическим сигналом компаратора знака шага Н>0 5-8, предназначен для вывода сигнала понижения шага δН полярностью, противоположной знаку фактического шага ВРШ.
Рассмотрим совместную работу контуров в режиме разгона судна при наборе хода и при переменной нагрузке. В исходном состоянии имеется сигнал единица на выходе компаратора повышения зоны нечувствительности │ F – Fз │ >∆F (5-9). Этим сигналом с выхода блока логики замыкается ключ К4, подключая вход ИЗШ. При перестановке рукоятки ЗШ на вход контура управления ИЗШ подается сигнал заданного шага Нз. В логической схеме блока логики контура регулирования нагрузки на основе логических сигналов компараторов 5-8, 6-8 формируется единичный сигнал «Набор хода», который переключает ПВР на нижнюю ступень коэффициента усиления, определяющего скорость набора шага, ИЗШ начинает отработку сигнала рассогласования ∆Нз, его выходное напряжение Нз плавно нарастает и поступает как задающий сигнал в контур управления СП, изменяющий шаг ВРШ. Если в процессе изменения шага нагрузки ГД не достигнет границы зоны нечувствительности, установленной ЗН, т. е. если F <Fз - ∆F, то по завершении отработки ĤЗ = НЗ и Н = Ĥз. Если при наборе хода достигнут уровень нагрузки F>Fз - ∆F, то компаратор зоны нечувствительности 5-9 формирует нулевой сигнал, размыкающий ключ К4. При этом вход ИЗШ отключается от цепей задания, его выходное напряжение Нз фиксируется и дальнейшее увеличение шага прекращается.
В режиме хода судна с постоянным шагом и переменной нагрузкой, например при тралении в условиях волнения моря, регуляторы дизелей обеспечивают поддержание частоты вращения, увеличивая подачу топлива при увеличении нагрузки на гребном валу. Если уровень наполнения (подачи топлива) достигает установленного предела Fз, то происходит срабатывание 0/1 компаратора F-Fз>О (5-9). Его единичным сигналом «Предельная нагрузка» через блок логики переключается ключ К3 6-12, который отключает вход ИЗШ от цепей задания и подключает к нему выход блока понижения шага 6-9. Одновременно тем же логическим сигналом коммутируется ключ К2 6-9, т. е. включается ЗУ, и сигнал понижения шага δН отрицательной полярности подается на вход ИЗШ.
Выходное.напряжение ИЗШ - сигнал заданного шага НЗ понижается, что приводит к отработке сервоприводом снижения шага и тем самым к сбросу нагрузки. При входе рассогласования нагрузки F - Fз в зону нечувствительности ∆.F переключением 1/0 компаратора размыкается ключ К4. Тем самым фиксируется выходной сигнал ИЗШ Нз и прекращается понижение шага.
Включение ИЗШ ключами К4, К3 на восстановление сигнала задания Ĥз = НЗ происходит после снижения нагрузки ниже нижней границы зоны нечувствителъности Fз - ∆F. Установкой достаточной ширины зоны нечувствительности резистором ЗН достигается снижение частоты переключений элементов регулирования нагрузки при ходе на волнении, когда нагрузка имеет колебательный характер. Если при работе. валогенератора в результате повышения нагрузки ГД достигается предельный уровень подачи топлива Р= 105 %, то происходит срабатывание компаратора 0/1 перегрузки 5-12. Его единичный сигнал «Перегрузка» с задержкой 3с приводит к включению ключом К1 6-9 на большее значение сигнала понижения шага δН и одновременно к замыканию ключей К5-К6 в схеме ИЗШ. При этом на вход ИЗШ через сумматор 6-10, 7 и ключ К5 подается напряжение │ δН│+ │ Н │, имеющее отрицательную полярность, что приводит к быстрому понижению выходного напряжения ИЗШ, снижению шага и сбросу нагрузки.
Работа гидросистемы МИШ обеспечивается двумя основными гидронасосами с управлением по схеме «Стенд бай» и аварийным гидронасосом, резервирующим основные. Кроме основного контура установки шага сервоприводом, предусмотрена гидросистема запасного дистанционного позиционного управления шагом. Для управления гидросистемой установлены два двухходовых электромагнитных клапана: клапан включения (КВ) и клапан оперативного управления (КОУ). Кнопки управления электромагнитными клапанами расположены на КСП2, встроенной в ПВМ. По цепи питания (-24)В схема запасного управления автономна от системы ДАУ и действует независимо от ее состояния. Для приведения запасного управления в действие переключатель режима на ПВМ необходимо установить в положение «Управление ВРШ из ЦПУ». При этом ключом К1 6-5 задатчик шага отключается от входа контура управления ВРШ. Нажатием кнопки «Вкл. » открывается клапан КВ и, пользуясь кнопками «Шаг больше - шаг меньше », которыми переключается клапан КОУ, можно установить необходимый шаг по стрелочному указателю Н. Система указателей шага Н независима от контура управления ВРШ и приводится в действие от автономного ДУШ.
Наличие основных сигналов, обеспечивающих работу контуров (сигналы ЗШ, ДШ, ДН), непрерывно контролируется и в случае неисправности производится блокировка работы контуров. Испытательный режим контуров - «Проверка Ш» (РШ) - может быть выполнен при неработающей и работающей ССУ, но при условии, что муфта ПМ З отключена. Режим включается нажатием кнопки РШ и КИУ. В этом случае штатные сигналы ЗШ и ДН отключаются переключателями 6-5, 5-13, а взамен на входы контуров подаются испытательные напряжения Uзпр, Fпр с потенциометров-имитаторов модуля 1-24 КИУ.
Пользуясь стрелочным прибором и переключателями контрольных гнезд, на которые введены узловые точки контуров, и, имитируя сигналы ЗШ, ДН соответствующими потенциометрами, можно проверить отработку и локализовать неисправность. При проверке контура регулирования нагрузки можно также имитировать поступление сигналов «Тропический режим» и «Рабата валогенератора» нажатием соответствующих кнопок имитаторов КИУ.